景洪水電站水力式升船機事故工況分析及應對策略研究
2011-07-26 03:32:50石曉俊易春輝
水力發電 2011年10期
石曉俊,易春輝,劉 錦
(西安航天自動化股份有限公司,陜西 西安 710065)
景洪水電站采用水力浮動轉矩平衡重式垂直升船機 (簡稱 “水力式升船機”)。該升船機按V級航道、300 t級船型的標準進行設計,遠期考慮500 t船只通航過壩。水力式升船機的工作原理[1]是將平衡重做成質量和體積合適的浮筒,其總質量大于承船廂總質量,浮筒在可充、泄水的豎井內升降,通過調節平衡重浮筒在水中的淹沒深度,改變其所受浮力,利用浮力變化在承船廂與平衡重浮筒之間產生的重力差值來驅動承船廂升降運行。
景洪水力式升船機主要由充泄水系統、承船廂系統、上閘首系統、同步軸系統、制動系統及鋼絲繩連接系統等組成[2]。
由于景洪水力式升船機驅動方式完全不同于國內已經建成的水口、巖灘、高壩洲、隔河巖和彭水升船機所采用的垂直卷揚式,也不同于三峽升船機采用的齒條爬升式;因此,其可能發生的事故工況、造成的嚴重后果以及可以采取的有效應對措施都沒有成功的經驗可以借鑒。
本文依據景洪水力式升船機工程實際,借鑒在垂直卷揚式升船機事故工況分析及應對策略研究的成功經驗,結合水力學分析和模型試驗成果,對景洪水力式升船機可能發生的主輔泄水閥門故障、主輔充水閥門故障、浮筒及豎井故障、上游快速事故門誤動、下游快速事故門誤動、承船廂故障、同步軸及制動器故障、鋼絲繩故障、通航水位超出范圍、下游水位變幅過快、電源故障、監控網絡故障和檢測故障等故障工況進行了分析和研究,最后總結出供水力式升船機電氣控制系統設計及運行時可采取的應對策略。
1 充泄水系統
1.1 主輔泄水閥門故障分析
主、輔泄水閥門布置如圖1所示。當升船機上行時,先開啟泄水輔閥,升船機系統慢速啟動并加速上升。船廂出水后,開啟泄水主閥,船廂加速上升。加速完畢后,水力驅動系統自動轉為穩速上升,提升過程中,連續讀取上游水位、船廂水深及船廂行程等數據。當運算的剩余行程與減速行程給定值相等時,關閉泄水主閥,驅動系統正常減速上升。當承船廂內水位高程與上游航道水面高程差值達到預定值時,完全關閉泄水輔閥,驅動系統正常停機。
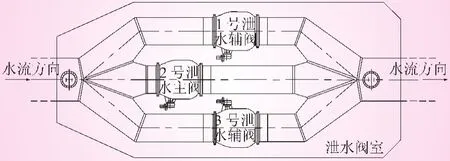
圖1 泄水閥門布置示意
主輔泄水閥門作為景洪升船機上行的關鍵控制對象,其有可能發生主輔泄水閥門均不能開啟、均不能關閉、閥門漏水及閥門開度無法正常檢測等故障情況。當主、輔泄水閥門中有個別不能開啟時,升船機不能按照設計工況運行,只能通過手動開啟正常泄水閥門緩慢泄水,影響運行效率,但不會造成安全事故;當主輔泄水閥都不能打開時,承船廂不能提升,如果承船廂位于下游對接位,且恰遇下游水位快速上漲,可能會發生水淹船廂的重大事故,此時必須快速關閉承船廂下游臥倒門,并通過輸水系統主管檢修排水泵泄水以提升承船廂。
在承船廂運行到上游時,如主輔泄水閥門故障而不能關閉,承船廂快速提升,可能沖過上極限位,同時浮筒落到消能工上,此時必須通過關閉下游快速事故門切斷泄水水流,制止承船廂上升。
當泄水閥門漏水時,升船機在上游對接鎖定前無法精確停位,對接鎖定后會造成制動器受力平衡破壞,可以通過關閉下游快速事故門應對該故障。當控制系統不能檢測到泄水閥門開度時,應快速關閉泄水閥,同時監測豎井水位情況,如水位仍在變化可以緊急關閉下游快速事故門以停止升船機運行。
1.2 主輔充水閥門故障
主輔充水閥門布置與泄水閥門相同,中間主充水管道上布置充水主閥,兩側布置充水輔閥。其同樣也有可能發生主輔充水閥均不能開啟、主輔充水閥均不能關閉、閥門漏水及閥門狀態檢測故障等故障情況。
當主、輔充水閥門有個別不能開啟時,升船機不能按照設計工況運行,只能通過手動開啟正常充水閥門緩慢充水,影響運行效率,但不會造成安全事故;當主、輔充水閥都不能打開時,承船廂不能下降,不會造成安全事故。
當升船機運行至下游水面附近主、輔充水閥門故障不能關閉時,承船廂快速下降,可能淹沒水中,此時必須通過關閉上游快速事故門切斷充水水流,制止承船廂下降。
當充水閥門漏水時,升船機在下游對接鎖定前無法精確停位,可以通過關閉上游快速事故門應對該故障。當控制系統不能檢測到充水閥門的開度時,應快速關閉充水閥,同時監測豎井水位情況,如水位仍在變化必須緊急關閉上游快速事故門以停止升船機運行。
1.3 浮筒及豎井故障
16個豎井水位在運行過程中可能會出現偏差,16個浮筒中可能會有個別浮筒漏水,導致對浮筒產生不同的浮力,同步軸和個別鋼絲繩受力將會增大,嚴重情況下可能發生同步軸斷裂等事故。所以電氣控制系統應實時監測16個豎井水位及偏差、16個浮筒位置及偏差、16個浮筒內水深及偏差、64根均衡油缸壓力及偏差、64根調平油缸壓力及偏差、同步軸扭矩等參數。其超出設定范圍時,應報警并停止運行,查明原因并處理后方可繼續運行。
1.4 快速事故門誤動
當升船機處于下降過程中,如果上游引水管進口快速事故門異常落下,承船廂由下降轉為快速停止,船廂可能會產生振動。當升船機處于上升過程中時,由于是泄水閥門打開,所以上游引水管進口快速事故門異常落下不會影響升船機的運行。如果升船機在對接位對接時引水管進口快速門落下,由于對接時充、泄水系統所有閥門均關閉,所以不會造成嚴重后果。
下游快速事故門異常落下同上游事故門,也不會造成嚴重后果。
2 承船廂事故
承船廂可能發生船廂漏水、船廂內水深超范圍、船廂傾斜等事故工況。
如果制動器未在制動位置時承船廂漏水,承船廂變輕,浮筒沉入水中部分增多,仍保持平衡,但是廂內船舶觸底,升船機無法精確停位。此時應該驅動承船廂下行到下游并對接,同時檢查漏水原因,整個過程要嚴禁制動器制動。如果制動器在制動位置時船廂漏水,船廂側質量減輕,兩側受力不平衡,可以判斷豎井水位與船廂質量 (水深)是否在安全范圍內,如果在安全范圍內則立即松開制動器;如果不在安全范圍內,調節豎井水位以適應船廂質量,然后松開制動器。
當承船廂內水深低于2.3 m時,承船廂質量超出允許范圍,此時應到下游對接位對接補水,然后再進行正常運行。
承船廂傾斜會造成船廂質量分布不均,鋼絲繩受力不等,如果承船廂傾斜嚴重可能造成船廂與船廂池壁摩擦。此時應該驅動船廂到調平位置進行調平,且升船機在運行過程中應注意當承船廂水平度不滿足要求時及時調平!
3 同步軸及制動器系統事故
連接卷筒的同步軸有可能發生斷裂事故,造成承船廂傾斜。所以應限制豎井水位差值范圍,超出范圍時停止升船機運行。
制動器可能會出現意外制動、動作不同步和不動作等故障工況。如果在承船廂下降時制動器意外制動,豎井內水位不斷上升,承船廂向下滑移。如果在承船廂上升時制動器意外制動,豎井內水位不斷下降,承船廂向上滑移。此時應關閉對應充、泄水閥門,并判斷豎井水位與船廂質量 (水深)是否在安全范圍內,如果在安全范圍內則立即松開制動器。所以在制動器松閘前應判斷并預調整豎井水位以適應承船廂質量。
如果個別制動器動作不同步或沒有動作,將會造成相應卷筒及同步軸受力增大。如果制動器動作不同步,應立即松開所有制動器,然后嘗試重新制動。如果所有制動器不動作,由于制動條件是浮筒與承船廂受力平衡,所以不會造成安全事故。此時可以停止升船機運行,然后檢查維修制動器。
4 鋼絲繩連接系統事故
連接浮筒和承船廂的鋼絲繩有可能發生受力不均勻和伸長不均等故障情況。當鋼絲繩受力不均勻時,卷筒及同步軸受力增大。所以,應實時監測承船廂水平狀態、均衡油缸和調平油缸壓力以判斷鋼絲繩受力情況,發現問題及時處理。
5 其他事故
5.1 通航水位超出范圍
如果升船機在運船上行時上游水位突然超出通航范圍,造成升船機不能在上游對接,廂內船只不能出廂。如果升船機在運船去下游時上游水位突然超出通航范圍,則不影響升船機本次的運行。應對該情況的方法是升船機下行到下游對接位對接后放出廂內船只,然后停止運行。
如果升船機在運船下行時下游水位突然超出通航范圍,造成升船機不能在下游對接,廂內船只不能出廂。如果升船機在運船去上游時下游水位突然超出通航范圍,則不影響升船機本次的運行。應對該情況的方法是升船機上行到上游對接位對接后放出廂內船只,然后停止運行。
5.2 下游水位變幅過快
景洪水力式升船機在下游采用的是入水對接方式,如果承船廂在下游對接期間遇到下游水位快速上漲,可能發生水淹船廂事故。應采用入水式升船機下游對接微調安全應急處理程序,根據下游水位實時調整船廂位置。同時,為了更加安全,在下游對接流程中不應該考慮制動器、頂緊裝置、夾緊裝置的投入。
5.3 電源故障
如果驅動LCU(現地控制單元)電源故障,則控制流程無法進行,當船廂在運行中,無法判斷是否運行到位,此時只能緊急關閉充、泄水閥門和進、出水口事故門,保持船廂位置不變,依靠受力平衡停穩船廂。
如果充水閥門在開啟狀態突然斷電,豎井水位不斷上升,船廂會不斷下降,可能發生水淹船廂事故,所以必須緊急關閉上游快速事故門,切斷充水水流,保持船廂平穩停機。如果泄水閥門在開啟時突然斷電,豎井水位繼續下降,船廂會不斷上升,此時必須緊急關閉下游快速事故門,切斷泄水水流,停止升船機繼續運行。
制動器如果失去了驅動力,會自動制動,如果充、泄水閥在開啟狀態,將會造成嚴重事故,此時必須緊急關閉充、泄水閥門,同時根據船廂高程和水深調節豎井水深,保持浮筒和船廂兩端受力平衡。
承船廂在上游對接狀態突然斷電,不能解除上游對接,如上游水位變化較快,應關閉上閘首工作小門以切斷與上游水庫的連通。承船廂在下游對接狀態突然斷電,不能解除下游對接,如下游水位變化較快,驅動系統應啟動微調程序調整承船廂位置。
當承船廂在上游對接時上閘首子站突然斷電,升船機系統不能解除上游對接,如果上游水位變化較快,可能發生事故,必須關閉承船廂上游臥倒門以切斷與上游水庫的連通。
集控系統斷電不影響升船機正常運行,各現地控制子站轉入現地控制方式可以繼續運行升船機到安全狀態。
5.4 控制系統網絡故障
景洪水電站升船機監控網絡由光纖雙環以太干網和各現地子站內部網組成。網絡故障可能會發生在每個現地子站內部,也可能在雙環以太網。
如果驅動現地子站內部網絡故障,將無法向制動泵站控制單元、充水閥門控制單元、泄水閥門控制單元、下游閥室出水口快速事故門控制單元下發動作命令和停止動作命令。此時只能通過驅動的遠程IO系統快速關閉充、泄水閥門,同時也可以關閉進、出水口快速事故門,以確保升船機安全。
如果是承船廂現地子站內部網絡故障,則承船廂頂夾緊裝置、防撞繩裝置、上游船廂門、下游船廂門等無法實現左右同步。如果在對接位置則無法解除對接,如果遇到緊急情況需要立即解除對接,可不考慮同步,通過手動方式收回船廂相關設備。
如果上閘首現地子站內部網絡故障,則上閘首工作大門、工作小門、引水管進口快速事故門無法與上閘首現地子站通訊,如果船廂在上游對接位,無法自動解除對接。只能將控制方式轉為手動后解除上游對接。
當監控雙環以太網網絡故障,無法實現站間正常通信,則升船機的運行安全將無法保證,升船機必須快速停止。所以在控制系統各現地子站間必須設有重要信號的硬接線閉鎖。
5.5 檢測系統故障
景洪升船機的檢測裝置數量繁多,檢測設備的類型也比較多,所以檢測設備故障在所難免。如果不能檢測船廂水深,則無法判斷船廂質量是否在允許范圍之內,存在安全隱患。應停止升船機運行,檢修維護。如在下游對接位,可根據船廂入水深度判斷船廂水深。但應避免制動器制動。如果用于檢測承船廂水平度的水平連通管故障,船廂水平狀態不能直接檢測,會影響升船機安全,但可通過船廂4角位置測量裝置粗略判斷船廂水平度。
當船廂入水深度檢測故障時,承船廂如在下游對接位,則可以通過船廂水深判斷入水深度;如在非對接位,則可通過船廂位置和下游水位間接計算出船廂入水深度。所以,此故障不會造成嚴重后果。
因為浮筒水位、位置檢測不作為直接控制使用,所以其檢測設備故障不會影響升船機正常運行。
6 結論
景洪水電站水力式升船機系統可能出現的最不利工況的分析表明,充、泄水閥門故障和制動器故障是影響景洪水電站水力式升船機安全運行最嚴重事故,而其他事故工況只會造成運行過程中斷,基本上不會影響升船機運行安全。
在此基礎上,我們制定了景洪水電站水力式升船機電氣控制系統保護原則,即①把需要緊急快速關閉上、下游事故門的事故工況定義為升船機一類故障。一類故障必須在盡可能短的時間內停止升船機運行,此過程不考慮運行平穩及對設備造成的影響。②將需要快速關閉充、泄水閥門的事故工況定義為升船機二類故障。二類故障要求在不對升船機設備造成影響的情況下平穩停止升船機運行。③其他事故工況定義為三類故障,三類故障只作為報警提示,不停止升船機運行,當完成一個運行流程后在查明原因,并排除故障。
目前,景洪水電站水力式升船機已順利完成單機和分系統調試,正在進行承船廂無水聯合調試。各階段的調試工作證明,對水力式升船機事故工況分析和應對策略是正確的。
[1] 張蕊,章晉雄,吳一紅,等.水力浮動式升船機輸水系統仿真分析[J].水利學報, 2007, 38(5):624-629, 636.
[2] 劉金堂,曹以南,凌云,等.景洪水力式升船機設計研究[J].水力發電, 2008, 34(4):43-45.
猜你喜歡
流程工業(2022年3期)2022-06-23 09:41:08
中國石油石化(2021年8期)2021-07-20 07:36:12
煤氣與熱力(2021年3期)2021-06-09 06:16:18
汽車維修與保養(2019年7期)2020-01-06 03:30:42
智富時代(2018年5期)2018-07-18 17:52:04
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
