三相異步電機的Z-SOURCE驅動性能分析
2011-07-28 01:32:00韓礎
網絡安全與數據管理 2011年21期
韓礎
(青島理工大學,山東 青島 266520)
傳統的電壓源逆變器和電流源逆變器拓撲在各種場合得到了廣泛的應用,且控制技術已經非常成熟,但是擺脫不了其自身所固有的缺點,從而使得在一些復雜的應用場合,傳統的電壓源或電流源逆變器受到了挑戰[1-3]。Z-SOURCE逆變器為系統的運行提供了一種低成本、高效率、良好操作性的結構。阻抗網絡的引進,將主變換器電路與電源或負載耦合,使Z-SOURCE逆變器既不是電壓源逆變器,也不是電流源逆變器,從而實現升/降壓很寬的調壓范圍,輸出電壓可以高于或低于輸入電壓。同時,Z-SOURCE逆變器的抗電磁噪聲干擾的能力也是它的優勢所在[3-4]。
1 Z-SOURCE逆變器
1.1 Z-SOURCE的結構
Z-SOURCE是一種基于Z-SOURCE儲能網絡的變換拓撲,之所以稱之為Z(阻抗)型逆變器,主要是其直流緩沖和儲能電路結合了VSI和CSI的特點,由獨特的阻抗網絡組成,這樣使得Z-SOURCE逆變器在直流儲能中具有二階特性,滿足了端口可開路可短路的條件。其電路結構如圖1所示。電路由輸入電源、二極管、兩個等值的電容、兩個等值的電感組成。其中,電容和電感連接成“X”形結構。二極管主要是防止反向電流,電容作為輸入到輸出的主要能量轉換元件。
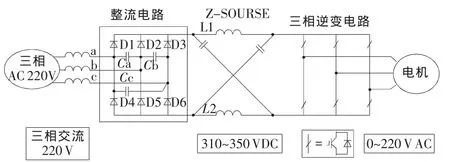
圖1 Z-SOURCE電路結構
1.2 Z-SOURCE逆變器工作原理
當 C1=C2,L1=L2,低壓脈動 VC1和 VC2的脈沖周期為 T,則:

其中,VC是電容電壓的平均值,VL是電感的瞬時電壓。考慮到等效和對稱原理,將電路中的器件視為理想元件,且開關頻率足夠高,則有:

其中Vf為輸入電壓。
在非直通狀態下:

假設一個脈沖周期T=TZ+TN,穩態時電感平均電壓VL=0,即:

因此,逆變橋的平均輸入電壓為:

當D<0.5,將式(3)~式(5)整理得直流側母線電壓與輸入電壓增益B:
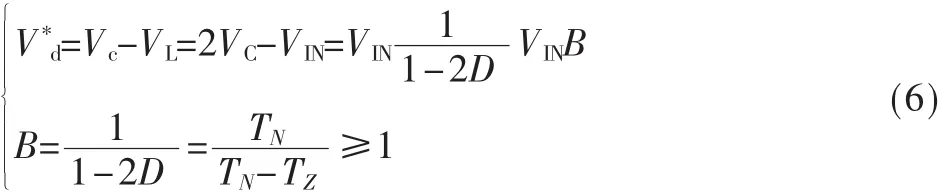
當正弦脈寬調制等振幅時,輸出的交流電壓基波幅值為:
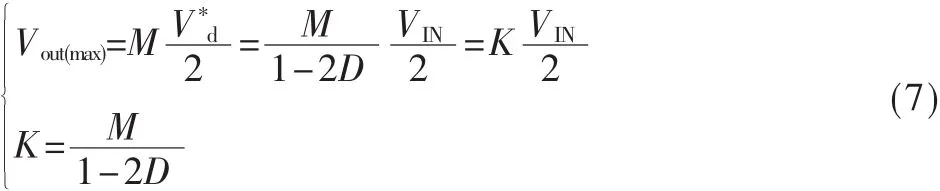
其中K為增益因子。
由式(7)可知,通過控制直流零矢量占空比D和調制因子M就可得到任意大小的交流輸出電壓。這同傳統的逆變器相比,系統的調壓范圍明顯得到增加。
2 PWM控制技術
PWM逆變器可分為單相、三相等。這些變頻器能產生交流電壓的變量級以及變頻。PWM逆變器常用于交流電機變頻變壓反饋調速驅動。為了得到很寬的調速范圍,交流電壓需要改變頻率與占空比[5-6]。Carrier-based PWM方法經常應用在逆變器中,因為它們都很簡單,易于實現,如圖2所示。開關信號生成PWM波形如圖3所示。這里生成的PWM波形實際上是由方波和三角波疊加而成,也稱SPWM法。
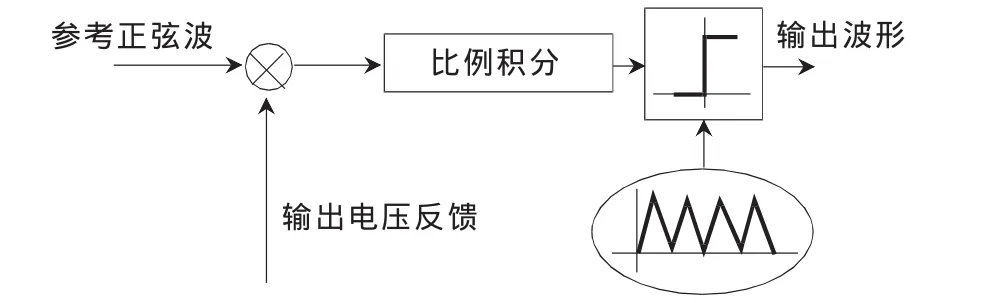
圖2 PWM生成電路
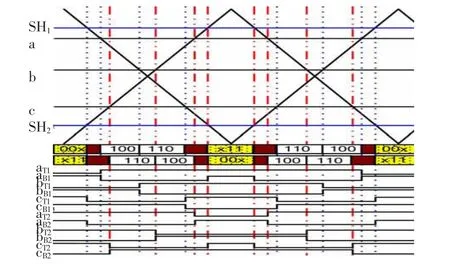
圖3 開關信號和Carrier-based PWM
3 仿真實驗
圖4顯示了Z-SOURCE系統驅動異步電機的主電路配置,即傳統的ASD系統。Z-SOURCE的ASD系統的主電路由三部分組成:二極管整流電路、直流環節和逆變橋電路。
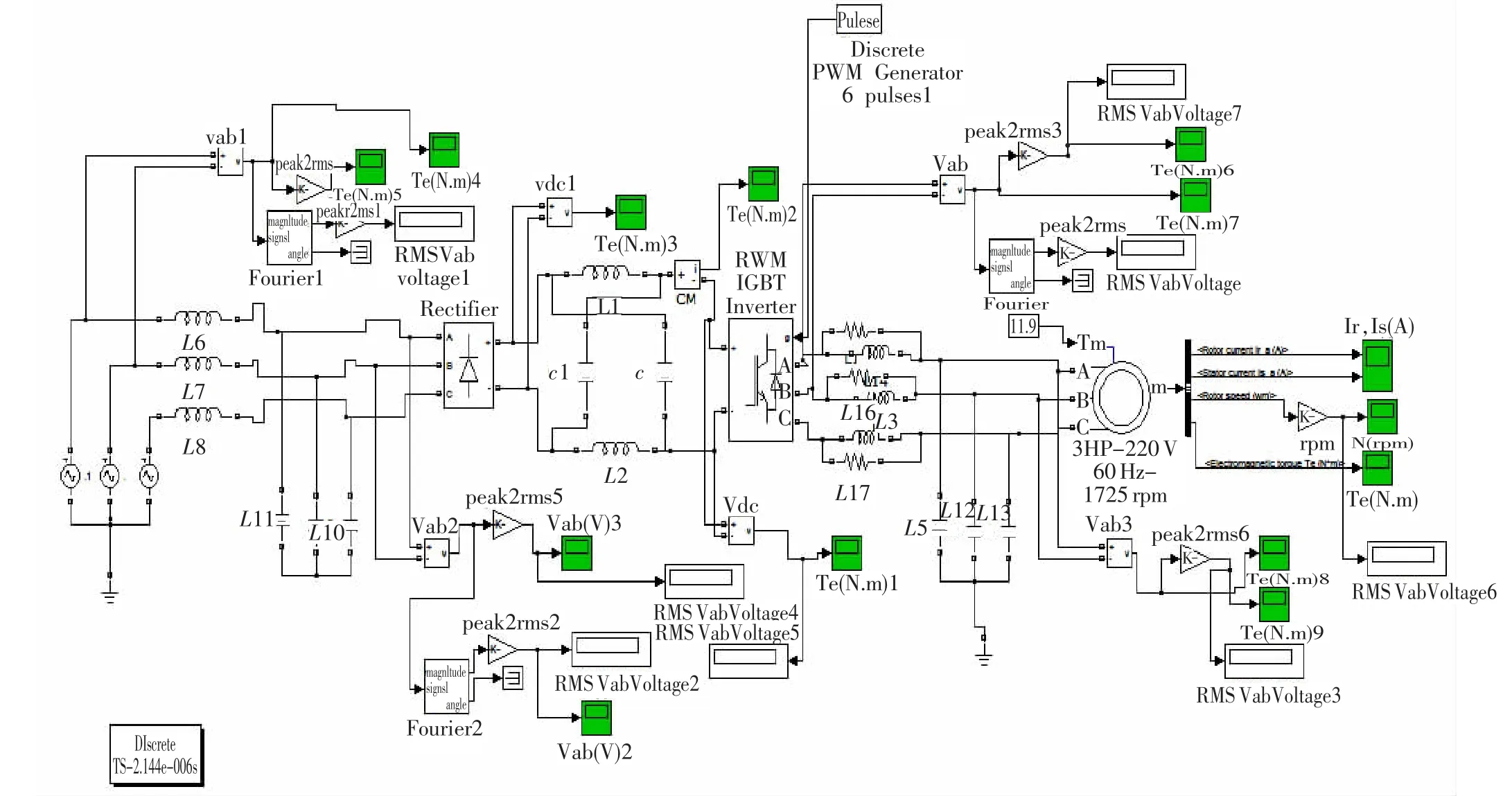
圖4 Z-SOURCE系統PWM IM驅動的SIMULINK模型
3.1 異步電機滿負荷響應(Tfl=11.9 Nm)
圖5所示為Z-SOURCE驅動異步電動機的電壓波形。由于Z-SOURCE阻抗網絡,在這里直流側電壓升高到309 V,相當于直流環節電壓220 V的1.38倍。定子、轉子的線圈繞組電流在短時間內瞬變,如圖6~圖8。
啟動電流很大,但1.16 s范圍內達到穩態值。定子電流穩態值等于13.4 A。穩態轉子電流值等于13.10 A。觀察到速度達到穩態值在1.09 s,轉速為1 718 r/min時電機負荷為11.9 Nm。所以當電機收到Z-SOURCE逆變器網絡的反饋信號,隨時間的增加速度遞增,這是由于電壓經過Z-SOURCE變頻器后達到218 V。異步電動機的電磁轉矩波形如圖9所示。
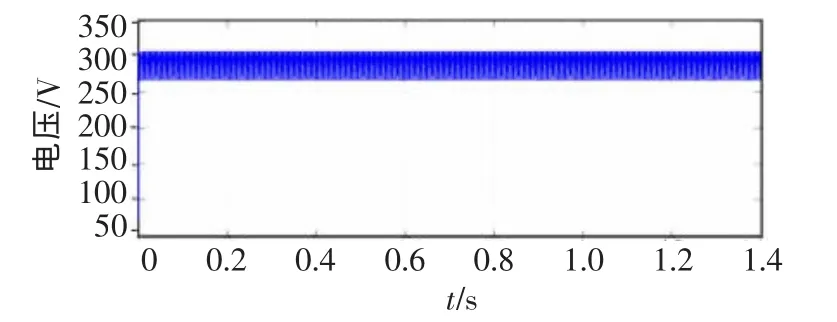
圖5 直流側電壓波形
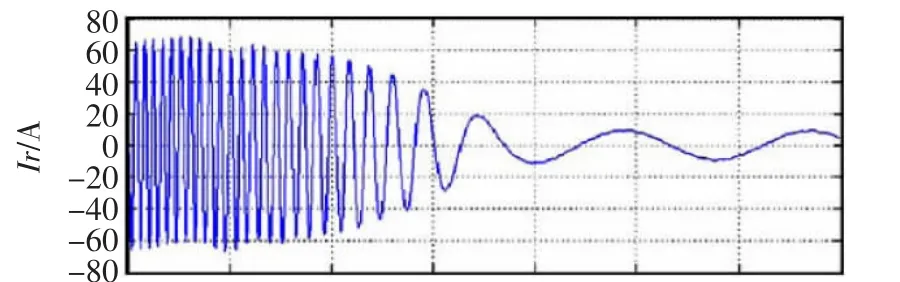
圖6 轉子電流(滿負荷下的單相電流Ir=19.06A)
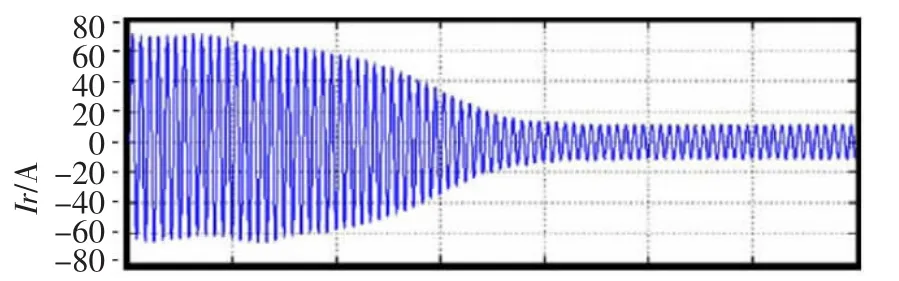
圖7 定子電流(滿負荷下的一相電流Is=17.09A)
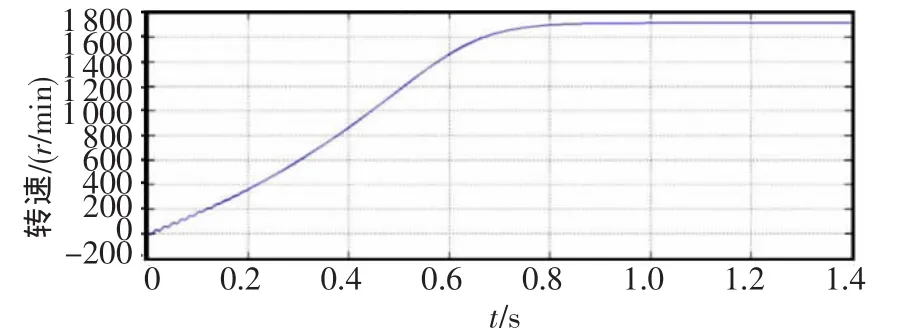
圖8 滿負荷下的轉子轉速(ns=1714,ts=0.89)
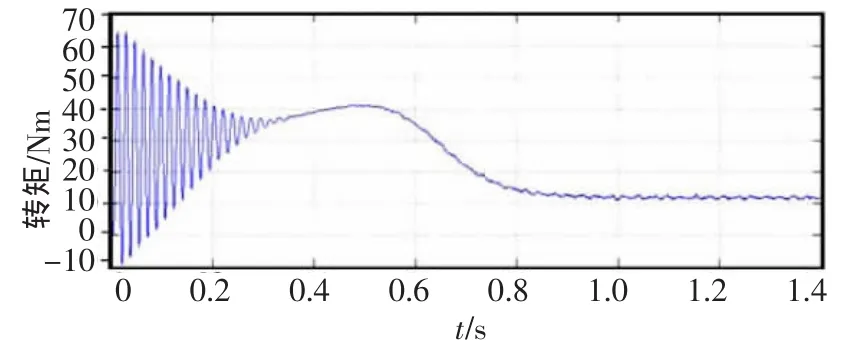
圖9 滿載狀態下的電磁轉矩
3.2 異步電機空載響應(Tfa=0 Nm)
可以觀察到電機空載且在0.736 s時轉速穩態值是1 799.4轉。所以當電機經過Z-SOURCE逆變器后速度遞增得越來越緩慢。
圖10~圖13所示為轉子空載電流、定子空載電流、空載下的轉子轉速及空載下電磁轉矩的波形。
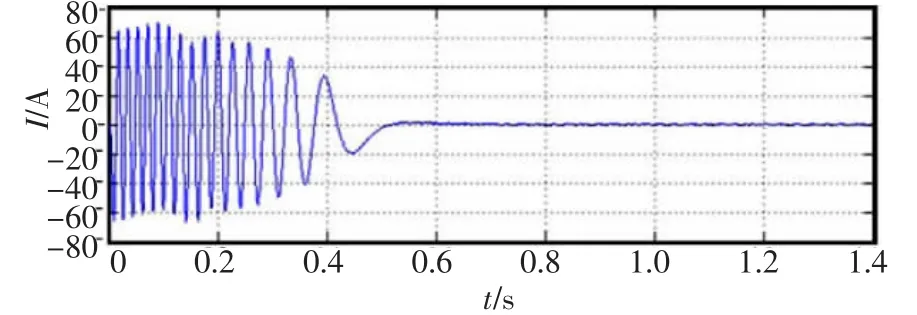
圖10 轉子空載電流
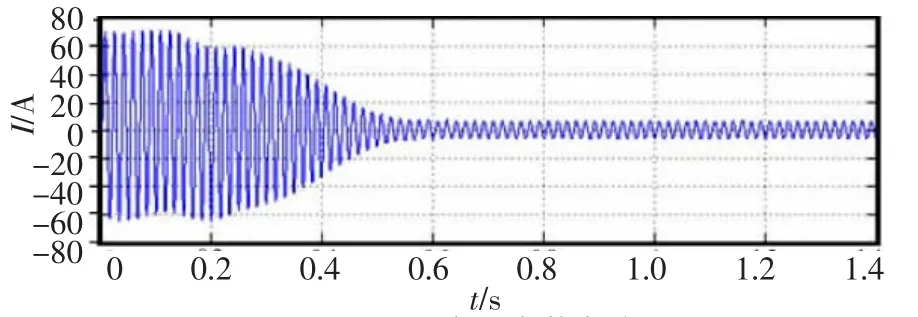
圖11 定子空載電流
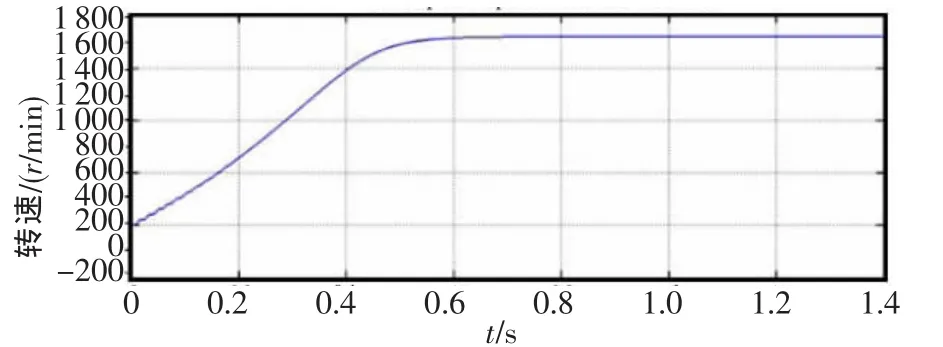
圖12 空載下的轉子轉速
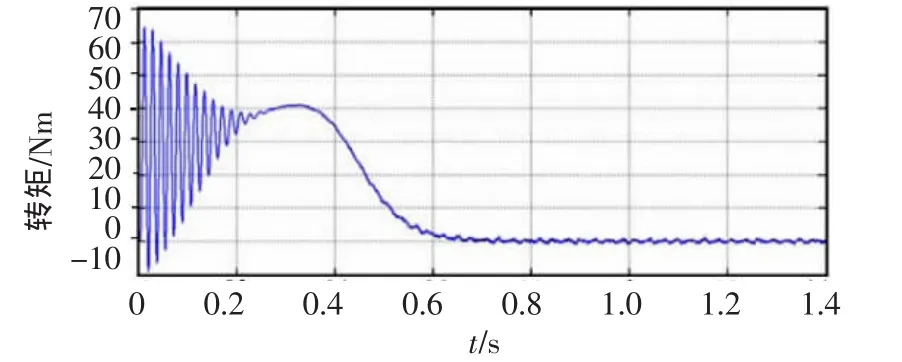
圖13 空載下的電磁轉矩
本文對三相異步電機Z-SOURCE逆變器進行了分析,并用SIMULINK/MATLAB工具箱進行了模擬。研究了不同工況下三相異步電動機性能參數如轉子電流、定子電流、轉子速度和電磁轉矩。最后得出結論,通過PWM技術驅動三相異步電動機Z-SOURCE逆變器會達到一個滿意開環控制結果。
[1]STEFANOVIC V,MILLER J M.Toroidally wound Induction motor-generator with selectable number of poles and vector control:US,6,876,176 B2[P].2005-04-05.
[2]JIUHE W,HONGREN Y,JINLONG Z,et al.Study on powerdecoupling controlofthree phase voltage source PWM rectifiers[C].Power Electronics and Motion Control Conference,2006.
[3]PANA T,STOICUTA O.Controllers tuning for the speed vectorcontrolofinduction motordrive systems[C].in Proceeding Int.Conference IEEE AQTR –Cluj-Napoca,2010:1-6.
[4]SHEN M, WANG J, JOSEPH A, et al.Maximum constant boost control of the Z-source inverter[C].IEEE Industry Applications Soc.Annu.Meeting,2004.
[5]崔建鋒,李永奇,王義琴,等.基于 DSP的開關磁阻電動機調速系統位置傳感器誤差補償[J].沿海企業與科技,2007,87(8):53-55.
[6]蘇寶平,全力.基于DSP的開關磁阻電機無位置傳感器控制系統設計[J].計算機測量與控制,2004,12(9):846-848.
[7]許力.智能控制與智能系統[M].北京:機械工業出版社,2007:25-81.