三取二平臺的時鐘同步算法
2011-07-30 10:35:04潘雷
鐵道通信信號 2011年12期
潘 雷
*卡斯柯信號有限公司 工程師,200071 上海
1 時鐘同步介紹
高安全性、高可靠性系統經常會使用三取二平臺作為系統處理器,尤其在鐵路信號領域中,有些設備可能需要持續工作幾年甚至幾十年,并且系統安全完善度等級需達到SIL4,這些需求對硬件的搭建提出了許多苛刻的要求。在搭建三取二平臺中,最重要的有2個功能:第1個是時鐘同步;第2個是數據同步,也稱為數據一致性比較。這里主要介紹時鐘同步算法。
三取二平臺中,3個通道獨立工作,但需要進行準確的時鐘同步,否則無法獲取相同的輸入值,也無法獲得一致的運算時序,最終就無法進行三取二的運算而獲取正確的結果,所以時鐘同步對三取二平臺而言是最為基本的功能需求。
在三取二平臺的時鐘網絡中,由于3個通道分別工作,時鐘是獨立的,故系統無法得知真正準確的絕對時間。時鐘同步的概念就是3個系通過某種算法協商出一個時間,同時需要證明這個協商出來的時間是一個最優的時間估值。
時鐘同步理論中,一般將時鐘同步分為2類:緊耦合時鐘同步和松散耦合時鐘同步 (又稱宏時鐘同步Macro-Synchronisation)。緊耦合時鐘同步是指在同一個時鐘控制下,所有CPU的執行時鐘完全同步。從IEC61508中得知,三取二系統如果需要達到更高的安全性,需要降低三系之間的耦合度,以降低共模系數。在國外的一些三取二系統中,人為地讓三通道錯開一個小的間隙 (tick)進行運算,就是為了降低共模系數;同時由于現在的CPU內部都有鎖相環,所以嚴格的物理時鐘同步已經不現實了,現在廣泛應用的三取二平臺一般采用松散耦合的方式進行時鐘同步。
這里主要討論松散時鐘同步方式。松散時鐘同步下還有2類實現方式:硬件實現和軟件實現。在本質上,這2種方式并沒有什么區別,只是時間同步精度的差別。由于軟件時鐘同步需要一定的運算開銷和數據傳遞開銷,所以在時鐘同步精度上無法和硬件時鐘同步相比,通過對2種時鐘同步方式進行驗證后發現,相同的同步算法精度在2種情況下會相差一個數量級。
2 時鐘同步基本概念
通過對相關參數進行數學量化,能夠比較時鐘同步算法的優劣。
2.1 時鐘周期

這里關注的是T,為邏輯時鐘,也就是需要同步的時鐘;t為物理實際時鐘,而C就是時鐘同步方程。
2.2 時鐘漂移
一個正確的物理時鐘應該有一個正常的漂移范圍,假設t2>t1,則:

其中,ρ為最大物理時鐘偏差,一般由時鐘源的物理特性決定,從時鐘提供者的數據手冊可以查到,公式說明時鐘漂移為有界的,正確的物理時鐘與實際時間是線性關系。i代表通道號。
2.3 一致性
相同正確的物理時鐘之間有一個正常的擺動范圍:

其中,i和j代表通道號;δ為同一頻率的不同時鐘之間的最大擺動。δ有界,它也是問題所在。如果時鐘完全一致,那么也不存在同步問題。正是由于不同通道之間存在擺動,才有時鐘同步問題,因此這個參數就是我們重點關注的。
2.4 精確性
存在常數γ>0,它和a、b常數一起使得如下公式成立:

也就是時鐘在有限時間內的誤差可以被2個線性函數包含,即絕對誤差有界。這也是同步時鐘追求的,也就是說,不但要同步而且要精確。
在設計時鐘同步器時,首先需要有這2個要求,然后才能提出合理的解決方案,選定不同參數去滿足這2個需求。
滿足一致性條件表明正確邏輯時鐘之間的最大偏差是有界的;而準確性條件表明正確的邏輯時鐘與實際時間是線性關系。
需要注意到γ是邏輯時鐘漂移率的一個邊界,同時它也是邏輯時鐘的準確性。我們只對那些γ值最小的時鐘同步算法感興趣。而精確性公式 (4)能夠證明γ≥ρ,所以只對滿足這個條件的算法有興趣。如果一個同步時鐘算法是最優的,那么必須滿足:任k≥1,t∈[endk,endk+1] ,滿足如下

其中a,b與算法的初始化相關。
3 集中-非平均方式同步算法
在時鐘同步算法中,有如下幾種方式:集中方式、一致性方式和概率方式。這里不做詳細介紹,比較常用的方式是集中方式,其下面又有集中-平均方式和集中-非平均方式。為了避免一個通道的失效影響到其他通道 (稱為拜占庭式失效),集中-平均方式需要至少4個及以上通道,才能做到避免拜占庭失效,它的理念基本上是取平均數,由于不適合三取二模型,這里也不做介紹,這里只介紹集中-非平均方法,適用于三取二的方式。集中-非平均方式同步方程涉及以下內容。
m為最大容忍錯誤通道數,n為通道數,需要滿足如下條件n≥2m+1,在三取二中,n=3,m=1;每一個通道都周期性的尋求時鐘同步 (分布式時鐘同步),每一個通道到達自己時鐘周期時發布同步信息,同時在給定時間窗內接收到達的時鐘同步消息,如果接收到m+1即2(如果是三取二的話,m=1)條信息,立刻啟動同步,同時將接收到的信息向其他所有通道轉發。見圖1。
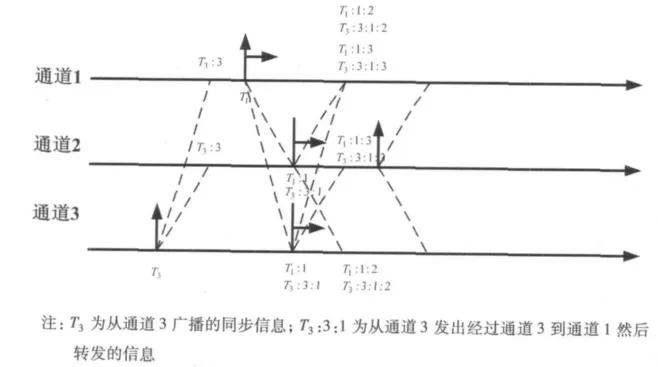
圖1 通道時鐘同步圖
從圖1中可以看出,假設通道3最快,通道1其次,通道2最慢。通道3最快而最先到達周期節點,那么它廣播自己到達的消息給所有通道,然后等待。通道1第二快,它在自己的一個給定窗口內接收到來自通道3的同步信息,然后過一段時間它又接收到自己到達的消息,這個時候它相當于接收到了2個通道的同步消息了,可以重新啟動同步計數器,并認定已經同步,同時將自己的同步消息廣播出去,并傳遞所有接收到的消息給其他所有通道。
這個時候通道3接收到了通道1廣播的消息和傳遞的消息,通過消息認定已經有2個通道到達同步了,也可以啟動自己下一個同步周期。同樣通道2接收到通道3廣播過來的同步消息和通道1廣播和傳遞的消息,通過消息確認也發現有2個通道已經到達了,所以不用等待自己的時鐘周期是否真的結束,立刻重新啟動新的時鐘周期來保證同步。
本時鐘同步方式并不是以最快的時鐘為準,而是以中間的時鐘為準,這里給出這個方程的一致性結果,如 (5)式,表1為 (5)式變量。


表1 變量參數表
d為信息傳播延時 (通信延時加上消息驗證延時),上式近似為δ≈d+2ρR,在給定δ下,可以反推其他參數,這樣就能設計出符合要求的定時器。
在試驗中使用硬件和軟件2種方式進行驗證,R=1ms,即同步時鐘周期為1ms,軟件采用高速串口傳輸;硬件采用TTL電平互聯,由于串口傳輸和驗證d=50 μs,所以,軟件方式的δ≈50 μs,而硬件傳輸延時可忽略,δ≈d+2ρR ≈2ρR < 1 μs,試驗結果與上述數據相當,可見使用此方法進行時鐘同步可以取得比較好的同步效果。
4 初始化、升級操作
初始化操作:這個算法本身就帶有明顯的修正能力,在初始化過程中使用上述方式就能夠完成初始化,只是初始化時對一致性沒有要求,但是正常操作時,如果通道之間的一致性差別大于某個閾值的話,需要切斷該錯誤通道。
升級操作:如果三取二降級為二取二后,經過維護,再次升級到三取二模式,當一個通道p想加入一個系統時,它發送 (加入)消息給系統中當前的所有通道,然后從這些通道接收到消息,被告知當前系統是出于哪個時鐘同步階段k,由于p可能是在同步周期的中期階段開始它的算法,因此它要等到系統進行下一次時鐘同步時方可加入。當通道p接收到k+1次時鐘同步消息時,它將開始其邏輯時鐘
5 結論
可以證明這種時鐘同步方式可以達到最優同步時鐘的要求,同時這樣的時鐘同步器也比較適合三取二系統中使用。
這種時鐘同步器可以由軟件方式實現,本項目組通過使用串行通信在1 MHz時鐘下,完成1 ms的時鐘同步,誤差在10 μs左右,同時也在硬件中完成相同的實現,精度在1 μs左右。
[1] Srikanth& Toueg.Optimal clock synchronization.Journal of the ACM .1987:624-645.
[2] David Powell.Generic fault-Tolerant architecture for real- Time dependable systems.Kluwer Academic Publishers.2001:27 -34.
[3] Lundelius-Welch & Lynch.A New Fault-Tolerant Algorithm for Clock synchronization.Information and Computation .1988:1-16.
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
工業設計(2022年8期)2022-09-09 07:43:20
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
家庭影院技術(2017年9期)2017-09-26 03:41:45
中學生數理化·中考版(2017年12期)2017-04-18 12:55:05
