基于隨機(jī)振動分析法的雙橫臂懸架扭桿優(yōu)化設(shè)計(jì)
2011-07-31 08:54:04周水庭黃紅武朱位宇
中南大學(xué)學(xué)報(bào)(自然科學(xué)版) 2011年12期
關(guān)鍵詞:優(yōu)化
周水庭,黃紅武,朱位宇
(1. 廈門理工學(xué)院 機(jī)械工程系,福建 廈門,361024;
2. 湖南大學(xué) 汽車車身先進(jìn)設(shè)計(jì)制造國家重點(diǎn)實(shí)驗(yàn)室,湖南 長沙,410082)
車輛出現(xiàn)懸架靜撓度過大、前懸架偏軟、車架容易撞擊限位塊和前輪定位角度變化超標(biāo)等現(xiàn)象,這主要是偏頻設(shè)計(jì)值過低和懸架剛度偏小引起的。對于雙橫臂懸架系統(tǒng),韓銳等[1]利用矢量代數(shù)法建立了懸架導(dǎo)向桿系運(yùn)動的數(shù)學(xué)模型;岳驚濤等[2-4]結(jié)合有限張量法更精確計(jì)算空間機(jī)構(gòu)的運(yùn)動狀態(tài),并分析了硬點(diǎn)坐標(biāo)對前輪定位參數(shù)的影響;曾迥立[5]提出利用懸架傳遞杠桿比計(jì)算懸架剛度。本文利用虛功原理計(jì)算懸架剛度用Adams軟件進(jìn)行仿真驗(yàn)證。考慮到路面輸入為隨機(jī)振動,利用功率譜函數(shù)建立相關(guān)函數(shù),作為約束條件之一,優(yōu)化計(jì)算扭桿基本尺寸,以增加懸架剛度,減少撞擊限位塊次數(shù),限制前輪定位角的變化。
1 數(shù)學(xué)模型的建立及求解
1.1 雙橫臂扭桿懸架導(dǎo)向機(jī)構(gòu)運(yùn)動學(xué)數(shù)學(xué)模型
雙橫臂懸架的導(dǎo)向機(jī)構(gòu)可以看作空間四連桿機(jī)構(gòu),運(yùn)用矢量代數(shù),結(jié)合有限轉(zhuǎn)動張量法計(jì)算得到輸入軸轉(zhuǎn)動角度與輸出軸轉(zhuǎn)動的角度關(guān)系的超越方程[6],從而建立懸架導(dǎo)向桿系運(yùn)動學(xué)關(guān)系,并通過幾何關(guān)系,得到各個硬點(diǎn)的變化函數(shù)[3]。雙橫臂懸架結(jié)構(gòu)示意圖見圖1。圖1中:懸架下橫臂AB與轉(zhuǎn)軸1鏈接,上橫臂CD與轉(zhuǎn)軸2鏈接,E為轉(zhuǎn)向節(jié)連接點(diǎn)。定義單位矢量和分別為沿轉(zhuǎn)軸1和轉(zhuǎn)軸2轉(zhuǎn)動的正向;β為上橫臂CD以C點(diǎn)為旋轉(zhuǎn)中心繞旋轉(zhuǎn)軸2旋轉(zhuǎn)的角度,旋轉(zhuǎn)后,CD變至CD′;α為下橫臂AB以A點(diǎn)為旋轉(zhuǎn)中心繞旋轉(zhuǎn)軸1旋轉(zhuǎn)的角度,旋轉(zhuǎn)后,AB變至AB′;O′為車輪輪心;E點(diǎn)為車輪中心線延長線與虛擬主銷連線D′B′的交點(diǎn)。

圖1 雙橫臂懸架結(jié)構(gòu)示意圖Fig.1 Structural model of torsion bar of double wishbone suspension
1.2 懸架運(yùn)動過程中的導(dǎo)向機(jī)構(gòu)硬點(diǎn)求解
在上下跳動過程中,由于上外點(diǎn)D只繞轉(zhuǎn)軸2旋轉(zhuǎn),則根據(jù)幾何特性,可以求出D點(diǎn)坐標(biāo)值。根據(jù)矢量法,可以得到坐標(biāo)變化方程[1,3]:


點(diǎn)C坐標(biāo)系到整車原點(diǎn)O坐標(biāo)系的位移變換矩陣為:且C坐標(biāo)系繞O點(diǎn)坐標(biāo)系Y軸轉(zhuǎn)動角度為-β′O,繞Z軸轉(zhuǎn)動角-α′O,可以求出轉(zhuǎn)動角度變換矩陣為:
根據(jù)上橫臂CD繞轉(zhuǎn)軸2旋轉(zhuǎn)角度β,有:
則可以求得外球頭點(diǎn)坐標(biāo)。
在上下跳動過程中,下外點(diǎn)B繞轉(zhuǎn)軸1旋轉(zhuǎn),可據(jù)同樣方法求出B點(diǎn)坐標(biāo)。
根據(jù)結(jié)構(gòu)尺寸,輪胎中心至懸架上、下橫臂點(diǎn)和轉(zhuǎn)向節(jié)中心點(diǎn)的距離不變,根據(jù)向量模不變確定位置后,求出O′的位置。輪胎中心O′坐標(biāo)數(shù)學(xué)表達(dá)式為:


則可以算出輪胎中心O′的坐標(biāo);而輪胎中心點(diǎn)處垂向位移變化量可以表示為:

其中:zO′1和zO′2為輪胎中心點(diǎn)z向坐標(biāo)。
1.3 虛功原理求解懸架剛度
雙橫臂式獨(dú)立懸架彈簧的剛度可以假設(shè)為垂直作用在車輪上的1個虛擬剛度Cs,P點(diǎn)為上下橫臂延長線交點(diǎn),l為交點(diǎn)P到下橫臂B點(diǎn)的距離,m為下橫臂長度,dp為交點(diǎn)至輪胎接地處水平距離,Λ為輪距,CT為扭桿剛度,M為扭桿對懸架下橫臂的扭矩,如圖2所示。
根據(jù)虛位移原理[6]可知,在力Fs作用下輪胎繞地面點(diǎn)Q旋轉(zhuǎn)虛角度δφ,下橫臂懸架繞點(diǎn)A旋轉(zhuǎn)虛角度δ′,則:


圖2 懸架受力示意圖Fig.2 Force model of suspension
其中:α為扭桿初始角度;φ為扭桿旋轉(zhuǎn)后角度。
根據(jù)幾何關(guān)系得:

則求得輪胎所受垂向力Fs為:

根據(jù)剛度定義懸架剛度[7]:

在Matlab中計(jì)算得到剛度曲線如圖3所示。由圖3可以看出:在±60 mm跳動過程中,Adams仿真[7]計(jì)算結(jié)果與 Matlab數(shù)學(xué)計(jì)算結(jié)果趨勢接近,誤差在±10%以內(nèi);在±60 mm跳動范圍以外,出現(xiàn)的誤差主要是橡膠套的剛度變化引起的;當(dāng)壓縮或回彈到一定高度,橡膠套的剛度出現(xiàn)明顯變化導(dǎo)致剛度曲線出現(xiàn)突變,誤差最大達(dá)到13.7%。圖3可以用于說明在正常跳動的范圍內(nèi)本數(shù)學(xué)模型的可行性。

圖3 懸架垂向剛度圖Fig.3 Stiffness curve of the suspension
2 扭桿基本尺寸對懸架剛度的影響
在輪胎跳動過程中,由于空間導(dǎo)向機(jī)構(gòu)運(yùn)動的非線性,導(dǎo)致懸架剛度的非線性。為了保證懸架跳動符合總布置設(shè)計(jì)要求,前輪定位參數(shù)變化趨勢較小。在保證懸架硬點(diǎn)坐標(biāo)不變的情況下,分析扭桿直徑 d、扭桿有效長度Le和扭桿預(yù)扭角度α。由于改變下橫臂擺臂相當(dāng)于改變懸架硬點(diǎn),涉及到懸架和轉(zhuǎn)向的硬點(diǎn)配合,因此,沒有將下橫臂擺臂長作為影響變量分析。下面分析參數(shù)變化范圍取值為±10%時各個參數(shù)對懸架剛度的影響。
2.1 扭桿直徑對懸架剛度的影響
懸架剛度隨掃桿直徑變化曲線圖如圖4所示。從圖4可以看出,扭桿直徑分別為25,26和27 mm時,相對于中間值26 mm變化量為3.85%,將滿載時懸架剛度作為評價指標(biāo),剛度變化量為15%。

圖4 懸架剛度隨扭桿直徑變化曲線圖Fig.4 Stiffness curve of suspension with variable diameters
2.2 扭桿有效長度對懸架剛度的影響
懸架垂向剛度隨扭桿長度的變化如圖5所示。從圖5可見:當(dāng)扭桿有效長度分別為913.5,950.0和986.5 mm時,相對于中值變化量為3.85%,滿載懸架剛度,剛度變化量為2.56%。
2.3扭桿預(yù)扭角度對懸架剛度的影響
懸架垂向剛度隨預(yù)扭角度的變化如圖6所示。從圖6可見:當(dāng)扭桿預(yù)扭角度分別為8.41°,8.75°和9.09°,與中間值變化為 3.85%時相比,預(yù)扭角度對懸架剛度沒有影響。因?yàn)槠鋵?shí)際上改變的是懸架下橫臂的工作狀態(tài),調(diào)整懸架空間初始狀態(tài)的位置,并沒有改變懸架剛度曲線,只是改變了工作區(qū)間段。
從上面可以分析出對懸架剛度影響較大的參數(shù)有扭桿的直徑d和扭桿的有效長度Le。
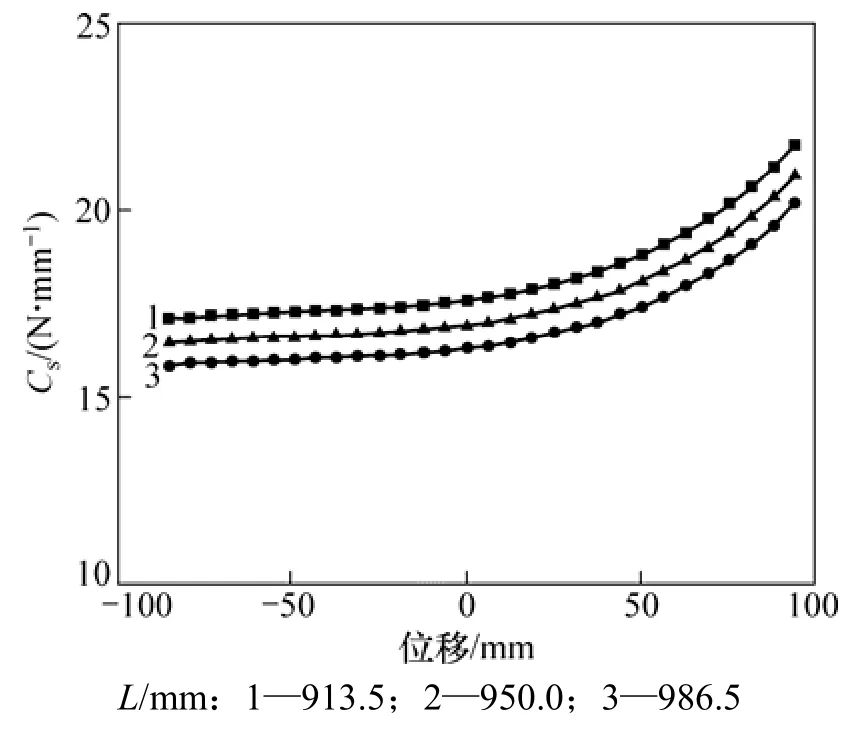
圖5 懸架垂向剛度隨扭桿長度變化曲線Fig.5 Stiffness curve of suspension with variable length
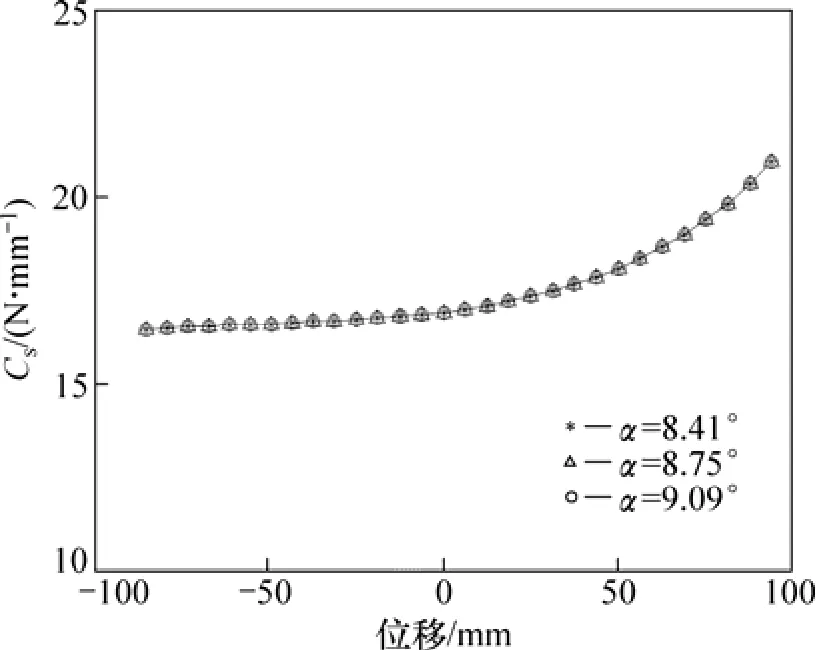
圖6 懸架垂向剛度隨預(yù)扭角度變化曲線Fig.6 Stiffness curve of suspension with variable angles
3 扭桿基本尺寸優(yōu)化數(shù)學(xué)模型的建立
在試車過程中前懸架偏軟,輪胎跳動過大,導(dǎo)致前輪定位參數(shù)變化比較明顯,車身高度變化較為突出。所以,本文以零載至空載和空載至滿載懸架垂向位移變化量作為優(yōu)化目標(biāo),同時兼顧輪胎動載荷與行駛舒適性參數(shù),優(yōu)化懸架剛度時選擇合適的扭桿直徑與有效長度。
3.1 懸架性能參數(shù)約束條件函數(shù)的建立
考慮車輛行駛的安全性和舒適性,建立評價指標(biāo)公式[7-8],分析懸架動行程參數(shù)。以頻域功率譜密度作為評價指標(biāo),引入新的目標(biāo)函數(shù)方法,分析空載(含駕駛員)、半載、滿載3種工況下的性能指標(biāo)[9]。
首先建立1/4車輛模型[10-14],如圖7所示。圖7中:h為路面輸入;k1和k2分別為懸架剛度和輪胎剛度;c1為懸架阻尼系數(shù);m1為車身質(zhì)量;m2為車輪質(zhì)量;x1為車身位移;x2為車輪位移。
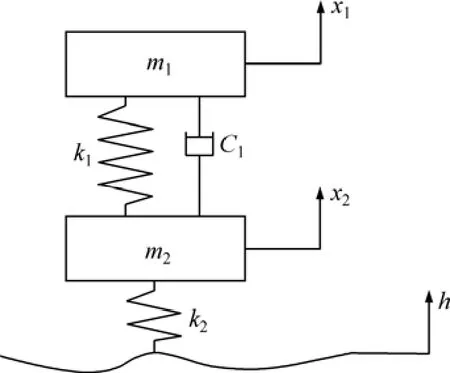
圖7 車輛1/4物理模型Fig.7 1/4 physical model of vehicle
建立相應(yīng)狀態(tài)空間方程:
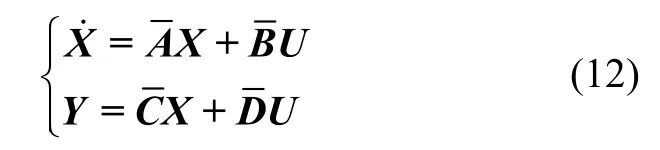
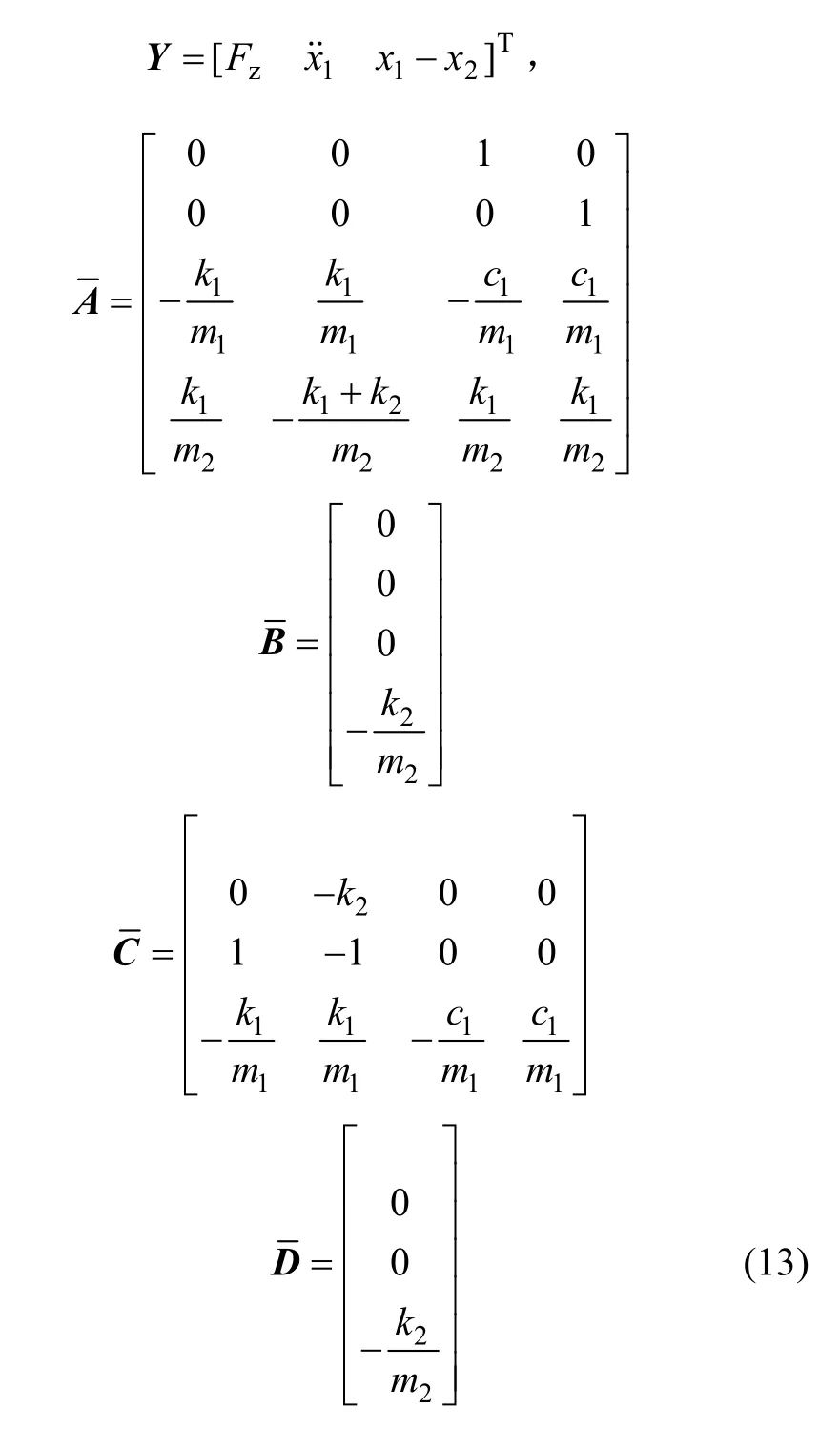
Fz為輪胎的動載荷。路面輸入h為路面譜密度函數(shù)[9]:

其中:Ω0為標(biāo)準(zhǔn)的行程圓頻率;Φh(Ω0)為路面不平度的尺度;w為波度性尺度。
考慮行駛地點(diǎn)為校園、旅游景點(diǎn),所以,路況較好。選擇Ⅱ級路面作為參考輸入,路面較平,跳動量比較小。其次,校園車速限速,速度較低。此處車速v設(shè)置為10 m/s。將路面譜行程功率譜轉(zhuǎn)化為時域功率譜[14]:

根據(jù)路面譜以及振動參數(shù)的幅頻特性求出評價指標(biāo)的標(biāo)準(zhǔn)差。
3.1.1 安全性
行駛安全性即輪胎動載荷Fz,定義為相對于靜平衡位置的輪胎載荷變化的均方根值,可衡量輪胎附著能力的指標(biāo)[15]。

其中:Fzj表示靜載荷。認(rèn)為當(dāng)激振頻率高于25 Hz時,車身振動不能視為剛體[15],故將積分上限圓頻率取值為 50π。
3.1.2 舒適性
對于轎車而言,舒適性可定義為垂向加速度的加權(quán)加速度均方根[15]:

由于隨機(jī)振動頻率很寬,比簡諧振動讓人更不舒服,所以,引入1個評價函數(shù)[15],如圖8所示。
BFoot=,為隨機(jī)修正系數(shù)[15],如表1所示。
本文數(shù)學(xué)模型中的振動分析主要集中在腳部z方向,根據(jù)上述圖標(biāo)選擇相應(yīng)的修正系數(shù)。
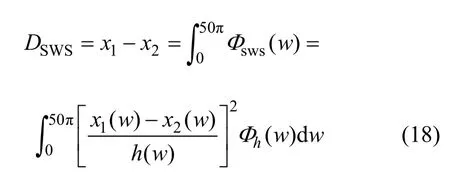
3.1.3 動行程
懸架動行程可定義為車輪與車身的位移之差的均方根[16],是指在載荷不變的情況下,由路面激勵引起的位移變化量。

表1 修正系數(shù)Table 1 Correction coefficients

圖8 振動評價指標(biāo)Fig.8 Evaluation value of vibration
3.2 目標(biāo)函數(shù)的確立
由于在試制過程中出現(xiàn)懸架跳動行程過大,車身高度變化較為明顯,所以,以如下2個參數(shù)作為目標(biāo)函數(shù)。
(1) 車輛載荷從零載至空載時,下球頭點(diǎn)垂向位移變化量為:

(2) 車輛載荷從空載至滿載時,下球頭點(diǎn)垂向位移變化量為:

3.3 約束條件函數(shù)的確定
(1) 根據(jù)總布置的空間布置決定扭桿縱置,在長度方向限制扭桿長度為:

(2) 由于距車架的下表面的高度的限制,所以扭桿直徑限制為:

(3) 為了便于加工,選取扭桿直徑為整數(shù)或者小數(shù)末位為5的數(shù)值;
(4) 扭桿材料采用 45CrNiMoVa優(yōu)質(zhì)合金鋼,經(jīng)過噴丸處理后,扭桿的許用應(yīng)力[σs]取 1 270~1 370 MPa;
(5) 輪胎動載荷變化Fz變化量盡量小;(6) 懸架舒適性參數(shù)KFoot變化范圍要求盡量小;(7) 懸架動行程變化DSWS變化較小,保證碰擊限位塊的可能性較小。
3.4 優(yōu)化結(jié)果
利用 Matlab非線性多目標(biāo)優(yōu)化工具箱求解得到優(yōu)化結(jié)果:扭桿直徑為 26.5 mm,扭桿有效長度為895 mm。
4 優(yōu)化后懸架性能參數(shù)結(jié)果分析
優(yōu)化前后性能參數(shù)如表2所示。由表2可知:
(1) 優(yōu)化前,當(dāng)懸架載荷從零載變化到空載時,主銷下球頭點(diǎn)垂向位移變化為77.5 mm,空載至滿載垂向位移變化為88 mm;優(yōu)化后,當(dāng)懸架載荷從零載變化到空載時,主銷下球頭點(diǎn)垂向位移變化為70 mm,從空載變化到滿載垂向位移為76.5 mm,垂向位移變化量分別減少9.67%和13.1%。
(2) 3個評價指標(biāo)輪胎動載荷的變化量為1.35%,舒適性參數(shù)變化量為 5.83%。而懸架動行程基本沒有變化。這主要是由于車輛行駛路面為校園道路,路況較好。
(3) 在基本不影響懸架性能情況下,有效減小懸架偏軟現(xiàn)象。
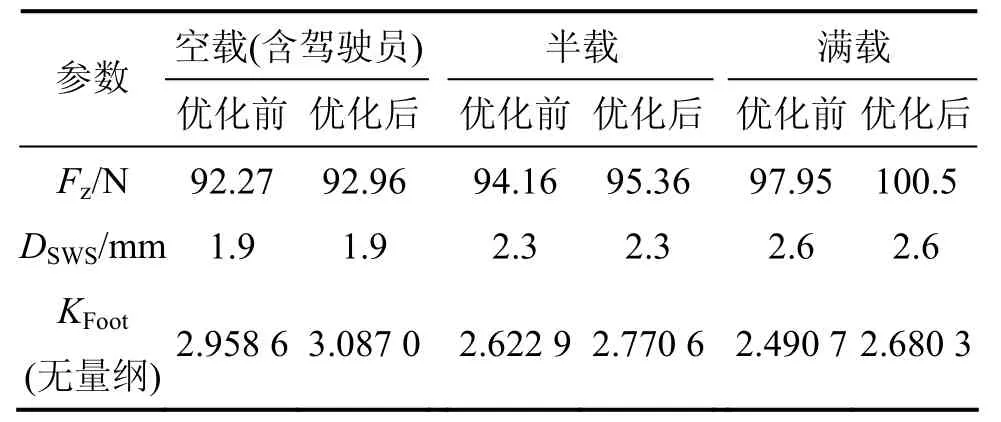
表2 優(yōu)化前后性能參數(shù)Table 2 Property parameter of before and after optimization
5 結(jié)論
(1) 利用矢量代數(shù),結(jié)合有限張量法和虛功原理用Adams軟件計(jì)算雙橫臂扭桿懸架的剛度,證明了數(shù)學(xué)計(jì)算方法的可行性;通過計(jì)算,分析扭桿基本參數(shù)對懸架剛度的影響,并進(jìn)行敏感度分析得到文中需要優(yōu)化的基本參數(shù)。
(2) 根據(jù)車輛實(shí)際行駛道路狀況,提出以輪胎動載荷、懸架動行程和舒適性參數(shù)作為約束條件,以懸架跳動量作為目標(biāo)函數(shù)和指標(biāo),建立雙橫臂扭桿懸架的扭桿基本尺寸的優(yōu)化模型。
(3) 通過Matlab多目標(biāo)優(yōu)化工具箱優(yōu)化扭桿基本尺寸,使懸架從零載至空載懸架垂向位移行程減少9.67%,空載至滿載垂向位移減少13.1%,有效增加了懸架剛度,減少了懸架限位塊經(jīng)常被碰擊的現(xiàn)象;同時,限制前輪定位角的變化,在不影響懸架性能的前提下有效改善了汽車前懸架偏軟的現(xiàn)象。
[1] 韓銳, 毛務(wù)本. 矢量代數(shù)在雙橫臂獨(dú)立懸架中運(yùn)動分析中的應(yīng)用[J]. 公路交通科技, 2003, 20(6): 139-142.HAN Rui, MAO Wu-ben. Vector algebra in kinematics analysis of the dual wishbone independent suspension[J]. Journal of Highway and Transportation Research and Development, 2004,34(4): 139-142.
[2] 岳驚濤, 陳定坤. 雙橫臂扭桿懸架的剛度計(jì)算及負(fù)荷特性分析[C]//中國汽車工程學(xué)會 2008年會論文集, 天津: 機(jī)械工業(yè)出片社, 2008: 300-303.YUE Jing-tao, CHEN Ding-kun. Stiffness calculation and load characteristic analysis of double wishbone independent suspension with torsion bar[C]//Proceedings of Society of Automotive Engineers China, 2008. Tianjing: China Machine Press, 2008: 300-303.
[3] 丁飛, 韓旭 .懸架導(dǎo)向機(jī)構(gòu)硬點(diǎn)靈敏度分析及多目標(biāo)優(yōu)化設(shè)計(jì)[J]. 汽車工程, 2010, 32(2): 138-142.DING Fei, HAN Xu. Hardpoints sensitivity analysis and multi-objective optimization of suspension guiding mechanism[J]. Automotive Engineering, 2010, 32(2): 138-142.
[4] 陳黎卿, 陳無畏. 雙橫臂扭桿獨(dú)立懸架多目標(biāo)遺傳優(yōu)化設(shè)計(jì)[J]. 中國機(jī)械工程, 2007, 18(17): 2022-2025.CHEN Li-qing, CHEN Wu-wei. Multi-objective heredity optimization design of torsion-bar wishbone suspension[J].Chinese Mechanical Engineering, 2007, 18(17): 2022-2025.
[5] 曾迥立. 雙橫臂獨(dú)立懸架線剛度的非圖解法計(jì)算[J]. 汽車工程, 2006, 28(8): 747-749.ZENG Jiong-li. A non-graphic method of calculation line stiffness of the double wishbone independent suspension[J].Automotive Engineering, 2006, 28(8): 747-749.
[6] 洪嘉振. 計(jì)算多體系統(tǒng)動力學(xué)[M]. 北京: 高等教育出版社,2009: 38-40.HONG Jia-zhen. Computational dynamics of multibody systems[M]. Beijing: Higher Education Press, 2009: 38-40.
[7] 寧國寶, 張立國. 雙橫臂扭桿彈簧懸架空間結(jié)構(gòu)非線性的建模與分析[J]. 汽車工程, 2010, 32(2): 143-147.NING Guo-bao, ZHANG Li-guo. Modelling and analysis of nonlinear characteristics of spatial structure in double wishbone suspension with torsion bar[J]. Automotive Engineering, 2010,32(2): 143-147.
[8] 時培成, 韋山. 雙橫臂扭桿彈簧懸架剛度計(jì)算及動態(tài)仿真[J].機(jī)械工程師, 2006(8): 43-45.SHI Pei-cheng, Wei Shan. Simulation and calculation of the double wishbone suspension with torsion bar[J]. Mechanical Engineers, 2006(8): 43-45.
[9] 唐應(yīng)時, 柴天. 基于接觸摩擦的少片變截面鋼板彈簧的剛度分析[J]. 中南大學(xué)學(xué)報(bào): 自然科學(xué)版, 2009, 40(3): 693-698.TANG Ying-shi, CHAI Tian. Analysis of stiffness of taper leaf spring based on contact frication[J]. Journal of Central South Univerity: Science and Technology, 2009, 40(3): 693-698.
[10] 蘭波, 喻凡. 車輛主動懸架 LQG控制器的設(shè)計(jì)與仿真分析[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2004, 35(1): 13-17.LAN Bo, YU Fan. Design and simulation analysis of LQG controller of active suspension[J]. Transaction of the Chinese Society for Agricultural Machinery, 2004, 35(1): 13-17.
[11] Liu Z, Angeles J. Least-square optimization of planar and spherical four-bar function generator under mobility constraints[J]. ASME: Journal of Mechanical Design, 1992,114(4): 569-573.
[12] Suh C H. Synthesis and analysis of suspension mechanisms with use of displacement matrices[C]//Proceedings of Society of Automotive Engineers, USA, 1989: 189-200.
[13] Ramon Sancibrian, Pablo Garcia. Fernando Viadero. Suspension system vehicle design using a local optimization procedure[C]//In Proceeding of ASME (2005) 29th International Design Engineering Technical Conference. California, 2005:227-236.
[14] Rao S S. 機(jī)械振動[M]. 4版. 李欣業(yè), 張明路, 譯. 北京: 清華大學(xué)出版社, 2009: 644-672.Rao S S. Mechanical vibration[M]. 4th ed. LI Xin-ye, ZHANG Ming-lu, trans. Beijing: Tsinghua University Press, 2009:644-672.
[15] Mitschke M. 汽車動力學(xué)[M]. 陳蔭三, 余強(qiáng), 譯. 清華大學(xué)出版社, 2009: 259-274.Mitschke M. Vehicle dynamic study[M]. CHEN Yin-san, YU Qiang, trans. Beijing: Tsinghua University Press, 2009:259-274.
[16] ISO 2631. Guide for the evaluation of human exposure to Whole-body Vibrations[S].
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
