和諧號動車組常用制動的控制模式
2011-08-03 11:54:58姜巖峰曹宏發
鐵道機車車輛 2011年5期
陳 亮,姜巖峰,尹 方,曹宏發,章 陽
(1 唐山軌道客車有限責任公司,河北唐山063035;2 中國鐵道科學研究院 機車車輛研究所,北京100081)
制動系統是和諧號動車組高速運行的安全保障。列車高速運行時具有相當大的運動能量,而高速列車的制動系統必須解決列車動能的快速轉換和能量消耗問題,并在輪軌黏著允許的條件下,做到高速列車的可靠制動停車或降速。另外,由于輪軌黏著系數隨運行速度的提高而下降,更增加了高速制動技術的難度。為此,和諧號動車組的制動系統采用了以下技術:
(1)空電復合制動方式。由于高速列車所需的制動能量巨大,為此高速列車均采用了多種制動方式組合的復合式制動方式。除最基本的空氣制動外,常見的有再生制動、電阻制動、渦流制動、磁軌制動、風阻制動等。和諧號動車組采用的是技術成熟的再生制動和空氣制動的復合制動方式。在動車上配置再生制動和空氣制動,在拖車上只有空氣制動。列車制動時優先采用再生電制動,再生電制動不足時補充空氣制動。
(2)直通式電空制動系統。隨著列車速度的提高,為了提高操縱靈敏度,縮短空走時間,各種高速列車基本都采用了電空制動控制系統,從而達到制動、緩解快,停車平穩的目的。和諧號動車組采用電氣指令直通式電空制動控制系統,以微處理機為控制中心,由制動控制單元發布電氣指令,通過EP電空單元使制動缸動作,產生空氣制動。當制動施加或緩解時,制動系統的微處理機可以通過電氣指令對制動過程的沖動進行控制,從而提高旅客的乘坐舒適度,和諧號動車組的沖動值控制在0.75m/s3以內。
(3)列車網絡。和諧號動車組采用了標準的列車級網絡和車輛級網絡,對于制動系統來說,列車網絡具有兩種作用,第一可以通過列車網絡傳遞制動系統的控制指令和設備狀態,從而可以實現制動系統的各種控制功能;第二可以通過列車網絡和列車上的其他系統設備進行交互,如CCU,TCU,ATP等,從而列車連鎖控制,保證列車的安全運行。
1 常用制動的控制原則
1.1 常用制動指令的處理
列車運行的時候,常用制動的指令來源可能有以下幾種:列車控制系統、ATP、自動速度控制設備、司機制動手柄等。以上設備的指令被制動系統處理為不同的制動級別,級別越大對應的減速度也越大。由于列車輪軌間的黏著系數隨著速度變化而變化,為了保證制動減速度不超過輪軌的黏著極限,制動系統可以根據當前的車輛速度確定合適的減速度值。速度、級別和減速度的關系可以繪制成為減速度曲線。
1.2 制動力分配方法
因為列車編組中有動車也有拖車,其采用的制動方式也不同,因此制動時需要在各車之間進行協調。常用的方式有均衡制動控制和電制動力優先控制。
均衡制動控制是各車輛承擔自身的所需制動力的控制方式。此時,動車優先使用電制動力,不足的部分采用空氣制動力,拖車采用空氣制動力。因此拖車的閘片磨耗要比動車大。
電制優先控制是優先利用動車的再生制動。當動車的再生制動力達到最大值之前,基本不使用空氣制動;當再生制動力不足時由拖車的空氣制動來承擔;當制動力需求更大時,在不超過黏著極限的情況下再用動車的空氣制動補充。
1.3 單車制動力丟失的處理
當列車中的某一輛車制動設備故障時,其應該承擔的部分制動力需要在全列車范圍內重新分配。此時采用全列車復合制動的原則,列車中每一輛制動裝置運轉正常的車輛都要承擔附加的制動力,使全列車范圍內制動力保持不變,從而保證列車能夠按照預想的減速度制動停車。
2 CRH3動車組制動控制系統
2.1 配置簡介
和諧號動車組由多個牽引單元組成,每個牽引單元由功能不同的車輛組合而成。以8輛編組的CRH3動車組為例,一個動車組列車包含2個牽引單元。每一個牽引單元包含4輛車,分別為端車(EC01)、變壓器車(TC02)、變流器車(IC03)、中間車(BC04)。其中端車和變流器車是動車,變壓器車是拖車,每輛車上都配備有制動系統。動車上包含兩種制動裝置,電制動和空氣制動,拖車上只有空氣制動。制動系統的控制部分稱為制動控制單元(BCU),可以根據制動指令和當前車輛的配置狀況,控制電制動和空氣制動裝置。
以CRH3動車組制動系統配置為例,每個牽引單元的制動系統配置如圖1所示。從圖1中可以看出,在每個牽引單元中裝備了7臺BCU,其中BCU1.2和BCUx.1參與常用制動的控制,BCU2.2和BCU4.2用于車輪抱死監測。牽引單元各BCU之間通過MVB總線通信;為了和其他牽引單元的BCU通信,在MVB網絡和WTB網絡之間加入了網關,通過WTB總線進行通信。通過WTB/MVB兩級網絡,實現了全列車BCU之間的數據交換。
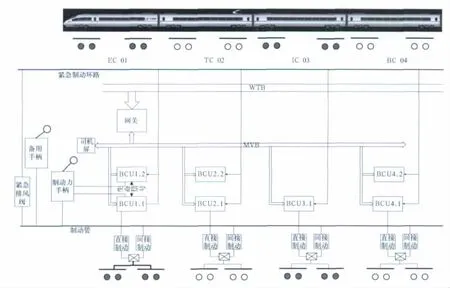
圖1 CRH3動車組制動系統配置
2.2 常用制動相關設備
在制動系統中,每個設備都有其特定的功能,各個設備之間按照功能劃分進行協作,共同完成制動指令在全列范圍內的傳遞和執行。此外,制動系統工作時候還需要其他系統的相關設備提供必要的信息和指令,如CCU、TCU等。整個制動系統設備功能分布如圖2制動系統指令層次圖所示,以下將對相關設備進行簡單介紹。
(1)局部BCU
局部 BCU 包 含 BCU1.1,BCU2.1,BCU3.1,BCU4.1。以上BCU的作用是計算本車的最大可用空氣制動力、當前空氣制動實際發揮能力以及其他狀態信息,通過MVB網絡將數據發送至SBM,并從SBM接收制動指令,直接控制本車的空氣制動設備,產生制動力。
(2)分段制動管理器(SBM)
SBM的功能是段管理,主要是收集本牽引單元內制動系統相關設備的信息,匯總后向TBM匯報,同時從TBM獲取指令,并分發到本網段內各個相關的設備。SBM收集的消息包括每個BCU能夠發揮的最大空氣制動力和實際空氣制動力,每個TCU的最大可用電制動力等。
只有端車內的BCU1.1和BCU1.2可以作為SBM,在一個牽引單元內,同一時間只能有一臺BCU激活成為SBM。兩臺BCU之間可進行工作狀態交換,當其中一方工作不正常的時候,另外的一臺BCU可以成為SBM,從而保證了制動系統的可靠工作。
(3)列車制動管理器(TBM)
TBM控制并協調列車的所有常用制動系統。當有制動指令時,TBM計算當前車輛所需要的總制動力,并匯總各個SBM發送過來的可用電制動力和空氣制動力,按照一定的方法計算得到當前電制動力和空氣制動力的指令,并通過WTB/MVB網絡發送到SBM。
當司機室的控制功能激活時,所在端車的BCU1.1或BCU1.2會成為TBM,每一列車只能有一個BCU成為TBM。在當前的TBM有的情況下,另外的一臺BCU可用通過生命信號獲取到這一狀態,并取代故障BCU成為TBM。當BCU成為TBM的時候,同時BCU也是SBM。
(4)牽引控制單元TCU
牽引控制單元收集當前牽引裝置能夠發揮的最大電制動力和實際發揮的電制動力,上報至SBM。并從SBM獲取當前TBM分配給電制部件的制動力指令,施加電制動力。
(5)中央控制單元CCU
CCU是整個列車運行的管理者,每一個牽引單元中都有一個CCU。BCU從CCU獲取當前列車的配置如牽引單元的個數、當前牽引單元的編號、當前列車速度、制動指令等。

圖2 制動系統指令層次圖
2.3 常用制動控制流程
在運行過程中,制動系統實時的執行3個主要任務,①制動狀態的收集;②制動指令的獲取;③制動指令的分發和執行。如圖3常用制動的基本流程所示。

圖3 常用制動的基本流程
(1)制動指令獲取
常用制動指令來源有3個,①制動力控制手柄;②ASC;③最大常用制動指令。TBM作為制動控制的列車級設備,統一接收上述常用制動指令。
制動手柄是最常用的制動指令來源,通過制動手柄獲取的是對列車減速度的要求。手柄總共有9個制動級別,從1A到FSB(最大常用制動),制動減速度依次提高。在最大常用制動時平均減速度為0.8~1.0m/s2。由于列車輪軌間的黏著系數會隨著速度的增加而減小,因此需要制動系統根據當前列車的速度實時計算需要的減速度。制動減速度和速度之間的對應關系可以繪制成為減速度曲線,手柄級別和列車速度與制動力之間的關系如圖4所示。圖中N2表示常用制動2級,FSB表示最大常用制動。獲取到減速度指令后,TBM會做相應計算,并把指令發送到全列制動設備。
ASC(自動速度控制)是列車的一個重要功能,司機可以使用定速手柄控制列車速度。此時,制動手柄必須處于緩解位,TBM通過網絡獲取ASC發給空氣制動部件和電制動部件的制動指令,并將該指令轉發至全列。
此外,制動系統還接收來自CCU的FSB指令。當CCU根據當前的列車狀態,判斷需要快速停車保證安全時,會向制動系統發出FSB命令。TBM接收到FSB命令后,會根據減速度曲線中的數據計算減速度,并生成制動指令傳送至全列車制動設備。

圖4 手柄級別和列車速度與制動力之間的關系
(2)車輛可用制動力計算
列車運行時,安裝在每輛車上的BCU會計算當前車輛的質量和能夠發揮的最大空氣制動力和電制動力,此項工作主要由局部的BCU和TCU進行。
本車可用制動力的計算需要考慮車重,為了獲取車輛的質量,制動系統安裝了壓力傳感器監測空氣彈簧的空氣壓力。車輛質量的變化可以實時的反應到空氣彈簧的壓力上,因此通過監測壓力傳感器的壓力值,可以計算當前車輛的質量。當壓力傳感器信號故障時,則使用最大車輛質量的2/3作為默認的質量。
車質量確定以后,局部BCU和TCU在計算可獲得的最大制動力時還要考慮以下幾個因素:制動盤的熱負荷、最大黏著力、直接制動的可用性。為了保證制動盤在高速階段制動時不產生過熱問題、制動力不超過輪軌黏著力,制動設備上安裝了電磁閥用來控制制動系統輸出的空氣制動力。當列車運行在高速階段或者動車的電制動力可用,則制動設備輸出較低的制動力。
當車輛可用制動力計算完成后,對拖車來說本車可用的空氣制動力就等于車輛可用制動力。對動車來說,如果電制動力可用,則電制動力可用值等于TCU計算的可用值,空氣制動力可用值等于車輛可用制動力減去電制動力可用數值。
(3)制動力分配
TBM根據當前的目標減速度a和匯總后的列車質量m,根據公式:
可以算出目前全列車的目標制動力,然后TBM會根據一定的制動力分配策略將制動力在全列車范圍內進行分配。
常用制動的制動力分配分為3種子模式:正常模式、比例模式和清掃模式。正常模式對應的是電制動優先的模式,比例模式對應的是均衡控制模式。
通過按動制動控制手柄上的模式按鈕,可以在3種子模式之間進行轉換,3種子模式的轉化關系如圖5所示。

圖5 3種子模式的轉化關系
在正常模式下,按照以下順序進行分配:
(1)動車的電制動力;(2)拖車的空氣制動力;(3)動車的空氣制動力。
比例模式下,TBM將在所有的軸上施加相似的制動力,以獲得相同的黏著系數。這樣可以在較差的黏著條件下改善制動性能。
清掃模式主要是融化制動盤上的冰雪以及清潔制動盤,此時僅使用空氣制動,并在制動盤上施加相同的制動力。
(4)制動指令的傳遞途徑
制動指令的傳輸主要通過SBM實現的。制動過程中,單元內的BCU和TCU將本車可用的空氣制動力、電制力、車質量等信息發送到 MVB網絡上,SBM的將上述信息匯總后發送到MVB上,然后通過網關轉發后經WTB網絡到TBM所在的牽引單元并被TBM接收。
TBM對制動力進行分配后,將分配信息發送到MVB網絡上,網關將分配信息經WTB網絡發送到其他的牽引單元,被相應的SBM接收后,進行轉換并在此發送到MVB網絡被局部的BCU和TCU接收并執行,從而完成制動。
3 結論
綜上所述,和諧號動車組的常用制動特點如下:(1)和諧號動車組制動系統采用再生電制動力和空氣制動力相結合的復合制動方式。
(2)采用標準的列車網絡作為常用制動執行和信息的傳遞通道,提高了制動系統的操作靈敏度。
(3)通過車輛、列車兩級網絡實現了在不同的牽引單元間制動設備的相互協作,通過對制動設備功能的合理劃分,實現了牽引單元級別和列車級別的制動控制,保證了各種條件下全列車制動力的穩定施加。
(4)通過對關鍵控制設備的冗余配置,提高了制動系統運行時的可用性。
[1]錢立新.世界高速鐵路技術[M].北京:中國鐵道出版社,2003.
[2]彭俊彬.動車組牽引與制動[M].北京:中國鐵道出版社,2007.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00
