三維激光點云與序列數(shù)碼影像配準方法的研究
2011-08-10 04:46:54劉善勇
城市勘測 2011年4期
劉善勇
(中鐵第四勘察設計院集團有限公司,湖北 武漢 430063)
1 引言
激光雷達能夠快速獲得地物的三維點坐標,并返回地物反射信號的強度,但是卻難以獲得地物的光譜信息,這給三維激光點云數(shù)據(jù)的處理和理解帶來了很大困難。為了解決這個問題,可利用數(shù)碼相機對被測物體拍攝若干照片,利用數(shù)碼影像豐富的光譜信息來彌補三維激光點云的不足。數(shù)碼影像能夠彌補三維激光點云不足的難點是怎樣精確地配準兩種數(shù)據(jù),即準確確定出三維激光點云點在相應數(shù)碼影像上的像素坐標。為了解決這個問題,目前主流商用處理三維激光點云的軟件多采用單片直接線性變換的方法。該方法的局限性是需要提供大量的三維激光點云與影像的同名點(每張影像至少需要提供6對),生產(chǎn)效率和自動化程度較低。為此,本文提出基于數(shù)字微分糾正的三維激光點云與序列影像進行配準的方法。
2 三維激光點云與序列數(shù)碼影像配準算法綜述
本文配準三維激光點云與序列數(shù)碼影像的流程是通過序列影像間的立體像對匹配,得到同名點,自動對序列影像定向和模型連接,并將前方交會生成的模型點云配準到三維激光點云上,解算出兩個點云之間的變換關系,再利用變換關系解算各影像在三維激光點云坐標系的外方位元素初值。對序列影像進行光束法平差,解算出影像在三維激光點云坐標系下的外方位元素精確值。已知影像的外方位元素及相機參數(shù)后,就可以精確地將三維激光點云點投影到影像上。從而實現(xiàn)了三維激光點云與序列影像的配準。該方法實際是通過自動解算影像間的關系,將序列影像整體與三維激光點云進行配準,只需提供3對三維激光點云與序列影像的同名點(在任意兩張序列影像中已知像素坐標的三維激光點云點),從而減少了人工干預,提高了生成效率和自動化程度
具體算法流程是:
(1)對攝取的序列影像進行畸變校正,得到畸變改正參數(shù),用于消除由數(shù)碼相機鏡頭畸變產(chǎn)生的像點坐標誤差。
(2)對立體像對進行匹配,得到影像間的同名點。
(3)對序列影像進行相對定向和模型連接。
(4)將立體匹配得到的同名點通過前方交會得到由影像生成的點云。
(5)通過至少3對三維激光點云與序列影像的同名點,求出由影像生成的點云與三維激光點云之間的空間相似變換關系。
(6)利用變換關系解算出影像在三維激光點云坐標系下的外方位元素初值。
(7)對所有影像進行光束法平差,整體解算出影像在三維激光點云坐標系下的外方位元素精確值。
三維激光點云與多張連續(xù)數(shù)碼影像配準算法流程圖如圖1所示。
3 影像與三維激光點云同名點的選取
如何快速且盡量少的提供三維激光點云與影像的同名點是提高數(shù)碼影像與三維激光點云配準工作效率和自動化程度的關鍵所在。本文算法對于一組序列影像只需要提供3對三維激光點云與序列影像的同名點,解決了“少”的問題,然而“快”的問題仍是一個亟待解決的問題。目前,主流軟件提供三維激光點云與數(shù)碼影像的同名點的方式都是在影像與三維激光點云上人工選取。影像具有豐富的紋理信息,選取特征點難度不大。由于三維激光點云缺乏紋理特征,難于辨識,所以如何獲得一種讓操作者易于尋找特征的顯示三維激光點云的方式是解決問題的關鍵。筆者通過大量實驗與測試,總結出如下幾種解決方案:
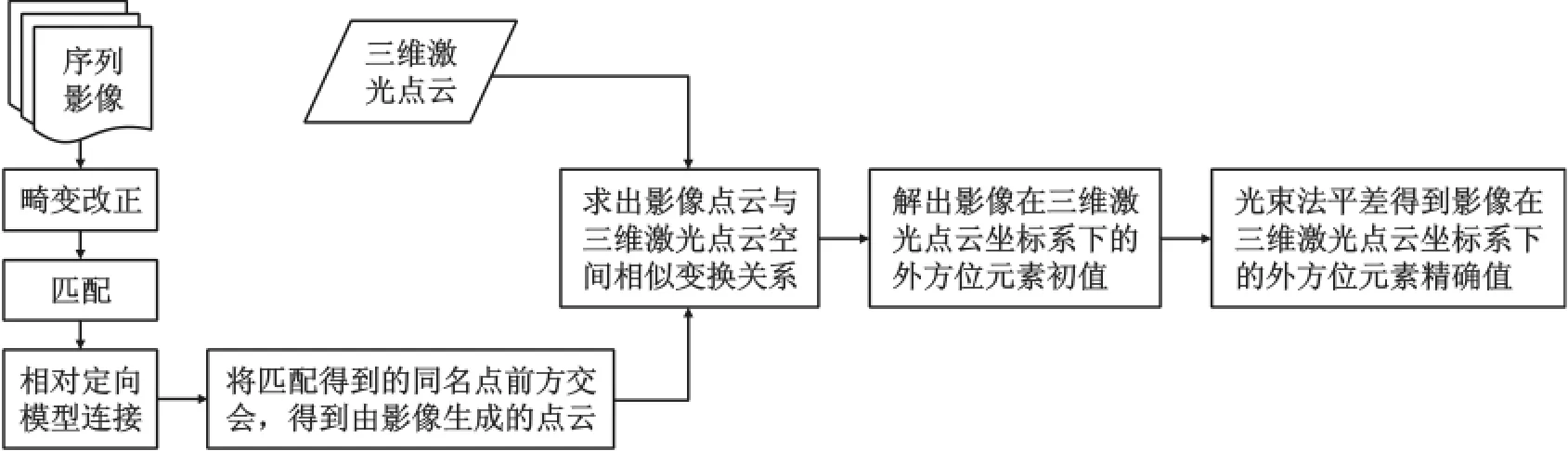
圖1 三維激光點云與多張連續(xù)數(shù)碼影像配準算法流程
(1)在三維界面中顯示三維激光點云。此種方式最為普通,但也是通用性最強的。
(2)對于具有強度信息的三維激光點云,可以用強度信息來渲染三維激光點云。此種方式相對于第一種方式大大減輕了人的疲勞度,而且一般的三維激光點云都有強度信息,其通用性較強。
(3)對于航空三維激光點云由于其坐標系較為固定,可以將三維激光點云豎直投影到XY平面上,而根據(jù)其高程值的不同,分色顯示,或者顯示三維激光點云的強度信息。此種方法對于航空三維激光點云較為適用,對于地形起伏較大,強度信息豐富的地方,該方法比(1)、(2)方法適用。缺點是要進行一個投影處理。圖2顯示了幾種方法的顯示效果。
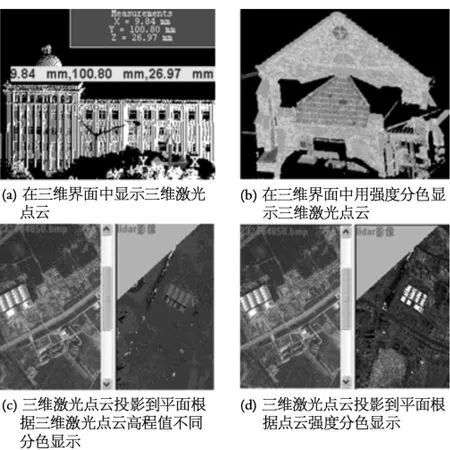
圖2 顯示三維激光點云方式
4 基于四元數(shù)的絕對定向
相對定向與模型連接結束后建立起的是像空間輔助坐標系中的航帶模型。只有對三維激光點云與航帶模型進行空間相似變換,解求出二者的變換關系(即兩個模型所在坐標系的平移旋轉(zhuǎn)關系以及模型之間的縮放系數(shù)),才能解算出影像在三維激光點云坐標系中外方位元素,這一過程在攝影測量中稱為絕對定向。在經(jīng)典攝影測量學中,傳統(tǒng)的絕對定向方法都是迭代解法,需要提供比較準確的初始值。但在某些情況下,良好的初值并不容易獲得。本文利用單位四元數(shù)描述坐標系的旋轉(zhuǎn)關系[2],不需初值和迭代即可進行絕對定向的直接解算。
5 實驗結果分析
5.1 配準精度分析
本實驗針對機載三維激光點云和地面三維激光點云與連續(xù)數(shù)碼影像的配準分別進行了測試。實驗中將三維激光點云反投影到圖像上驗證了結果的正確性。
實驗一,對山西太原城區(qū)的機載激光掃描數(shù)據(jù)和航空影像進行配準,飛機同時搭載POS系統(tǒng),可以提供拍攝影像時相機的外方位元素。圖3中(a)是根據(jù)POS系統(tǒng)提供的影像外方位元素將三維激光點云數(shù)據(jù)投影到影像上的情況(b)是根據(jù)本文方法計算得到外方位元素將三維激光點云數(shù)據(jù)投影到影像上的情況,從房屋輪廓的配準情況可以看出本文所獲得的外方位元素精度高于POS系統(tǒng)測量的。
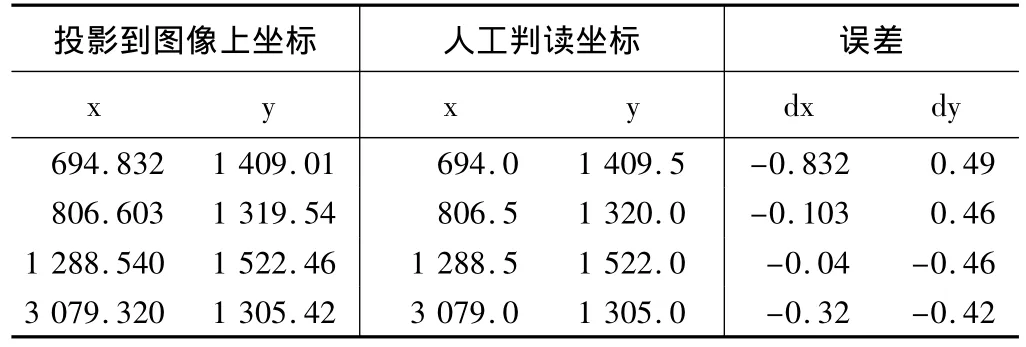
實驗中共選取14對序列影像與三維激光點云同名點,4對作為控制點,其余10對作為檢查點,檢查點反投影誤差統(tǒng)計情況如表1所示,通過計算,檢查點反投影點位中誤差為0.572個像素。
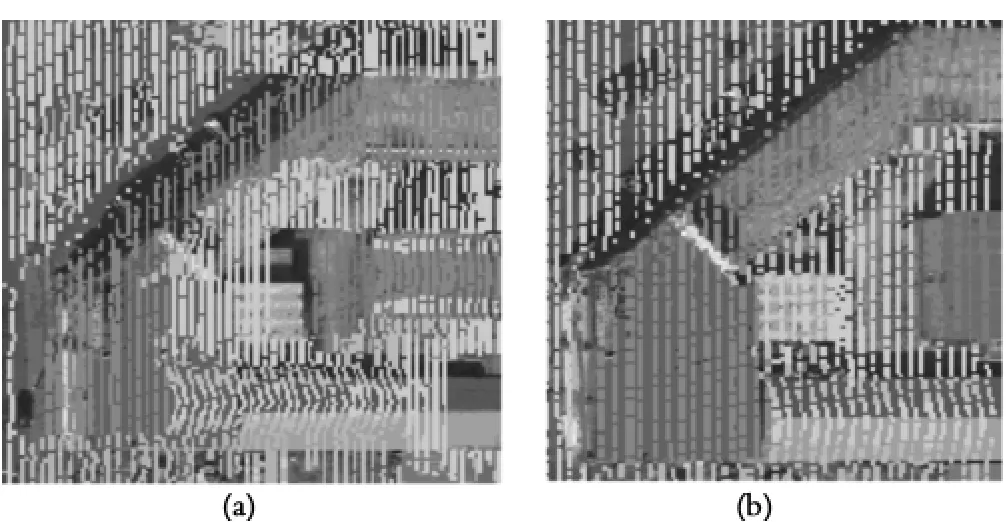
圖3 機載三維激光點云投影與序列影像配準(三維激光點云點顏色不同代表高程不同)
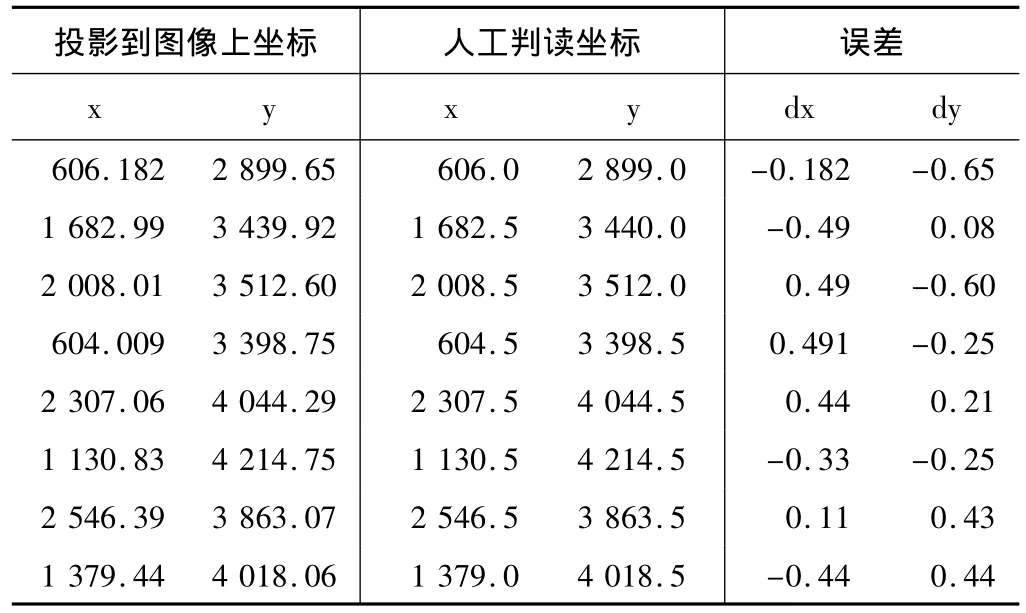
實驗一檢查點反投影誤差統(tǒng)計表 表1
實驗二,對武漢大學信息學部教學樓的地面激光掃描儀數(shù)據(jù)與數(shù)碼影像進行配準。圖4是用本文方法實現(xiàn)三維激光點云與序列影像(兩個圖為一組立體像對)配準效果。
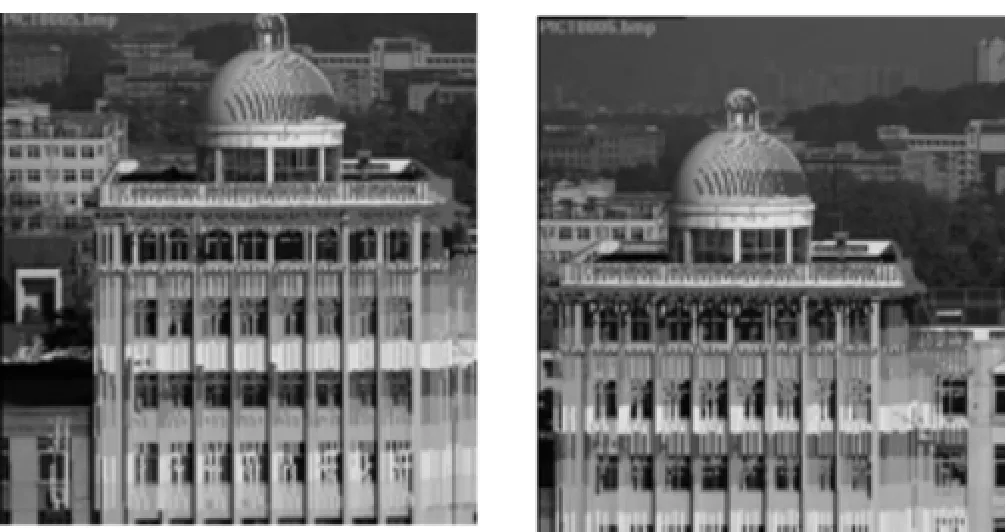
圖4 地面三維激光點云與序列影像配準(圖中激光點按照高程段分色顯示,例如:高程為20 m~21 m的激光點顏色為藍色)
由于本實驗中的地面激光點云比較難精確辨識特征,且本文目的是在少量控制點的輔助下實現(xiàn)激光點云與序列數(shù)碼影像配準。實驗中共選取8對影像與三維激光點云同名點,4對作為控制點,其余4對作為檢查點,檢查點反投影誤差統(tǒng)計情況如表2所示,通過計算,反投影坐標中誤差為0.642個像素。
實驗二檢查點反投影誤差統(tǒng)計表 表2
5.2 配準效率分析
制約三維激光點云與數(shù)碼影像配準效率的關鍵因素是影像與三維激光點云同名點的選取速度。為了測試本文算法的效率,分別對上文的實驗一與實驗二與Leica公司的Cyclone軟件進行對比,對比結果如表3所示。為方便說明,本文算法所需的在兩張影像上已知像素坐標的同名點記為S_GCP,單片直接線性變換所需的單張影像與三維激光點云的同名點記為GCP。
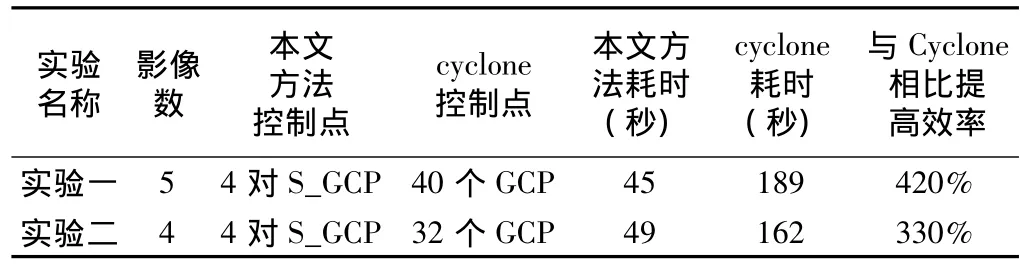
配準效率分析 表3
從表中可以看出本文方法對于一組序列影像所需控制點與影像數(shù)量無關。一組序列影像選取控制點耗時與用Cyclone做一張影像與三維激光點云配準選取8個控制點時間相當。由此我們得出結論:本文算法大大提高了三維激光點云與序列影像的配準效率,應用本文算法人工操作耗時與影像數(shù)量無關,只相當于單片線性變換一張影像耗時。序列影像數(shù)量越多,本文算法優(yōu)勢越明顯。
6 結語
本文提出的方法既可應用于機載三維激光點云與航空影像的配準,也可以應用于地面三維激光點云與數(shù)碼影像的配準。與目前主流的單片直接線性變換配準方法相比,減少了人工干預,提高了三維激光點云與數(shù)碼影像配準的生產(chǎn)效率和自動化程度。本文中對影像的處理是基于經(jīng)典的攝影測量理論,研究已經(jīng)非常成熟,因此該方法理論基礎嚴密,通用性強。實驗證明,該方法行之有效。
[1]張祖勛,張劍清.數(shù)字攝影測量學[M].武漢:武漢測繪科技大學出版社,1996[2]江剛武,王凈,張銳.基于單位四元數(shù)的絕對定向直接解法[J].測繪科學技術學報,2002,24:193~195
[3]馬頌德,張正友.計算機視覺[M].北京:科學出版社,1998
[4]李德仁,袁修孝.誤差處理與可靠性理論[M].武漢:武漢大學出版社,2002
[5]王光明,張明燕,劉文斌.數(shù)碼航攝影像在攝影測量中的應用[J].地理空間信息,2008(6):43~45
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
兒童故事畫報(2019年5期)2019-05-26 14:26:14
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
