雙基多輸入多輸出雷達快速目標空間定位算法
2011-08-21 12:39:04郭藝奪張永順童寧寧
電波科學學報 2011年3期
關鍵詞:信號
郭藝奪 張永順 童寧寧 沈 堤
(空軍工程大學導彈學院,陜西三原713800)
1.引 言
受多輸入多輸出(MIMO)通信發展及綜合脈沖孔徑雷達(SIAR:Synthetic Impulse and Antenna Radar)的啟發以及雷達對新理論和新技術的需求,Fishler等人提出了MIMO雷達[1-2]的概念。MIMO雷達使用多個發射天線同時發射相互正交的信號波形照射目標,并使用多個接收天線接收目標反射的信號。因此,與MIMO通信系統類似,MIMO雷達系統對于目標的雷達散射截面(RCS)起伏不敏感,具有很好的目標檢測性能[3]。此外,MIMO雷達可以實現靈活的發射信號波形設計[4],具有高分辨率的空間譜估計性能[5]。MIMO雷達的概念和信號處理技術受到了越來越多的關注。
MIMO雷達模型按發射陣列和接收陣列之間的配置方式可分為兩大類:單基地MIMO雷達和雙/多基地MIMO雷達。由于雙基地MIMO雷達的回波信號中包含了目標相對于發射和接收陣列的角度信息,因此,可通過估計目標相對于發射和接收陣列的角度來實現對目標的交叉定位。針對雙基地MIMO雷達的發射和接收角的估計,國內外學者提出了一些方法。文獻[6]采用多信號分類(MUSIC)算法來估計目標相對于發射陣的發射角和接收陣的接收角,但需要二維譜峰搜索;文獻[7]基于Capon(Minimum Variance Distortionless Response高分辨方位估計)方法實現了雙基地MIMO雷達二維方位角的估計,該方法假設反射因子是任意的,且同樣需要二維譜峰搜索;文獻[8]采用旋轉不變子空間方法把雙基地MIMO雷達的二維方位角參數同時估計問題轉化為兩個一維方位角參數估計問題,分別采用兩次信號參數估計(ESPRIT)方法同時估計出目標相對發射和接收陣列的方位角,不需要二維譜峰搜索;文獻[9]中提出了一種雙基地MIMO雷達的目標發射角和接收角聯合估計的算法,該方法采用ESPRIT方法獲得了目標發射角和接收角的閉式解,并可實現參數的自動配對。但以上算法都需要多周期目標回波才可實現對角度的正確估計,且上述算法都只考慮了目標相對于發射和接收陣列的一維角,因而不能實現對目標的空間定位。
文中基于雙基地MIMO雷達系統,提出了一種快速的多目標空間定位算法。文中建立了雙基地MIMO雷達的信號模型,并通過理論推導導出了目標空間坐標的閉式解。該算法避免了數據協方差矩陣的估計,不需要多維譜峰搜索和參數配對,在保證參數估計性能的基礎上,降低了算法的計算量。
2.雙基地MIMO雷達信號模型
考慮一發射和接收陣列均采用L型配置的雙基地MIMO雷達系統,其中發射陣元數為3,分別位于坐標原點、X軸和Y軸上,各發射陣元同時發射同頻相互正交的相位編碼信號,即滿足

且i,j=1,…,3,L為在每個發射信號重復周期內的相位編碼個數;接收陣元總數為Mr(Mr=Mr1+Mr2+1,其中位于X軸上的接收陣元數為M r 1,位于Y軸上的接收陣元數為Mr2,位于接收陣原點的陣元數為1),且發射和接收陣元間距均為λ/2(λ為載波波長)。設發射陣和接收陣之間的基線距離為D,且滿足D?λ,并假設在雷達系統的遠場同一距離單元內存在N個目標,其與發射陣的X軸,Y軸和Z軸正方向的夾角為αti,βti,γti,與接收陣的 X 軸,Y′軸和Z′軸正方向的夾角為 αri,βri,γri(i=1,2,…,N),且 αti,βti,αri,βri ∈[0,π),γti,γri∈[0,π/2),如圖1所示。可以證明 αti,βti,γti,αri,βri,γri滿足如下關系


圖1 雙基地MIMO雷達模型
因此,位于X軸和Y′軸的接收陣列的單周期回波信號可分別表示為
式中 :Axr=[axr(αr1),…,axr(αrN)],axr(αri)為位于X軸的接收陣列對應于第i個目標的導向矢量,a xr(αri)=[1,exp(-jπcosαri), …,exp(-jπMr1 cosαri)]T;A yr=[a yr(βr1),…,a yr(βnN)],a yr(βri)為位于Y軸的接收陣列對應于第i個目標的導向矢量 ,ayr(βri)=[1,exp(-jπcosβri),…,exp(-jπMr2cosβri)]T;A t=[a t(αt1,βt1),…,a t(αtN,βtN)],a t(αti,βti)為發射陣列對應于第i個目標的導向矢量,a t(αti,βti)=[1,exp(-jπcosαti),exp(-jπcosβti)]T;ε=[ε1,…,εN],εi是與第 i個目標的 RCS 相關的復數,diag(ε)表示由矢量ε形成一對角陣;S(l)=[s1(l),s2(l),s3(l)]T為發射信號矢量;Nx(l)和Ny(l)為加性高斯白噪聲。上標T表示矩陣的轉置。
3.所提算法
3.1 虛擬陣列的形成
因為MIMO雷達發射信號是相互正交的,所以用位于X軸和Y軸的陣列接收數據分別與3個發射信號進行匹配濾波,即可得到6個與發射信號相對應的虛擬陣列
式中 :D1=diag{[exp(-jπcosαt1),…,exp(-jπcosαtN)]};D2=diag{[exp(-jπcosβt1),…,exp(-jπcosβtN)]};Q xi=1/L(l)(i=1,2,3)為各虛擬陣列的噪聲,且均為高斯白噪聲;上標*表示取共軛。
3.2 目標角度的估計
由式(4~9)可以看出:對于各虛擬陣列來說,目標信號是完全“相干”的。因此,要得到對目標角度的正確估計,必須先進行“解相干”處理。
假設存在p分別滿足1≤p≤min(Mr1,Mr2),且p≥N,定義如下選擇矩陣J k及J′t

式中 :0p×(k-1)為 p ×(k-1)維的全 0 矩陣 ;Ip×p為p×p的單位陣。
首先構造如下矩陣

式中,JMr1和JMr2為反對角線上元素全為1,其它位置全為0的Mr1×M r1和 Mr2×Mr2的置換矩陣。
由式(12~15)可構造如下矩陣

將(4~9)式代入式(16~18)可得
同時可以驗證 A1和 A2、A3和 A4及A5和 A6分別滿足

將式(22~24)分別代入式(19~21)可得
可以證明:當滿足2(Mr1-p+1)≥N及2(Mr2-p+1)≥N 時,有 rank(~S1)=rank(~S2)=rank(~S3)=N,即實現了對所有目標信號的“解相干”。
為了減小計算量并構造三個具有特定關系的矩陣,這里采用傳播算子法對W1、W2和W3進行處理。設A11和A12分別為A1的前N 行和后2p-N行,則存在矩陣VH1((2p-N)×N維)使得下式成立

稱VH1為傳播算子[10]。記的前N行和后2p-N 行為W11、W12。不考慮噪聲影響時,有



式中‖·‖F表示Frobenius范數。求解上式可得


由式(33)可知,~V1可張成信號子空間。分別記 ~V1的前 p行和后 p行為和,有=及~V12A11=ApxrD1,因此 ,可得[10]

若分別記W2和W3的前 N行和后2p-N行為及、,=()-1;,且~V21、~V22及~V31、~V32分別為 ~V2和 ~V3的前 p行和后p行。同理可得

從式(34~36)可以看出:F1和F2有相同的特征向量矩陣,而F1和F3有相同的特征值矩陣。對F1和F3進行特征值分解可得 N個大特征值λ1,λ2,…,λN,其對應的特征向量分別為e1,e2,…,e N及,e′2,…,e′N.由和Apyr的表達式可知

式中:arccos表示反余弦函數;sum表示矢量求和;angle表示求相位角。
由式(35)可知:要得到對 βti的估計,只需獲得F2的特征值即可。因此,為了減小計算量且實現對目標參數的自動配對,可以采用如下方法來估計F2的第i個特征值

βti的估計值為

3.3 目標的空間定位
在得到對 ^αri、^βri、^αti及 ^βti的估計后 ,根據式(1),可得和的估計值 。
如圖1所示,由正弦定理可得
根據圖中的幾何關系,可得目標在空間中的三維坐標為
從而實現了對目標的定位。
4.計算機仿真結果
為了驗證本文算法的有效性,做如下計算機仿真。仿真過程中假設基線距離D=50 km.
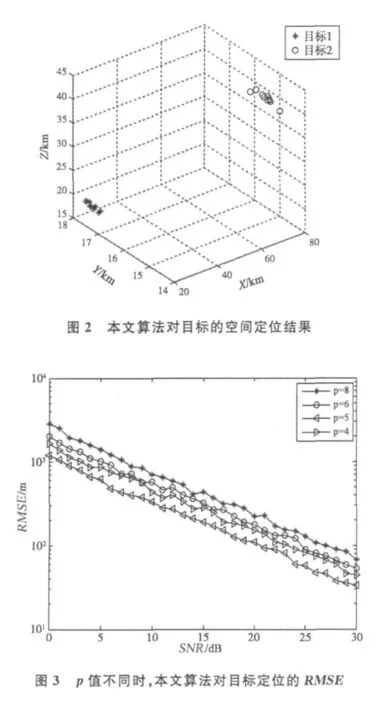
仿真1:算法對目標角度估計及空間定位結果
從表1和圖2可以看出:本文所提算法能較為精確地估計出目標相對于發射陣和接收陣的角度,從而可較為精確地實現對空間目標的定位。
仿真2:p值不同時,本文算法對目標空間定位的均方根誤差(RMSE)
仿真條件設置同仿真1,圖3中給出了p值取為8,6,5,4時,本文算法對第一個目標進行空間定位的RMSE。圖中信噪比從0 d B按步長1 d B變化到30 d B,仿真結果為100次Monte-Carlo實驗(每個SNR點做100次Monte-Carlo仿真)的統計結果。定義對第i個目標空間定位的RMSE為
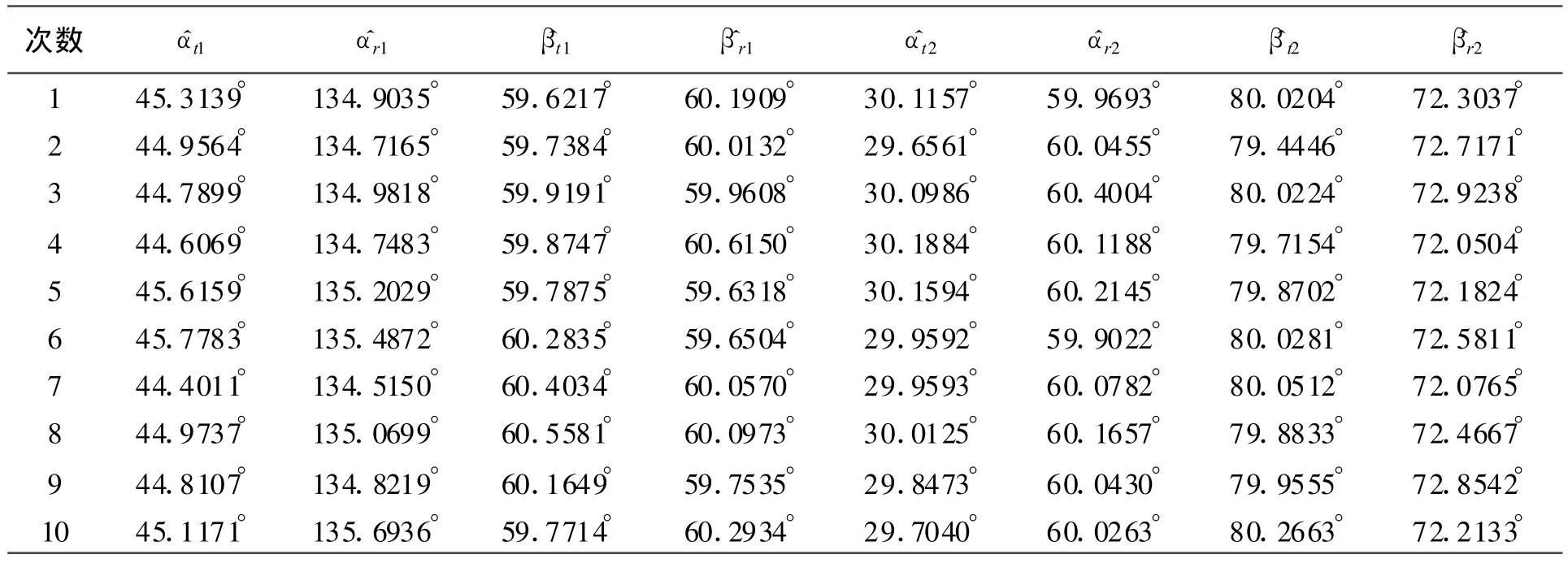
表1 算法對目標角度的估計值
其中xi,yi和zi為目標對應的真實位置。
從Monte-Carlo仿真結果可以看出:p=5時,本文算法的統計性能最好,這主要是因為在單周期目標回波的情況下,對于每個虛擬陣列來說,所有目標都是“相干”的,隨著 p值的減小,“解相干”的效果越好,然而p值越小陣列的有效孔徑損失得越嚴重。因此,算法的“解相干”效果和陣列的有效孔徑之間存在著矛盾,當p為大于目標數而小于接收陣元數的某一數值時,本文算法的性能達到最優。然而,總體看來,不論p取何值,本文算法都具有較好的統計估計性能。
5.結 論
針對空間目標的精確定位問題,提出了一種基于雙基地MIMO雷達的快速目標空間定位算法。理論和計算機仿真結果表明:所提算法避免了數據協方差矩陣的估計,不需要多維譜峰搜索和參數配對,大大降低了運算復雜度。此外,該算法只需單周期回波信號即可實現對目標相對于發射陣和接收陣角度的估計,這使得其非常適合于瞬時目標信號和快速運動目標信號的來波方向估計。
[1] FISHLER E,HAIMOVICH A,BLUM R,et al.MIMO radar:an idea whose time has come[C]//Proceedings of the IEEE Radar Conference,Newark,NJ,USA,April 2004,71-78.
[2] 何子述,韓春林,劉 波.MIMO雷達概念及其技術特點分析[J].電子學報,2005,33(12A):143-147.
HE Zishu,HAN Chunlin,LIU Bo.MIMO radar and its technical characteristic analyses[J].Acta Electronica Sinica,2005,33(12A):143-147.(in Chinese)
[3] 曾建奎,何子述.慢起伏目標的多輸入多輸出雷達檢測性能分析[J].電波科學學報,2008,23(1):158-161.
ZENG Jiankui,HE Zishu.Analysis of MIMO detection performance for slow fluctuating target[J].Chinese Journal of Radio Science,2008,23(1):158-161.(in Chinese)
[4] 劉韻佛,劉 崢,謝 榮.一種基于擬牛頓法的MIMO雷達發射方向圖綜合方法[J].電波科學學報,2008,23(6):1188-1193.
LIU Yunfo,LIU Zheng,XIE Rong.Transmit pattern synthesis algorithm for MIMO radar based on Newtonlike method[J].Chinese Journal of Radio Science,2008,23(6):1188-1193.(in Chinese)
[5] LEHMANN H,FISHLER E,HAIMOVICH M,et al.Evaluation of transmit diversity in MIMO-radar direction Finding[J].IEEE Trans.Signal Processing,2007,55(5),2215-2225.
[6] LI J,CONAN J,PIERRE S.Joint estimation of channel parameters for MIMO communication systems[C]//2nd International Symposium on Wireless Communication Systems,2005,22-26.
[7] YAN Haidong,LI Jun,LIAO Guisheng,Multitarget identification and localization using bistatic MIMO radar systems[J].EURASIP Journal on Advances in Signal Processing,2008,8(2):1-8.
[8] CHEN Duofang,CHEN BaiXiao,QI Guodong.Angle estimation using ESPRIT in MIMO radar[J].Electronics Letters,2008,44(12):770-771.
[9] JIN Ming,LIAO Guisheng,LI Jun.Joint DOD and DOA estimation for bistatic MIMO radar[J].IEEE Trans.Signal Processing,2009,89(2):244-251.
[10] 任勛立,廖桂生,曾 操.一種低復雜度的二維波達方向估計方法[J].電波科學學報,2005,20(4):526-530.
REN Xunli,LIAO Guisheng,ZENG Cao.A low complexity method for estimating 2-D DOA[J].Chinese Journal of Radio Science,2005,20(4):526-530.(in Chinese)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
