基于變頻器PID控制下負載量對動態性能的影響分析
2011-08-30 06:11:24劉卓鴻
科技傳播 2011年17期
劉卓鴻
山東工業職業學院,山東淄博 256414
1 變頻器PID控制概述
大家知道,PID控制屬于閉環控制方式,即通過目標(給定)信號與反饋信號相比較后,產生偏差,用這個偏差糾正調節控制系統控制對象的響應。變頻器PID內部電路將反饋信號與目標信號不斷地進行比較,并根據比較結果來實時地調整輸出頻率和電動機的轉速。
實現PID控制功能可通過變頻器的功能參數設置使 PID 功能有效或無效。 PID 功能有效時,由PID電路決定運行頻率; PID功能無效時,由頻率設定信號決定運行頻率。 PID 開關、動作選擇開關和反饋信號切換開關均由功能參數的設置決定其工作狀態。要實現閉環的 PID 控制功能,首先應將 PID 功能預置為有效,然后通過變頻器的功能參數碼預置,例如富士5000G11S /P11S系列變頻器,將參數 H20 設為 0時,則無 PID 功能;設為 1 時為 PID正動作控制;設為 2 時為PID 反動作控制。
2 變頻器PID控制系統動態性能的實驗研究
1)主要實驗設備:FRN2.2G11S-4CX變頻器一臺;三相異步電動機Y100L-4 功率2.2kW 帶轉速反饋;直流發電機Z2-32 2.2kW 220V 1500r/min;
2)實驗接線圖如圖1示。

圖1 富士變頻器動態性能實驗接線圖
(1)電動機的速度反饋“+”端和“-”端分別接變頻器的“12”和“11”端子;
(2)將“X1”與“CM”短接,即使PID控制無效;
(3)通過面板設定頻率(如:20Hz),按FWD鍵起動變頻器,用表測量速度反饋“+”端和“-”端極性是否正確,不正確則首先停止變頻器,再改變電動機相序;
(4)將“X1”與“CM”斷開,即PID控制有效。
3)富士變頻器PID參數設置
按PRG鍵進入菜單畫面,選“1 數據設定”,并按表1參數設置。

功能代碼 名稱 設定數據F01 頻率設定1 0 F02 運行頻率 0

表1 PID控制參數設定
3 PID控制參數調試
PID控制調試過程是通過觀察系統的響應曲線,然后根據P、I、D參數對系統的影響,調試PID參數,直至出現滿意的響應。即超調量小、起動時間短、振蕩次數少。從而確定 PID控制參數。整定步驟: 為“先比例,再積分,最后微分”。
3.1 整定比例部分
比例增益 P 越大,調節靈敏度越高,但由于系統和控制電路都有慣性,調節結果達到最佳值時不能立即停止,導致“超調”,然后反過來調整,再次超調,形成振蕩。將比例控制作用由小變到大,觀察各次響應,直至得到反應快、超調小的響應曲線。
3.2 整定積分環節
若在比例控制下穩態誤差不能滿足要求,需加入積分控制。引入積分環節I,其效果是使經過比例增益P放大后的差值信號在積分時間內逐漸增大(或減小),從而減緩其變化速度,防止振蕩。但積分時間 I 太長,又會當反饋信號急劇變化時,被控物理量難以迅速恢復。因此,I的取值與拖動系統的時間常數有關:拖動系統的時間常數較小時,積分時間應短些;拖動系統的時間常數較大時,積分時間應長些。
先將步驟(1)中選擇的比例系數減小為原來的50%~80%,再將積分時間置一個較大值,觀測響應曲線。然后減小積分時間,加大積分作用,并相應調整比例系數,反復調試至得到較滿意的響應,確定比例和積分的參數。
3.3 整定微分環節
經過步驟(2),PI 控制只能消除穩態誤差,若動態過程不能令人滿意,則應加入微分控制,構成PID 控制。先置微分時間等于0,然后逐漸加大,同時相應地改變比例系數和積分時間,3個參數反復調試至獲得滿意的控制效果和PID 控制參數。
4 不同負載量的動態性能的分析
1)用面板設定PID命令值為20。
按FWD鍵起動變頻器,觀察變頻器的起動過程。主要包括:超調量、起動時間、振蕩次數;面板PID反饋量,穩態轉速等。按STOP鍵停止變頻器。
用示波器測量階躍輸入下轉速的時間響應,觀察并記錄響應曲線。
2)用面板設定PID命令值為40,重復上一步。
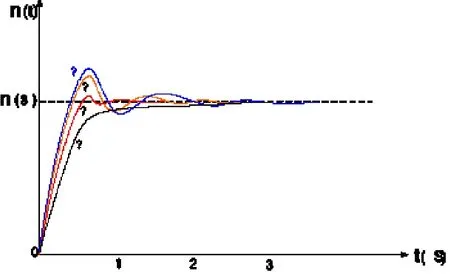
圖2 變頻器動態響應曲線圖
在圖2中可看到負載量對動態性能的影響;實驗數據見表2。
從圖表中看出隨負載的增加其超調量越來越小,振蕩次數越來越小。因此,PID參數整定時應充分考慮到負載的影響,根據負載大小調整參數,使負載的影響降到最低。
PID最佳整定參數確定后,并不能說明它永遠都是最佳的,當外界擾動發生根本性的改變時,就必須重新根據需要再進行最佳參數的整定,這樣才能充分體現PID控制優點。
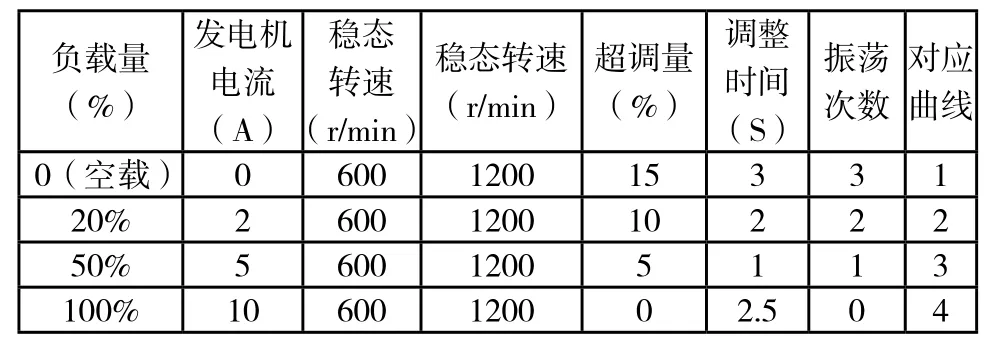
表2 負載量對動態性能的影響(PID命令值分別為20和40)
5 結論
變頻器PID控制系統的參數必須根據實際工程具體要求來考慮。在工業過程控制中,首先要保證閉環系統穩定,然后對給定(目標)量的變化能迅速跟蹤,超調量小。在不同干擾下或負載量變化時輸出應能保持在給定值附近,控制量變化應盡可能的小。在系統和環境參數發生變化時控制應保持穩定。一般來說,要同時滿足這些要求是很難做到的,必須根據系統的具體情況,滿足主要的性能指標,同時兼顧其它方面的要求。
[1]陳伯時.電力拖動自動控制系統[M].3版.北京:機械工業出版社,2003.
[2]王樹.變頻調速系統與應用[M].機械工業出版社,2005,3.
[3]王建,徐洪亮.富士變頻器入門與典型應用[M].北京:中國電力出版社,2008.
[4]FRENIC 5000G11S/P11S 操作說明書 富士電機機器制御株式會社.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
防爆電機(2020年3期)2020-11-06 09:07:42
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
測控技術(2018年5期)2018-12-09 09:04:50
電子制作(2018年11期)2018-08-04 03:25:42
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
電子制作(2017年7期)2017-06-05 09:36:13
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46
