一種改善逆變器輸出波形的方法
2011-08-30 08:53:56齊保良牟善軍
山東建筑大學學報 2011年4期
關鍵詞:方法
齊保良,牟善軍
(山東建筑大學信息與電氣工程學院,山東 濟南 250101)
0 引言
風能因其具有無污染、可再生等特點目前已被人們廣泛的關注和應用。小型風力發電系統因其體積小靈活性大而得到了較好的發展和應用。在研制小型風力發電系統的過程中,調整逆變器的死區時間[1-2]使輸出電壓為理想的正弦波是亟待解決的問題。
目前,研究死區效應常用的方法是空間電壓矢量脈沖調制法(space voltage pulse width module,SVPWM),該方法相對于其它PWM技術具有電流諧波小,轉矩脈動小噪聲低等優點,并且可獲得較高的直流電壓利用率和較低的輸出諧波[3-4]。本文在SVPWM的基礎上提出一種新型的調制方法,使逆變器輸出電壓波形更接近正弦波。
1 逆變器死區效應對輸出電壓影響的分析
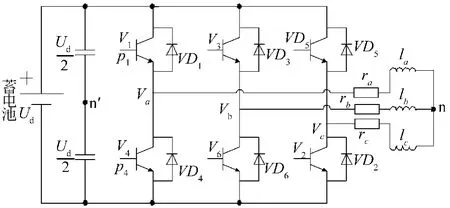
圖1 三相逆變器結構圖
由于逆變過程中使用的半導體器件具有非理想開關特性,導致了逆變后的電壓具有非性的特點,從而引起逆變后電壓波形的改變。圖1為風力發電系統中蓄電池給三相電機供電的結構圖。這里假定SVPWM發生器中的開關器件是理想的,電流極性以流向負載方向為正如圖2所示的ia,其中V1~V6為高電平導通,低電平關斷的IGBT型功率開關管,驅動信號分別用p1~p6表示。為簡化分析,僅以逆變器中V1和V4所在的橋臂為例分析逆變器的死區現象如圖2所示,其中驅動信號p1和p4的相位反向。
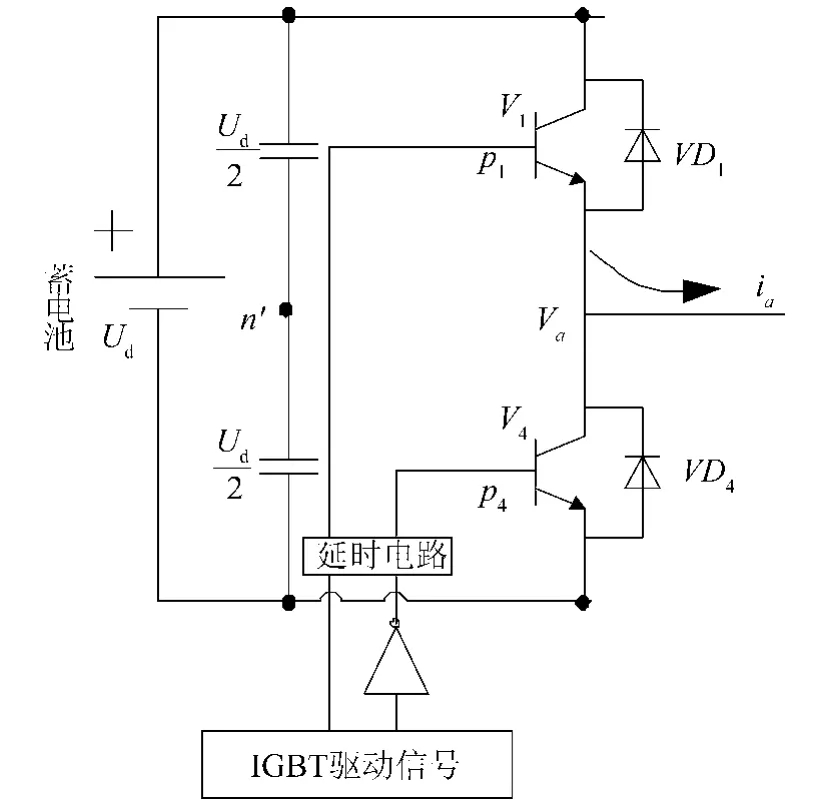
圖2 單相橋臂控制結構圖
在逆變過程中,由于IGBT中結電容的存在,形成了一個“存儲效應”造成了器件的關斷延時現象,為防止當V4導通時V1還未關斷現象出現造成的短路,在上、下橋臂開關器件之間加入一個延遲時間Td,在延遲時間內V1和V4均不導通,此時電路經過續流二極管VD1和VD4的續流作用構成閉合回路,此延遲時間就被稱作死區時間。
以n'點為基準點,以a相中理想狀況下U'an及Uan電壓波形、帶死區時間的驅動信號p1和p4波形和調整后輸出電壓U'an'和U'an的波形為例,如圖3所示。其工作原理為:在感性負載時,當V1導通時Va點相對于N'點的電壓為+Ud/2,當V4導通時Va點相對于n'點的電壓為-Ud/2。在死區時間Td內,V1和V4都不導通時,感性負載通過續流二極管VD1或VD4進行續流,以保持a相電流ia的連續。在ia正半周回路通過VD4續流,Va點與直流電源負極接通,其相對于n'點電壓為-Ud/2;在ia的負半周回路通過VD1續流,Va點直接與直流電源正極接通,其相對于N'點電壓為+Ud/2。這樣,逆變器的實際輸出電壓U'an'及U'an的波形與理想波形進行比較后就發生了畸變。經分析知,在ia正半周,所有正脈沖寬度都減小Td,所有負脈沖寬度都增加Td;相反的,在ia負半周,所有負脈沖寬度都減小Td,所有正脈沖寬度都增加Td。畸變后實際電壓波形如圖3中的U'an'和U'an。由圖中可知,Td的存在不僅使輸出電壓降低、電流波形失真,更嚴重的甚至能引起電機震蕩。
其中:

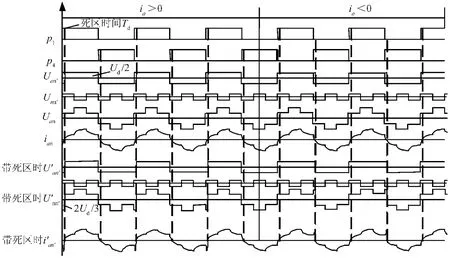
圖3 逆變橋的死區效應波形示意圖
由分析和波形圖可知,對驅動信號p1和p4引入死區時間后輸出電壓和電流波形圖產生了畸變。假定給定的IGBT導通時間為Ton,關斷時間為Toff,那么系統的實際死區時間Te為:

2 利用十二矢量法改善逆變器輸出電壓波形
SVPWM主要思想是:以三相對稱正弦波電壓供電時交流電動機的理想磁通為基準[5,6],根據三相逆變器不同的開關模式進行切換,從而形成PWM控制信號,達到控制的目的。本文中用的三項全橋逆變電路是由六個開關器件構成的三個半橋,根據六個開關的不同組合形式可分為8種,其中有兩個開關狀態在電機的驅動中不產生有效的電流被稱為無效矢量或是零矢量,分別記作000,111(這里表示的是三個上橋臂同時導通、關斷的狀態)。另外六個稱為有效矢量或是可用矢量,SVPWM就是通過在兩個最近的有效矢量和一個無效矢量之間進行切換的方法,不斷逼近旋轉參考矢量,于是我們可以得到圖4所示的矢量切換序列。
另外,根據圖2中a橋臂的狀態可得到如表1的數據。

表1 電流極性與開關管和續流二極管狀態及調整電壓之間的關系
從而推斷出其余兩橋臂的狀態,假定Sj為開關函數其中j=a,b,c三相,那么可假設:
Sj=1;表示j相上橋臂開關管導通,下橋臂開關管關斷;Sj=0;表示j相上橋臂開關管關斷,下橋臂開關管導通。
另外,由于在異步電動機矢量控制系統中,是以旋轉坐標和兩相靜止坐標為基礎分析的,所以就要通過Clark變換(α-β變換)根據公式(2)將三相坐標轉換到兩相靜止坐標中去,可得到三相電壓合成矢量關系式(3):


可得出開關函數與電壓矢量的對應關系如表2所示。
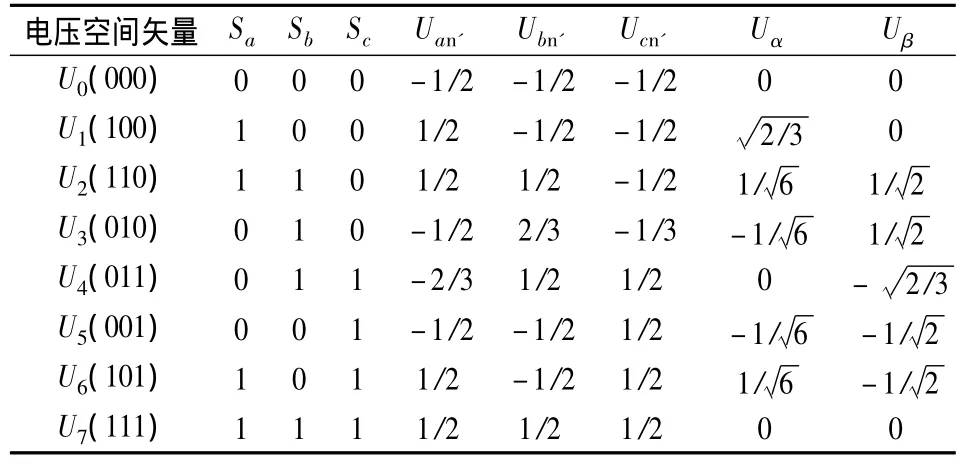
表2 開關函數與電壓矢量的對應關系
根據所得到的關系可做出復平面上的電壓矢量圖如圖4所示。
為了更加精確的展現換向過程,本文提出一種改進型的SVPWM,即將180°導通方式和120°導通方式混合使用,暫且稱為十二矢量法。其原理為:將原來的六個空間矢量分別再分別均分成兩個空間矢量,也就是每兩個狀態的夾角變為30°如圖5所示,下面以U1相換到U2相為例分析效果,首先假設,上橋臂開關管導通設為1,下橋臂開關管導通設為0,沒有管子導通用X表示。在系統從狀態U1到達狀態U2的過程中,系統會經過Ⅰ1和Ⅰ2兩個區域,當合成矢量落在狀態U1與U12之間時,由這兩個矢量進行合成,其中矢量U1是由開關管 V1,V6,V2導通產生的,矢量U12是由開關管V1和V2導通產生的,這樣再配合零矢量和恰當的時間就可以合成出該范圍內的空間矢量。同樣的方法也可以對其他空間中的矢量進行合成。
下面根據假設對開關管的導通時間進行計算,如圖6所示,在矢量U1和矢量U12之間得到空間矢量的合成圖。
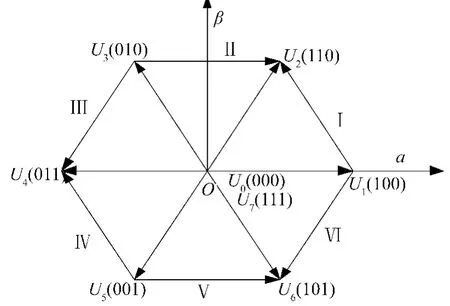
圖4 電壓空間矢量圖
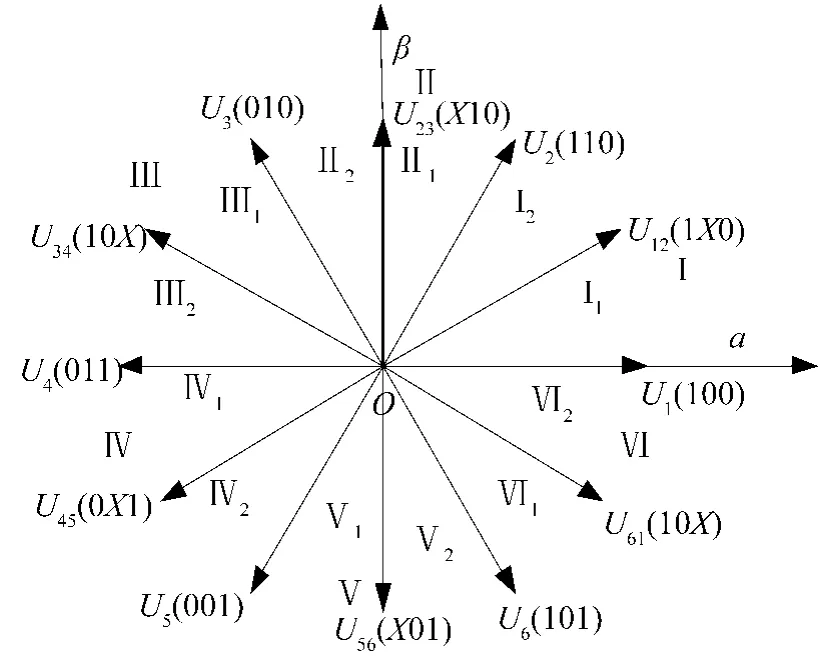
圖5 改進的SVPWM方法(十二矢量法)原理圖
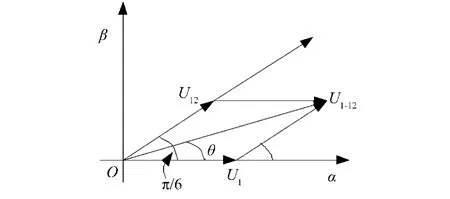
圖6 電壓矢量合成原理圖
可根據圖所示、伏秒平衡原理以及三角函數關系有如下公式:

各矢量作用時間計算公式為:
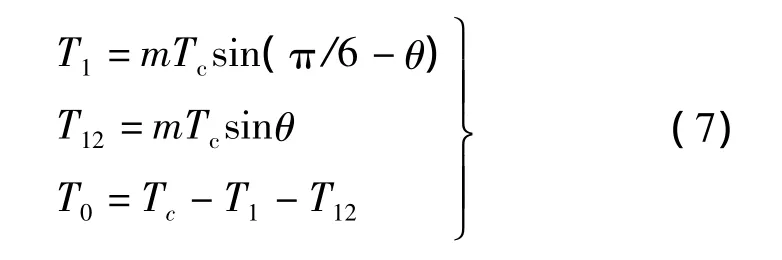
根據公式(4)~(6)可知,該方法可準確的計算出各矢量的作用時間,并加以控制。如圖7波形圖所示,由圖可知該方法改善了逆變器輸出電壓的波形。并且實現了對開關管通斷的控制,計算簡單。
3 實驗結果分析
本次實驗系統是基于600W小型風力發電系統進行設計的[7],采用DSP控制器進行死區補償,選用的電機為永磁同步電動機,其功率為600W,定子電阻為1Ω,定子電感為5mH,極對數為2,轉速為1500r/min。控制芯片選用 PI公司的TMS320F2812。功率模塊選用 EUPEC生產的BSM35GD120DN2,開通時間為 Ton=120ns,關斷時間為Toff=450ns,載波頻率fPWM=5kHz,死區時間Td=5μs。如圖7所示死區補償前后a相波形圖。
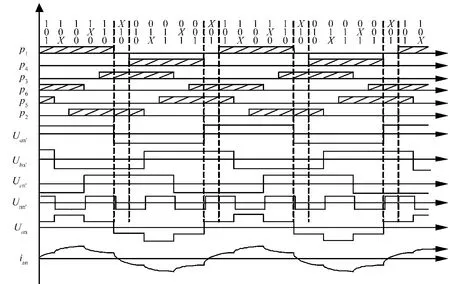
圖7 十二矢量法獲得的電壓電流波形圖
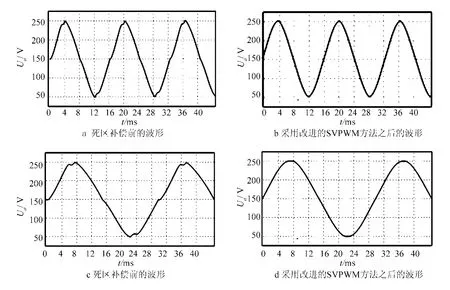
圖8 實驗輸出波形圖
從波形圖的對比可以看出采用改進的SVPWM之后的波形較補償之前的波形諧波成分變小,基本沒有畸變,更接近正弦波。
4 結論
本文在空間矢量脈寬調制(SVPWM)方法的基礎上進行改進,提出了十二矢量法,利用該方法可以對逆變器輸出電壓波形進行調整,并根據矢量合成圖推導出各矢量在逆變過程中的作用時間。根據試驗和仿真結果可知,該方法能有效的改善逆變器的電壓輸出波形,并且避免了上、下橋臂直通現象的產生,使逆變器輸出電壓軌跡更接近正弦波。
[1]URASAKI N,SENJYU T.Dead-time compensation strategy forpermanent magnet synchronrous motor drive taking zero-current clamp and parasitic capacitance effects into Ac-count[J].Pro of IEE on Electr Power Appl,2005,152(4):407 -416.
[2]荊濤,范蟠果.一種新穎的空間矢量死區補償算法研究[J].電力電子技術,2008,42(3):84 -86.
[3]楊貴杰,孫力.空間矢量脈寬調制方法的研究[J].中國電機工程學報,2001,21(10):79 -83.
[4]ZHANG X W,LI Y D,WANG W S.A novel implementation of SVPWM algorithm and its application to three-phase power converter[C].PIEMC 2000,Virginia,2000.
[5]萬健如,魏志強,李蓮,等.針對SVPWM死區問題的一種新的控制方法[J].電工技術學報,2006,21(7):105 -120.
[6]齊保良,李朋.小型風力發電系統在線自調整模糊控制的應用[J].山東建筑大學學報,2010,25(4):391 -393.
[7]曹博,陳起俊,孫帥.風光發電技術在建筑應用中的實例分析[J].山東建筑大學學報,2011,26(1):76 -79.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56