作戰實體概念模型結構研究
2011-09-02 06:23:56翟懷宇柏彥奇申耀德
指揮控制與仿真 2011年5期
翟懷宇,柏彥奇,申耀德,徐 超
(軍械工程學院,河北 石家莊 050003)
在對作戰系統進行建模仿真時,作戰實體按照是否考慮運動屬性分為靜態實體和動態實體[1]。在實體模型構建方面,作戰系統的復雜性主要體現在動態實體的復雜性上,因此本文主要討論動態實體概念模型構建的問題。在作戰仿真系統中,最終的執行實體往往是虛擬兵力或者半實物的人裝單元,而并不是單純的武器裝備,因此并沒有智能水平為零的實體,因此,可以將作戰仿真系統內的任何實體都看作智能體。
從作戰過程看,作戰指揮的實體要素主要是指揮者與指揮對象[2]。在作戰仿真系統中,指揮者一般被抽象為指揮型實體,其結構側重于指揮、決策部分的構建;指揮對象一般是行動型實體,其結構側重于響應和執行部分的構建。此外,由于作戰實體的層級特征,部分作戰實體既是指揮者又是指揮對象,一般抽象為中間型實體,其結構需要指揮決策和執行兼備。
在對作戰實體的仿真建模中,不同類型的作戰實體具備不同的實體結構,結構的多樣會降低模型的重用性。為了提高系統開發效率和模型的重用性,需要有一個通用的作戰實體概念模型來描述不同類型的作戰實體。本文運用六元抽象方法的映射模型,將作戰實體視為智能體,對作戰實體概念模型各要素構成及相互關系加以分析,明確了不同類型實體在狀態、行為和結構上的一致性,提出了一種以知識系統為中心的通用的作戰實體概念模型結構。
1 作戰實體概念模型
六元抽象方法給出了作戰實體概念模型的構成要素[1,3],如圖1所示。
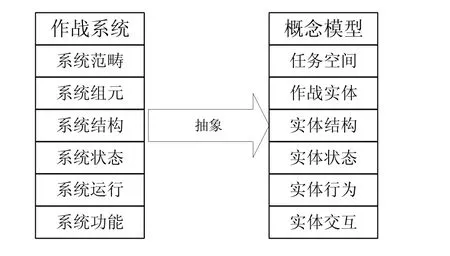
圖1 六元抽象方法由作戰系統向概念模型的映射
據圖 1,我們得到作戰實體的六元組概念模型:

其中,Me為作戰實體E模型。
Ms為實體的任務空間。任務空間給出了作戰實體所在的領域信息。在構建概念模型時,作戰實體任務空間決定了實體的結構、狀態、行為和交互的范圍。
E為任一作戰實體。在概念模型中,E作為實體的名稱。
S為作戰實體狀態,是一個二元組,即S={ So,Si}。 So指實體外部狀態,是作戰實體對其他實體以及外部環境通過整體表現出來的各類特征,如長度、顏色、重量等,通常用一組狀態向量來描述,So={So1,So2,...,Son},這些狀態向量稱為作戰實體的屬性。 Si指實體的內部狀態,是作戰實體在進行內部活動時各部分所體現的特征。作戰實體的內部活動是對外界感知和信息的響應過程,是一種心智活動過程,因此,其所體現出來的特征是作戰實體的心智狀態。
A為作戰實體的行為。作戰實體的行為是實體狀態改變的真正動因和依據。作戰實體的行為為一個二元組:A={Ao, Ai}。Ao是改變作戰實體外部狀態的行為即外部行為,是作戰實體外觀的活動、動作、運動、反應或行動[4],它是實體行動部分的具體動作表現,如機動、射擊等。Ai是改變內部狀態的行為即內部行為,它改變了其心智狀態,因此又稱為心智行為。心智行為主要是對外部感知的規劃和決策,其最終結果是為作戰實體外部行為提供行動方案。
St為作戰實體的結構。作戰實體的結構為一個二元組:S={Sto,Sti}。Sto是作戰實體在作戰系統中的結構標識,用于表示其在作戰系統宏觀結構中的位置,主要標注實體在分類結構中的父類和在組合結構中的上一級實體。 Sti是作戰實體的內部結構,主要描述作戰實體內部微觀結構。
I為作戰實體的交互。交互是作戰實體與外部環境的相互作用,這里的環境是指作戰實體所處的領域環境,不僅包含自然環境等,還包括其他作戰實體,是由其任務空間決定的。作戰實體對外界的感知、受到的影響和接受的信息等都是外界對其的作用,而作戰實體發送的信息以及對外界環境所執行的動作均是其對外界環境的作用,因此作戰實體的感知、通信和執行可統一抽象為交互。
就作戰實體概念模型整體而言,任務空間是構建作戰實體概念模型的基礎,它確定了模型的問題域。就作戰實體概念模型的狀態、行為而言,作戰實體的內部行為和內部狀態的演變決定了其外部行為和屬性特征。因此,對于作戰實體的微觀模型的構建,應當是在確定任務空間后,重點研究其內部的行為、狀態,并以此確定作戰實體內部結構。
2 作戰實體結構模型
在作戰仿真系統中,作戰實體的運行過程就是對外界輸入進行響應,做出輸出。對單個的作戰實體而言,其對輸入的響應過程是以其領域知識為基礎的,是一個知識處理的過程,如圖2所示。
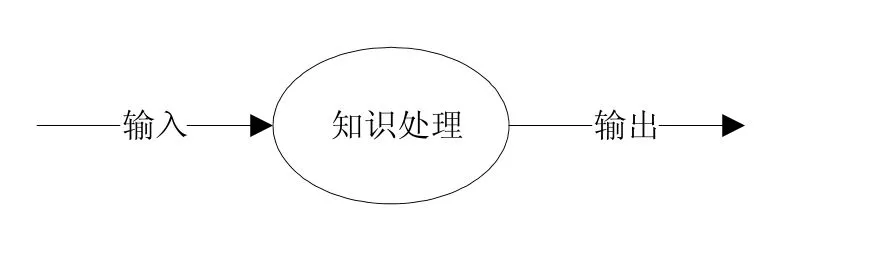
圖2 作戰實體運行過程元模型
2.1 知識處理
2.1.1 知識
知識一般可分為說明性知識、過程性知識和控制性知識[5]。說明性知識提供概念和事實;過程性知識主要用來描述作戰實體對輸入的響應過程,即響應規則;用控制策略標識問題的知識稱為控制性知識。作戰實體概念模型是在確定的問題域下構建的,實體的知識處理過程相對固定,因此作戰實體的知識構成主要包括說明性知識和過程性知識。
說明性知識主要分為兩類:一類是實體的任務空間信息,包含部隊編成信息、武器信息、人員信息、作戰樣式、任務模式、環境信息和敵情信息等;另一類是實體的各種外部狀態信息。
過程性知識主要分為三類:一是指揮決策規則,用于約束作戰實體的指揮決策過程;二是執行規則,用于約束作戰實體在輸入條件下的動作;三是實體屬性規則,用于約束作戰實體的屬性變化。
2.1.2 知識處理過程
通常,智能體按照其內部知識處理過程,可分為反應型智能體、慎思型智能體和混合型智能體。反應型智能體是依據一定的規則體系,由輸入直接生成輸出。慎思型智能體則是依賴一定的知識系統,對輸入信息進行推理、規劃,最終形成行動意圖并進行輸出。而作戰實體是一種混合型智能實體,不僅不同實體的知識處理過程不同,而且同一實體對不同輸入的響應也不相同。就同一實體而言,其對輸入信息的響應方式是由規則決定的,我們將這類決定作戰實體知識處理方式的規則稱為前端規則,在經過前端規則的篩選后,再按照相應的處理方式對輸入信息進行處理。作戰實體對輸入的響應方式分為兩類:反應響應和推理響應。反應響應是作戰實體根據一定的反應規則,對輸入進行的直接響應;推理響應則是作戰實體對輸入經過規劃、決策的知識處理過程后做出的響應。如圖3所示。
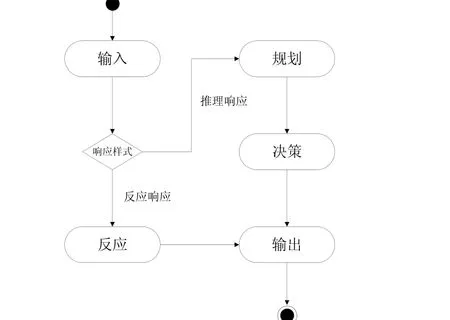
圖3 作戰實體知識處理過程模型
2.2 作戰實體內部結構
我們將作戰實體的結構分為HEAD和BODY兩部分。BODY是作戰實體同外界環境進行相互作用的部分,主要包括輸入模塊和輸出模塊。HEAD是作戰實體進行知識處理的部分,其主要由知識系統、愿望集和意圖集構成,如圖4所示。
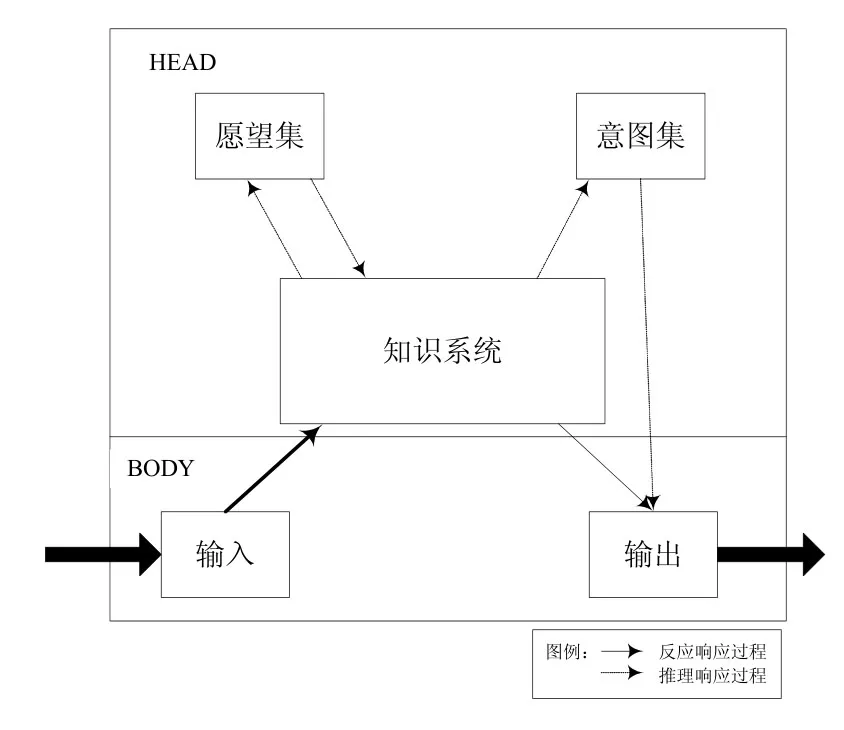
圖4 作戰實體內部結構基本構成
作戰實體的知識表示,一般采取產生式表示法,各類問題的求解規則采用產生式規則,這種以產生式表示法為基礎的知識系統稱為產生式系統[6]。知識系統的主要構成為前端規則庫、反應規則庫、推理規則庫、全局信息庫和推理機。其中,推理規則庫、全局信息庫和推理機構成了一個產生式系統。由于我們將反應響應也列為知識處理的結果,因此前端規則庫和反應規則庫也是知識系統的組成部分。為加以區別,我們將知識系統分為三大部分:前端規則庫、反應系統(反應規則庫)和產生式系統,如圖5所示。
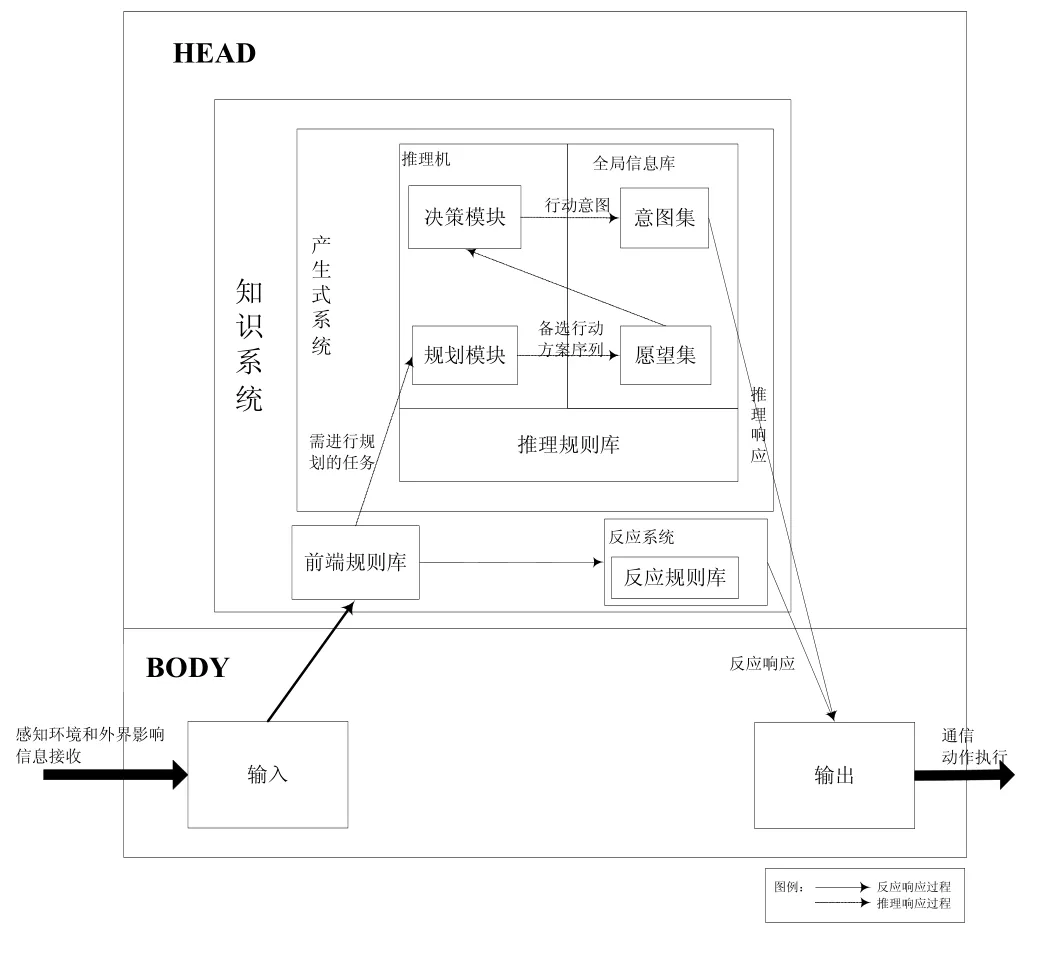
圖5 作戰實體概念模型結構圖
2.2.1 前端規則庫
前端規則庫位于產生式系統的前端,它用來決定對作戰實體對輸入的響應方式。前端規則庫的輸入為作戰實體所接收到的所有輸入,輸出為反應響應、推理響應或者二者兼備。
前端規則庫的作用是將輸入同任務空間中的任務模式相匹配,從而決定作戰實體對輸入的響應方式。
2.2.2 反應規則庫
反應規則庫用于儲存作戰實體的產生反應響應的規則。此類規則以執行規則和實體屬性規則為主,它決定了由輸入引起的作戰實體的行動、通信和屬性改變情況。
2.2.3 產生式系統
1)推理規則庫
推理規則庫用于存儲作戰實體進行規劃、決策所需的規則,根據實體任務空間要求,不同類型的作戰實體對規則的類型和內容的選取是不同的,這也決定了作戰實體心智行為特征。如指揮型實體以指揮規則為主,具有較少的執行規則和實體屬性規則;執行實體多以執行規則為主,有的可能不包含指揮規則;而中間型實體則是各類規則兼備。
2)全局信息庫
全局信息庫包含三個模塊:常識庫、愿望集和意圖集。常識庫用于存儲作戰實體所應具備的各類說明性知識,如前所述,一方面是任務空間信息,另一方面是自身的屬性信息。愿望集用于存儲下一步可能的行動集合,即愿望;愿望分為兩種:一類是固定愿望,它長存于愿望集,既不被添加也不被刪除,另一類是臨時愿望,即由推理機根據輸入所得的下一步可能的行動集合。意圖集是下一步立即執行的行動集合,是一個最優愿望。
3)推理機
推理機主要有規劃模塊和決策模塊構成。規劃模塊負責對輸入運用規則進行處理,得到輸入響應的愿望集合;決策模塊主要輸入的愿望集合進行優化選擇,得到最終的行動意圖。
3 作戰實體概念模型實例
3.1 背景介紹
仿真背景為對機動防御之敵進行進攻戰斗,紅方部隊為裝甲步兵。本文構建裝甲步兵的單車概念模型,重點介紹任務空間、前端規則的具體內容以及作戰實體具體的活動流程。
3.2 任務空間
為方便表述,我們這里僅進行簡單的作戰想定:裝步連對機動防御之敵進行進攻戰斗。任務空間表述如表1所示。
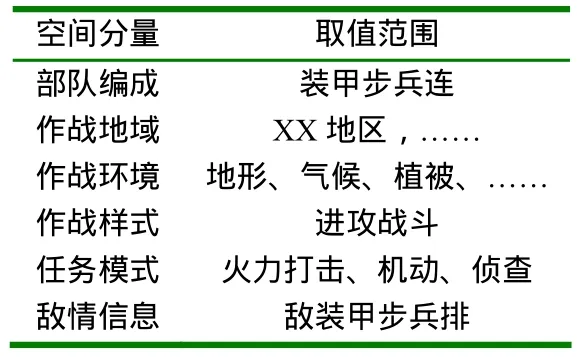
表1 裝甲步兵單車實體任務空間
3.3 前端規則
對應任務空間,我們規定前端規則如下:
WHEN〈未執行偵察任務〉IF〈指揮命令為火力打擊和機動〉&〈條件成熟〉THEN〈至反應式系統〉;
WHEN〈未執行偵察任務〉IF〈指揮命令為火力打擊和機動〉&〈條件不成熟〉THEN〈至產生式系統〉;
WHEN〈未執行偵察任務〉IF〈指揮命令為偵察〉THEN〈至反應式系統產生機動動作〉&〈至產生式系統確定偵察策略〉;
WHEN〈執行偵察任務〉IF〈感知敵情〉THEN〈至產生式系統確定如何響應〉。
3.4 實體行為
用UML活動圖來描述作戰實體的行為。對單車行為的描述側重前端規則對響應樣式的選擇作用,如圖6所示。
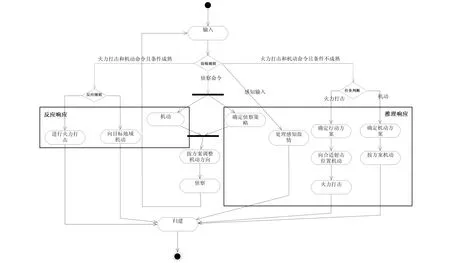
圖6 裝甲步兵單車行為活動圖
在接收輸入后,前端規則將任務進行了篩選、拆分,作戰實體可按照所需樣式進行分別響應或并發響應。這種結構在保證完成任務的同時兼顧了效率,并且可適應不同類型作戰實體的建模需求。
5 結束語
本文通過分析作戰實體概念模型組成要素之間的關系和智能實體內部狀態和行為,提出了一種以知識系統為中心的作戰實體結構模型。通過對裝甲步兵單車概念模型中前端規則運用情況和行為過程的分析,表明該模型能夠實現對作戰實體知識處理方式的控制,提高了作戰實體對輸入響應的效率,并為解決作戰仿真中作戰實體結構不一致的問題提供了依據。本文提出了一種結構框架,對于知識處理的具體行為建模將在下一階段進行研究。
[1]柏彥奇.聯邦式作戰仿真[M].北京:國防大學出版社,2001.
[2]丁邦宇.作戰指揮學[M].北京:軍事科學出版社,2004.
[3]張祥林,柏彥奇,周文.面向 Agent六元抽象概念建模方法[J].指揮控制與仿真,2008(2):87-90.
[4]古平.基于Agent的裝備保障概念模型研究[D].石家莊:軍械工程學院,2003.
[5]史忠植.知識工程[M].北京:清華大學出版社,1988.
[6]楊炳儒.知識工程與知識發現[M].北京:冶金工業出版社,2000.
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
哲學評論(2021年2期)2021-08-22 01:53:34
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中華詩詞(2019年7期)2019-11-25 01:43:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
