基于中繼衛星的飛船定軌精度分析
2011-09-21 08:41:12王彥榮魏小瑩陳建榮
載人航天 2011年3期
關鍵詞:測量
王彥榮 魏小瑩 陳建榮,2
(1中國西安衛星測控中心 2宇航動力學國家重點實驗室)
1 引言
隨著航天技術的發展,世界各國都在大力發展數據中繼衛星系統,中繼衛星在航天測控領域發揮著越來越重要的作用。其中測定軌是中繼衛星系統的一項重要功能。發展基于天基測控的衛星高精度軌道確定與控制技術,不僅符合現階段我國衛星自主定軌技術的發展趨勢和基本要求,而且具有廣闊的應用前景。本文利用神舟七號任務的實測數據,對基于中繼衛星測量的飛船定軌和預報精度進行深入分析論證[1]。
2 測量模型
天基星用戶星聯合定軌技術使用的測量模型為天基星、用戶星、觀測站之間的“四程距離和(下稱距離和)”測量模型[2]。圖1中為中繼星對用戶星的一次測量過程,無線電信號經過中心站—中繼衛星—用戶星—中繼衛星—中心站,由信號在出入中心站的時間差即可計算出距離和觀測量:

式中:τi——信號在各階段的傳播時延;c——光速;Δ——測量系統誤差,包括儀器系統誤差、對流層和電離層引起的電波折射修正等;ε——測量隨機誤差。
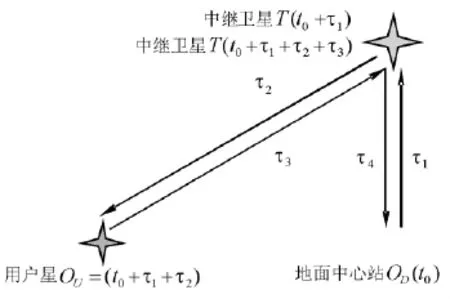
圖1 天基星用戶星聯合定軌測量模型
3 軌道確定策略
在神舟七號任務中,用中繼衛星對飛船實施了跟蹤測量,這里選擇了部分圈次的測量數據,對其四程距離和測量數據進行處理[3]。定軌過程中除二體問題外,考慮的攝動因素有地球非球形引力、第三體引力、大氣阻尼、太陽輻射壓、地球輻射壓、地球固體潮和海潮等,地球引力場模型為GRIM5-C1(2000)(120×120),行星歷表采用 DE405,大氣密度模型為MSIS2000。空間環境參數F10.7、地磁指數采用事后實測值。在用導航衛星測量數據定軌時,除解算6個軌道量外,還解算了大氣阻尼系數。
用距離和測量數據進行定軌時采用4種方案:
方案1:使用四圈飛船四程距離和數據,聯合求解中繼衛星和飛船的軌道,同時解算了大氣阻尼系數;
方案2:使用四圈飛船四程距離和數據、中繼星地面站測量數據,聯合求解中繼星和飛船軌道,同時解算了大氣阻尼系數;
方案3:使用四圈飛船四程距離和數據、飛船USB測量數據,聯合求解中繼衛星和飛船的軌道,同時解算了大氣阻尼系數;
方案4:使用四圈飛船四程距離和數據、飛船USB測量數據、中繼星地面站測量數據,聯合求解中繼星和飛船軌道。
4 定軌精度分析
利用長弧飛船距離和測量數據和中繼衛星的多站測距數據進行定軌,聯合解算飛船和中繼衛星的軌道,以導航衛星測量數據的定軌預報結果為基準進行比較,誤差的分布情況分別如圖2、3。
可以看出,飛船定軌弧段內平均誤差約13m,最大誤差約18m,預報48h平均誤差約250m,最大誤差約600m,中繼衛星定軌弧段內平均誤差約66m,最大誤差約112m。
使用飛船四程距離和測量數據、USB測量數據和中繼衛星的多站測量數據,分別按以上4種方案進行定軌,并預報 3、6、12、24 和 48h,將定軌結果和導航衛星數據的定軌預報結果進行比較,將比較結果分解到R,T,N三個方向,誤差統計于表1,總的位置速度誤差分布情況如圖4至圖11所示。
根據對各方案的誤差統計與分析,可以看出:
(1)方案1,定軌弧段內最大誤差在30m左右,最大誤差為36m;預報12h誤差均在100m左右;
(2)方案2,定軌弧段內平均誤差在20m左右,最大誤差在40m以內;預報12h最大誤差均在100m左右;
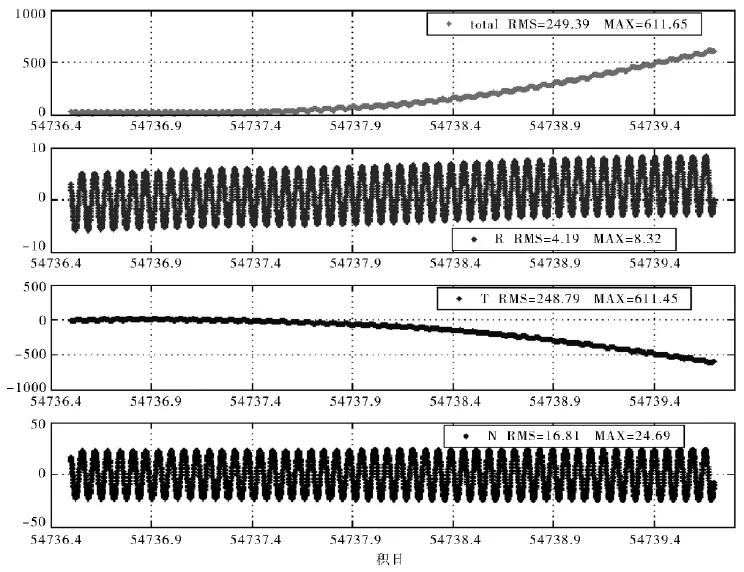
圖2 飛船定軌結果與基準彈道的誤差
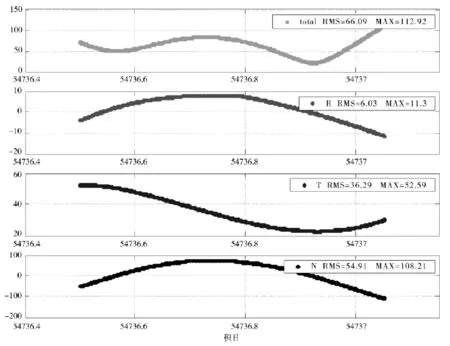
圖3 中繼衛星定軌結果與基準彈道的誤差
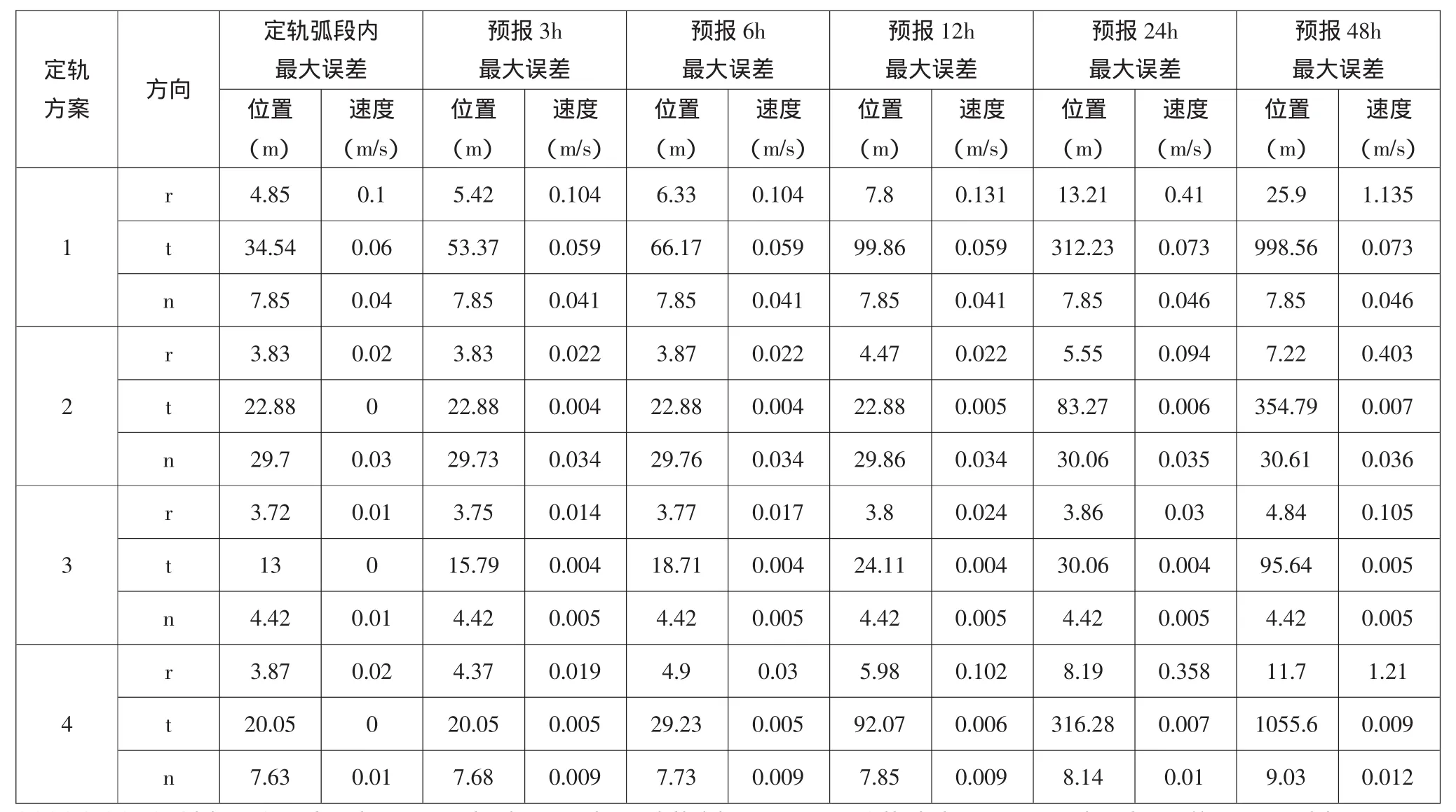
表1 各方案定軌、預報結果和導航衛星數據的定軌結果比較
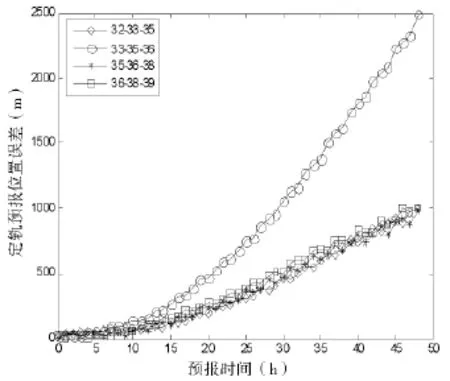
圖4 方案1定軌預報結果與基準彈道的位置誤差
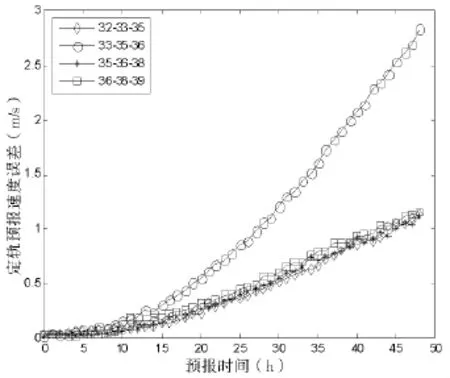
圖5 方案1定軌預報結果與基準彈道的速度誤差
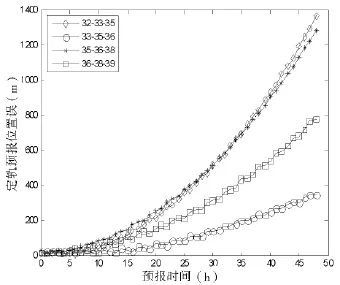
圖6 方案2定軌預報結果與基準彈道的位置誤差
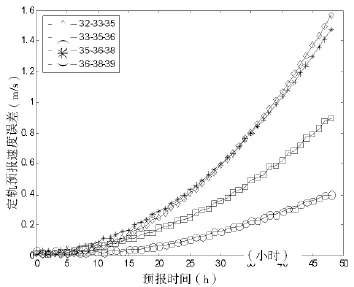
圖7 方案2定軌預報結果與基準彈道的速度誤差
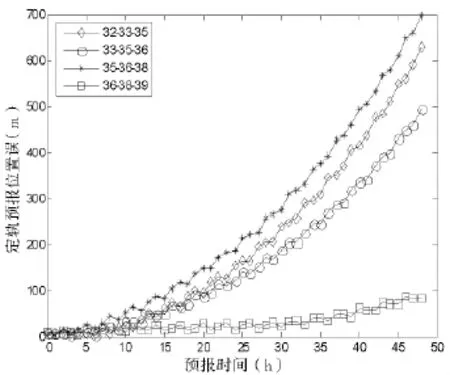
圖8 方案3定軌預報結果與基準彈道的位置誤差
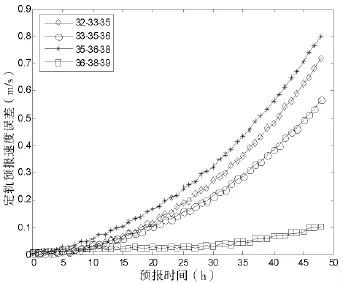
圖9 方案3定軌預報結果與基準彈道的速度誤差
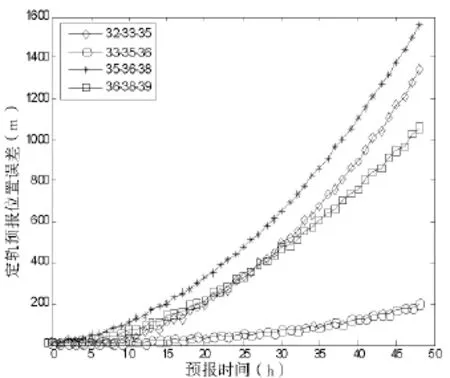
圖10 方案4定軌預報結果與基準彈道的位置誤差
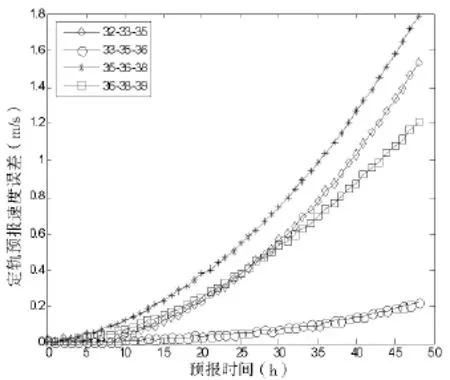
圖11 方案4定軌預報結果與基準彈道的速度誤差
(3)方案3,定軌弧段內最大誤差在20m左右;預報12h最大誤差均在150m以內;
(4)方案4,定軌弧段內最大誤差在30m以內;預報12h大部分圈次最大誤差在100m左右。
5 結論
基于中繼衛星的飛船四程距離和數據聯合定軌,通過選用4種不同的定軌方案,對飛船進行軌道確定與預報,在太陽活動低年,定軌弧段內最大誤差為30m左右,預報12h誤差約100m,長弧測量數據定軌弧段內精度可達20m左右。 ◇
[1]董光亮,劉迎春.聯合定軌技術及其應用前景[J].飛行器測控學報,2002,9,(3):12-16.
[2]吳功友,王家松,趙長印,陳建榮.天地基聯合多星定軌及精度分析.中國空間科學技術,2007,6,(3):58-63.
[3]李濟生.人造衛星精密軌道確定.解放軍出版社,1995.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00