基于DSP測量的捷聯慣導系統設計
2011-10-09 09:46:16馬建倉
電子設計工程 2011年24期
關鍵詞:系統
郝 鵬,馬建倉
(西北工業大學 電子信息學院,陜西 西安 7101295)
捷聯慣性系統也就是采用慣性敏感元件(陀螺和加速度計)直接“捆綁”在運載體的機體上,它是一種無框架系統,由3個速率陀螺、3個線加速度計和微型處理器組成,是一種不依賴于任何外部信息、也不向外部輻射能量的自主式導航系統,具有隱蔽性好,可在空中、地面、水下等各種復雜環境下工作的特點[1-3]。而應用MEMS微型傳感器結合高速DSP處理器的捷聯慣導系統具有體積小、重量輕、集成度高、成本低等優點,具有廣泛的應用前景[4-5]。由于慣性元器件有固定漂移率,不可避免會造成導航積累誤差,因此,一般商用或者軍用自主導航平臺系統通常采用如全球定位系統+捷聯慣導系統(GPS/INS)[6-7]、星光導航系統+捷聯慣導系統(CNS/INS)[8]等組合導航方式進行完整導航,其中捷聯慣導系統提供短時高速率高精度導航,而用其他導航方式對其積累誤差進行補償修正。所以對于捷聯慣導系統而言,從軟件算法和硬件設計上提高其短時間的精度和穩定性,降低陀螺儀、加速度計的噪聲干擾、累積誤差顯得尤其重要。文中采用商用級的MEMS陀螺儀、加速度計、磁阻傳感器器件設計低成本的MIMU,采用雙DSP進行控制與解算工作,配合無跡卡爾曼濾波和小波自適應閥值降噪等方法,在降低系統成本,提高系統的集成度的同時保證導航系統可以達到商用導航系統對速率及精度的要求。
1 捷聯慣導系統硬件設計
所研制的捷聯慣導系統主要包括:微慣性測量單元(MIMU)、信號采集和預處理單元、導航解算單元。完整的捷聯慣導系統如圖1所示。
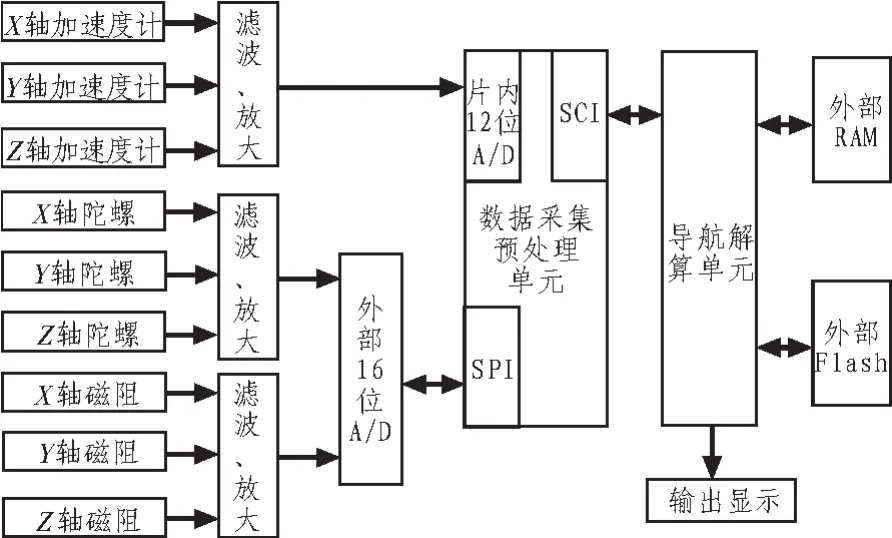
圖1 捷聯慣導系統硬件框圖Fig.1 Hardware diagram of inertial navigation system
前端的微慣性測量單元MIMU是捷聯慣導系統最重要部分,后端的信號處理、算法優化等都無法根本改變系統特性,所以該部分傳感器數據的精度以及穩定性直接決定了導航系統的精度和性能級別。這里選取的MEMS陀螺儀為ADI公司的ADXRS623,ADXRS623是一款單軸、低成本、功能完整角速率傳感器,靈敏度為 12.5 mV/°/s,測量范圍為±150°/s(5 V基準電壓)。并且可以利用外部電容可以選擇1~3 000 Hz范圍內的帶寬。利用溫度輸出端可以對傳感器進行溫度校準;MEMS加速度計選取ADI公司的ADXL335,ADXL335是一款4 mm×4 mm×1.45 mm小尺寸、低功耗、完整的三軸加速度計,能以最小±3 g的滿量程范圍測量加速度;MEMS磁阻傳感器選擇霍尼韋爾的HMC1043,HMC1043是一款小型3-軸表面安裝的傳感器序列系統,適用于低磁場磁性傳感,其體積微小、功耗低、磁場(量程)范圍寬(+/-6 Oe)。
DSP數據采集單元選取TI公司的TMS320F28335,該芯片具有150 MHz的高速處理能力,具備32位浮點處理單元,適合導航系統高速的浮點型數據處理,12位16通道ADC可以應用于加速度計信號采集。由于對于陀螺、磁阻傳感器的采樣精度要求高,所以選取TI公司的ADS8345,ADS8345具有最高100 Ksps的采樣速率、8采樣通道,滿足本系統速度以及通道數的要求,DSP通過SPI接口完成外部16位AD的控制和數據采集,并且通過串口將預處理后的傳感器信號上傳到上端導航解算單元。導航解算單元數據處理芯片同樣選取性價比較高的浮點型TMS320F28335,并且外部擴充1 M的RAM和1 M的Flash以滿足系統要求。功能上主要完成MEMS陀螺、加速度計預處理數據的接收,以及導航系統姿態、速度、位置信息的解算與顯示。
2 捷聯慣導系統軟件設計
研制的慣導系統軟件主要分為信號預處理、導航解算兩部分,信號預處理主要包括磁阻羅差補償,初始對準、傳感器數據的零位補償、溫度補償、降噪處理等。其中本系統根據樣機實際運行情況采用基于最小二乘法的7項羅差校正公式完成羅差補償[9-10],另外采用無色卡爾曼濾波(UKF)算法[11]對靜基座下的捷聯慣導系統進行初始對準,并且利用小波閥值降噪方法[12]以消減傳感器信號中噪聲的影響,實驗結果表明該方法有明顯的降噪效果。導航解算則采用基本的四元數方法。系統軟件流程如圖2所示。
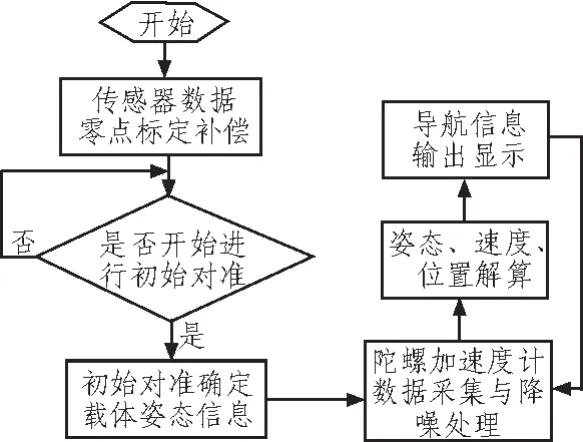
圖2 捷聯慣導系統軟件框圖Fig.2 Software diagram of inertial navigation system
3 系統實驗結果
研制成的原理樣機的捷聯慣導單元信號輸出速率為80 Hz,對研制出的原理樣機利用轉臺進行靜基座下初始對準,所選用轉臺的精度誤差在6’以內,最小分度單位為0.01°,慣導系統初始姿態給定為(航向角 161°,俯仰角 3.5°,橫滾角-4°),對于實測的傳感器數據采用UKF算法進行初始對準,初始對準的姿態角誤差如圖3所示,由圖中可以看出,50 s之內俯仰角誤差和橫滾角誤差在6’以內,航向角誤差在20’以內,且均趨于穩定。航向角的收斂速度較慢,但穩定后精度較俯仰角和橫滾角更高,可以達到系統精度要求。
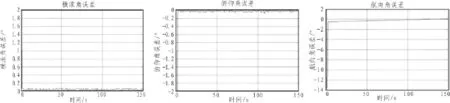
圖3 初始對準姿態誤差角Fig.3 Initial alignment attitude angle error
在靜態試驗下經過實驗得到的結果:圖4為X、Y、Z三軸MEMS陀螺儀原始信號與通過小波自適應閥值降噪后的陀螺去噪信號對比圖,由圖可以看出經過降噪后,噪聲得到很好的抑制,尖峰值、奇異值等基本消除;圖5為經姿態解算得到的姿態信息,可以看出航向角、橫滾角及俯仰角在60 s左右的時間內偏移小于0.1°,滿足導航系統要求。
利用轉臺對系統進行動態性能測試,這里以航向角動態測試為例,將系統與轉臺航向角零度對準,轉臺轉動速率設置為5°/s,每轉動20°記錄一次系統航向角輸出,表1為實際轉動角度與系統實測輸出數據的對比,由表1可以看出,系統轉動180°的過程中,其最大航向角誤差小于0.25°,實測數據說明系統在動態轉動中航向角可以達到很好的導航精度。
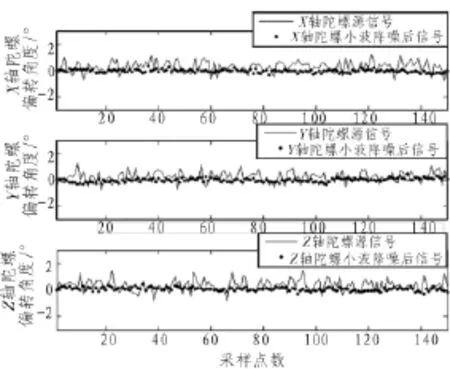
圖4 三軸MEMS陀螺儀信號預處理Fig.4 MEMS gyroscopes signal preprocessing

圖5 姿態解算信息Fig.5 Attitude solving algorithm information

表1 系統航向角動態測試數據Tab.1 System course Angle dynamic test data
4 結 論
由實驗結果可以看出,采用商用級的MEMS陀螺、加速度計及磁阻傳感器配合DSP處理設計的低成本、集成化的捷聯慣導系統,能夠將無跡卡爾曼濾波、小波自適應閥值降噪等算法應用到系統初始對準、導航解算當中,在完整實現導航系統功能的同時,提高了系統實際應用的精度和穩定性,因此可以廣泛應用于實際導航領域中。后續可以采用性能更好的前端傳感器配合高效的導航算法和信號處理方法實現可以達到的戰術級或是導航級的導航系統。
[1]劉俊,石云波,李杰.微慣性技術[M].北京:電子工業出版社,2005.
[2]秦永元.慣性導航[M].北京:科學出版社,2006.
[3]方靖,顧啟泰,丁天懷.捷聯式微慣性導航系統的標定方法[J].彈箭與制導學報,2007,27(5):29-32.
FANG Qing,GU Qi-tai,DING Tian-huai.Calibration method of inertial navigation system[J].Arrow and Guidance Journal,2007,27(5):29-32.
[4]Bernstein J.An overview of MEMS inertial sensing technology[J].Sensors,2003,20(2):14-21.
[5]胡士峰,馬建倉,孟凡路.基于MEMS傳感器的微慣性導航系統研究[J].計算機測量與控制,2009,17(5):1015-1018.
HU Shi-feng, MA Jian-cang, MENG Fan-lu.Research of micro inertial navigation system based on MEMS sensors[J].Computer Control and Measurement,2009,17(5):1015-1018.
[6]Wang J H.Intelligent MEMS INS/GPS integration for land vehicle navigation[D].Alberta:University of Calgary,2006.
[7]Abdel-hamid W.Accuracy enhancementof integrated MEMS-IMU/GPS system forland vehicularnavigation applications[D].Alberta:University of Calgary,2005.
[8]李艷華,房建成,賈志凱.INS/GPS/CNS組合導航系統仿真研究[J].中國慣性技術學報,2002,10(6):6-17.
LIYan-hua,FANG Jian-cheng,JIA Zhi-kai.Simulation research of INS/GPS/CNS system [J].Journal of Chinese Inertial Technology, 2002,10(6):6-17.
[9]Goldenbery F.Geomagnetic navigation beyond the magnetic compass[C]//Position, Location and Navigation Symposium.[S.L.]:IEEE/ION,2006:684-694.
[10]劉詩斌.無人機磁航向測量的自動羅差補償研究[J].航空學報,2007,28(2):411-414.
LIU Shi-bin.Study on automatic magnetic deviation compensation of magnetic heading measurement for UAV[J].Aviation Journal,2007,28(2):411-414.
[11]YAN Gong-min,YAN Wei-sheng, XU De-min.The apllication of simplified UKF in SINS initial alignment[J].Journal of Chinese Inertial Technology, 2008,16(3):253-264.
[12]歐陽春娟,歐陽迎春,楊春生.基于小波變換的自適應模糊閥值去噪算法[J].計算機工程與應用,2006,42(5):82-84.
OUYANG Chun-juan,OUYANG Ying-chun,YANG Chunsheng.Adaptive fuzzy threshold denoising algorithm based on wavelet transform[J].Computer Engineering and Application,2006,42(5):82-84.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32