AGV系統技術分析
2011-10-12 03:06:12王勇
中國科技信息 2011年4期
關鍵詞:系統
王勇
云南機電職業技術學院,云南 昆明 650203
AGV系統技術分析
王勇
云南機電職業技術學院,云南 昆明 650203
本文闡述并比對了工業應用中的自動導引車類型、系統組成,歸納了AGV系統的技術指標、發展趨勢等。
AGV;運動模型;定位精度;系統穩定性
前言
從上世紀50年代開始,自動導引小車(Auto guide vehicle,簡稱AGV)在國外已有簡單功能的應用。經過半個多世紀的發展,追求先進管理水平的企業逐漸在生產線上,引入AGV參與生產流程,從而減少員工活動對生產質量、管理效率的影響。 現今,包括瑞典NDC公司(已被美國DANAHERMOTION公司兼并)、比利時EGEMIN公司,美國的HK系統公司、日本大福公司、中國沈陽新松公司、昆明船舶公司等均有面向用戶的AGV開發軟件或應用系統,紛繁別類,目不暇接。
本文從AGV系統的工業應用出發,闡述并比對現今AGV系統的類型、車載控制系統的組成、技術指標、AGV發展趨勢等若干方面,力求為用戶在AGV選型、應用方面提供幫助。
1.AGV的類型
1.1 基于導引形式對AGV類型劃分

圖1 SD型AGV的四種常見型式
在工業中應用的AGV類型主要有:電磁導引;磁帶導引;慣性導航;視覺導引;激光導引。
1.2.基于運動模型對AGV類型劃分
主要應用的AGV類型有: SD型(steer drive);萬向QD型(Quad)。
SD型AGV,只有一個驅動且轉向輪,發展變形后的SD類型AGV,有四個或更多的車輪,見圖1常見的四種SD型式AGV,帶叉的圓表示參考點,圖中長方形表示普通固定輪,陰影長方形表示驅動輪,帶箭頭的弧線表示轉向。
萬向(QD)型AGV,至少有兩個驅動且轉向輪,兩個支撐腳輪,基本型是四輪結構。常見的差動(DD)型AGV,只是QD型AGV的一種運動模式而已。萬向(QD)型AGV異常靈活,能用匪夷所思的運行姿態循跡運動,在狹窄的空間,萬向(QD)型AGV能發揮自身特點,進行裝卸貨。發展變形后的QD型AGV,有遠遠多于2個的驅動且轉向輪、遠遠多于2個的支撐腳輪,因此能載重更大的重量,是AGV發展的方向,例如NDC公司的QD型AGV,最多已經達到10個驅動且轉向輪。圖2所示的是QD型的五種常見型式,圖中帶圓圈的長方形表示支撐腳輪。
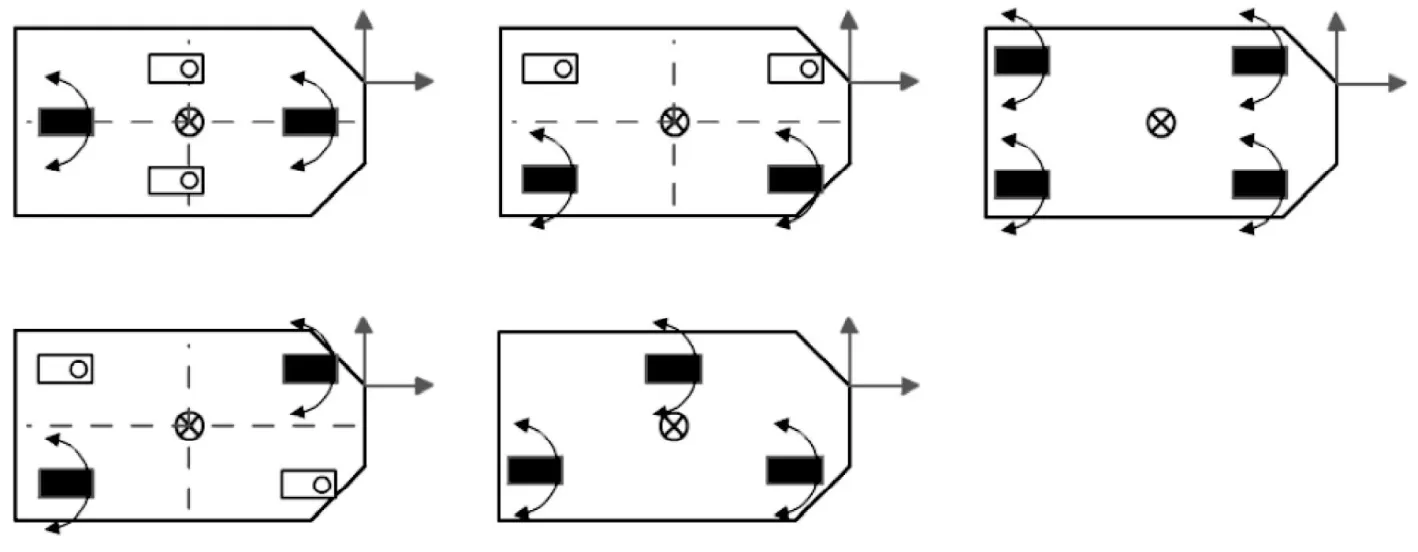
圖2 QD型AGV的五種常見型式
當前廣泛使用的AGV類型是SD激光導引AGV,在一些空間限制、載重要求高的場合,QD型AGV也有使用。
2.AGV控制系統的組成
AGV的控制系統由上位監控、AGV單機、輔助系統組成[2]。典型AGV系統的構成框圖見圖3。

圖3 典型AGV系統構成
2.1 AGV的上位監控
通過實時通訊,實現對系統AGV的命令管理、車輛管理、交通管理,同時,典型的上位系統還能實施圖形監控AGV。
2.2 AGV單機控制部分
包括車載控制器、通訊接口單元、導航單元等。
車載控制器的早期產品是功能接近PLC的控制器,或者工控機結合PLC的用法(例如運動控制單元、IO單元等均通過PC104總線與核心控制器相連);NDC公司前期的7、7S系統,用的是定做的專用AGV控制器,編程更方便靈活,但成本高;如今的車載控制器,采用更開放的硬件平臺,基于CAN總線和第三方硬件外聯,形成擴展方便、功能強大的AGV控制器。
AGV的通訊單元:過去常用無線調制解調通訊;現在使用的是無線局域網(WI-FI)通訊,通過各個AP無線接入點間信號的無縫連接,實現數據傳輸。
導航單元:常用的有電磁導引頻率發生器、探測器,慣性導引陀螺儀,激光導引激光掃描頭(主要有NDC和Sick兩品牌)。
2.3 AGV的輔助系統
實施AGV項目,應具備完成特定功能的軟件和符合運行模式的充電機。
2.3.1 完成AGV項目所需軟件及其具有的功能見表1。

表1 實施AGV系統的相關軟件
2.3.2 AGV充電機的工作模式
離線充電:(實際應用中沒有采取這種模式的實例);
涓流充電:0.2C倍率小電流涓充;
快速充電[1]:2C倍率大電流充電,發熱高,效能低,屬于破壞性使用,但由于充電時間短,可節省系統中AGV的數量,因此得到推廣。較成熟運用于此種模式的蓄電池有鎳鉻蓄電池(鎳氫電池也可大電流充電,但技術還不成熟)。
3.AGV系統的技術指標
表2中指標可以反映系統的穩定性、可靠性、先進性。

表2 AGV系統的技術指標
4.AGV系統的發展趨勢
AGV技術是一項高端技術,綜合了導航技術、制導控制技術、通訊技術、電池技術等。它正朝著開放式的通用器件平臺,分布式總線結構,重載AGV,多驅動輪(超過2個驅動輪)技術、電機的交流化等趨勢發展,解決運載能力、成本、可靠性、靈活性和定位精度等性能是將來AGV技術發展的趨勢。
5.結束語
盡管AGV的應用越來越廣泛,國內也有將近1000臺AGV在不同生產領域運行,但在衡量AGV系統的指標上,至今沒有一項成文的標準,這無形中也使AGV技術在發展中出現很多以次充好的系統。本文中列舉的指標量值,也僅僅是實際運用中總結的經驗值。要推進AGV技術快速發展,有必要建立一個能準確考量AGV系統的技術標準。
[1]片春媛,劉俊峰.應用于AGV自動導引車的快速充電系統 [J].電化學.2008,14(1)
[2]楊文華,王 勇.激光導引AGV 系統原理及運用 [J].機器人技術與應用.2000,3
10.3969/j.issn.1001-8972.2011.04.050
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32