圖像輪廓的點坐標的提取方法及VC++編程實現
2011-10-16 11:39:00劉偉學
赤峰學院學報·自然科學版 2011年3期
關鍵詞:方法
劉偉學
(赤峰學院 計算機科學與技術系,內蒙古 赤峰 024000)
圖像輪廓的點坐標的提取方法及VC++編程實現
劉偉學
(赤峰學院 計算機科學與技術系,內蒙古 赤峰 024000)
本文介紹了一種基于位圖圖像輪廓提取與跟蹤的算法原理,提出了基于該原理進行提取圖像輪廓的點坐標系列的方法,并分析了應用該方法可能出現的問題及相應的解決辦法,最后給出了該方法的VC++編程實現.
輪廓提取;輪廓跟蹤;點坐標
1 引言
近年來,學者們提出了許多光柵圖像(以位圖為例,以下稱位圖)矢量化技術在CAD/CAM系統中的應用.如絎縫圖案畫稿自動生成系統、刺繡畫稿自動生成系統等.位圖矢量化融合了計算機圖形學、數字圖像處理、模式識別、軟件設計等多學科的技術.在各種基于位圖圖像輪廓的畫稿自動生成系統中,其位圖矢量化的一般處理流程為:除去噪聲,二值化,輪廓提取,矢量輪廓圖形生成.圖像的去噪與二值化方法直接影響后續處理中的輪廓提取效果的好壞.本文中對此不作討論,并以經過去噪且以恰當閥值分割后的二值圖像作為圖像輪廓提取處理的輸入,探討在此基礎提取輪廓的點坐標系列的方法和VC++的編程實現.
2 輪廓提取與跟蹤的基本原理
輪廓提取的算法非常簡單,就是掏空內部點.假設二值圖像中黑色為目標,白色為背景,則如果源圖中有一點為黑,且它的8個相鄰點都是黑色時,此點即為內部點,應將其刪除.因此該算法實際是對圖像的各像素進行掃描,對于這里討論的二值圖像來說則只需考慮黑點.對圖像中的每個圖點,考慮其上、下、左、右的八個鄰點,如果其全為黑,則說明該點為物體的內部點,可以去除(變為背景點:白點),否則保留.如果前面的去噪與二值化處理的效果理想的話,該算法提取圖像目標輪廓沒有什么問題,這里不作詳細討論.下面重點討論在經過輪廓提取處理后得到輪廓圖像提取點坐標系列的方法.該方法基于邊界跟蹤算法,故下面先對邊界跟蹤算法作一介紹.
在識別圖像中的目標時,往往需要對目標邊緣作跟蹤處理,也叫輪廓跟蹤.顧名思義,輪廓跟蹤就是通過順序找出邊緣點來跟蹤邊界的.若圖像是二值圖像或圖像中不同區域具有不同的像素值,但每個區域內的像素值是相同的,則如下算法可完成基于4連通或8連通區域的輪廓跟蹤.為了敘述問題的方便,假設待處理圖像為二值輪廓圖像,即背景點為白點,輪廓點為黑點.對于不同區域具有不同像素值的圖像,其處理方法類似,或者可先將其處理為二值圖像再用如下算法進行處理.
2.1 按從上到下,從左到右的順序掃描位圖圖像像素矩陣,尋找沒有標記跟蹤結束記號的第一個界起始點A0,A0是具有最小行和列值的邊界點.注意:此時的邊界點其實是圖像的最左下角的邊界點.定義一個掃描方向變量dir,該變量用于記錄上一步中沿著前一個邊界點到當前邊界點的移動方向,按上述掃描第一個邊界點的順序,其初始化取值為:對4連通區域取dir=0,如圖 1所示;對 8連通區域取dir=7,如圖2所示.
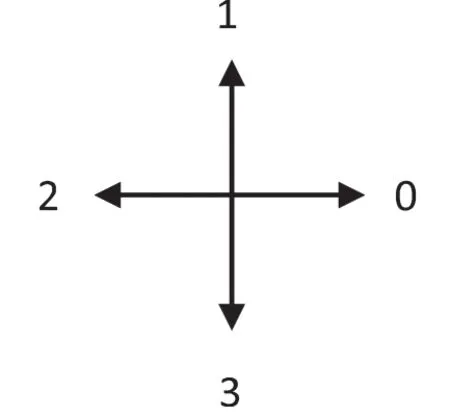
圖1 四連通區域方向示意圖
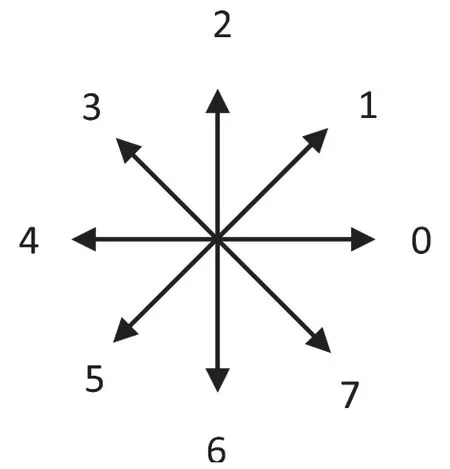
圖2 八連通區域方向示意圖
2.2 按逆時針方向搜索當前像素點的3×3鄰域,如果搜索到邊界點(黑點)時,則將該邊界點作為新的當前像素點,且更改搜索方向,其方法為:對4連通區域取(dir-2)mod 4,對8連通區域取(dir-2)mod 8;否則以原當前像素點為中心逆時針繼續搜索,由當前搜索方向求下一個搜索方向的方法為:對4連通區域取(dir+1)mod 4,對8連通區域取(dir+1)mod 8.
2.3 如果搜索的下一個像素點等于第一個邊界點A0或者越界,則停止搜索,結束跟蹤,否則重復步驟(2)繼續搜索.
2.4 由起始邊界點沿著跟蹤路徑再到起始邊界點構成的邊界即為要跟蹤的邊界.
其中算法中(1)所采用的準則稱為“探測準則”,其作用是找出第一個邊界點;(3)中所采用的準則稱為“跟蹤準則”,其作用是找出所有邊界點.
3 圖像輪廓的點坐標系列的提取方法
運用該跟蹤算法提取圖像輪廓的點坐標系列就是要按邊界跟算法中點搜索的順序將邊界點的坐標系列存儲起來.運用上述邊界跟蹤算法提取點坐標系列還需考慮如下問題:
3.1 完成一次跟蹤只能提取一段邊界.對于有若干不連續的邊界,必須重復跟蹤,而對于已跟蹤的邊界必須去除.去除的可能辦法有二種:一是邊跟蹤邊去除,二是跟蹤完一段后再一起去除.實驗中發現第一種方法不可行,其原因是在邊跟蹤邊去除邊界點時,無法滿足上述算法中(3)所述搜索終止條件.故宜采用第二種方法.
3.2 對于跟蹤的邊界點坐標須用一點坐標數組存儲起來,點坐標系列順序按跟蹤順序保存,這一順序即是將邊界圖像矢量化為矢量圖元的順序.
3.3 邊界點坐標的數據結構.因為邊界圖像可能有若干不連續邊界,故記錄這些不連續的邊界點坐標通常有兩種方法.一是采用鏈表的形式,鏈中每一結點兩個字段:一個邊界段的點坐標數組及該邊界段的點數組成的結構體,指向下一個結點的指針.二是用線性表的形式,一個點坐標數組存儲所有邊界點的坐標,另用一個結構體記錄邊界點總點數,總段數及每段的坐標點數.對于這兩種數據結構的選擇取決于邊界圖像是否為最終目標圖像邊界,如是,則采用線性表的形式處理更容易;如不是,即后續處理中還需對邊界進行修正,則采用鏈表的形式處理更方便.
3.4 對于非常少的點數的邊界段的處理問題.通常這類邊界往往是噪聲形成的,應該在處理中去除.但也不盡然,在細節較為豐富的邊界圖像中,可能這些較少點數的邊界段也是有用信息.故實驗中采取人機交互的辦法.通過對話框讓用戶根據不同特征的邊界圖像提供一個臨界值來確定多少個點數組成的邊界為噪聲.
3.5 對確定為噪聲的邊界段去除辦法.應根據邊界點的數據結構作相應處理.
4 VC++程序實現
輪廓跟蹤提取邊界點坐標系列的算法函數TraceDIB()原型如下:
下面對其作簡要說明.CsplitProc為類名,TraceDIB為該類的成員函數,函數輸入為二值圖像的句柄,輸出有:輪廓總點數,總段數,輪廓點坐標以及各段點數.函數參數說明:hDIB為待處理的圖像句柄,由此可訪問到圖像中各像素的灰度值;dwCountPints為圖像輪廓的點數,為引用型變量,函數中對此變量的修改即是對所引用的變量的修改;dw-CountSg為圖像的輪廓的段數(這里把根據上述輪廓跟蹤算法結束時得到的輪廓段稱為一段),也采用引用型變量,其含義同上;lpPoints為指向點坐標數組的指針,為指針型變量,函數中通過該指針即可訪問到存放點坐標的數組;lpSg-Points為指向存放各段點數的雙字型數組,函數中通過該指針可訪問到存放各段點數的數組.函數實現方法簡述如下:按上述輪廓跟蹤算法不斷跟蹤圖像輪廓:每跟蹤到一個點時,記錄該點坐標,輪廓點數增1;每跟蹤完一段后,段數增1,數并記錄該段的點數;直到所有輪廓點跟蹤完畢.為了在輪廓跟蹤過程中對某些少數點組成的圖段(可能為噪聲)去除,可在處理時提供對話框由用戶設定噪聲邊界點數的臨界值,這樣既可去除噪聲,又不至于將有用的細節丟失.如圖3所示的源圖像,經過該函數處理后,將其邊界點坐標系列信息保存于文件中,將其重新繪制得到的邊界圖形如圖4所示.可見源圖像的噪聲得到了去除,但同時也損失了一些邊界細節.此時的噪聲邊界點數臨界值為100,適當修改該值,可得到不同的處理效果.

圖3 待處理的含有噪聲的輪廓圖
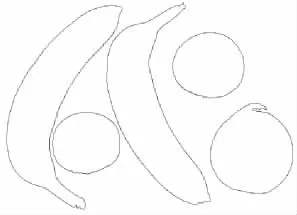
圖4 提取輪廓點坐標后重新繪制圖形
4 結論與展望
上述運用輪廓跟蹤提取邊界點坐標系列的方法通過實驗表明在一定條件下是可行的.對于噪聲與圖像有用邊界很分明的圖像去噪效果很好,但對于圖像細節與噪聲難以分辨的圖像去噪與保留細節是一對矛盾.對于邊界中無交叉的情況提取點坐標系列無重復邊界點,否則按此邊界搜索算法將會有重復邊界點.以上問題仍需進一步研究,如采用人工交互的辦法去除噪聲點,對有交叉點的邊界應予以特殊處理,去除重復邊界點等.
〔1〕高守傳.VisualC++實踐與提高-數字圖像處理與工程應用篇[M].中國鐵道出版社,2006.
〔2〕余學軍,彭立中.二值圖像曲線輪廓提取的新算法[J].中國圖像圖形學報,2002(3).
〔3〕孫景榮,許錄平.一種改進的圖形矢量化方法[J].計算機工程及應用,2004(1).
〔4〕劉安心,余躍慶,等.三維機器視覺測量系統圖像邊緣提取算法研究 [J].機械制造與自動化,2006,35(1):101-103,106.
TP39
A
1673-260X(2011)03-0039-02
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
