基于直線電動機驅動的2X-Y聯動進給軸圓輪廓誤差測試研究*
2011-10-18 14:34:10林獻坤韓世卓
制造技術與機床 2011年9期
林獻坤 袁 博 韓世卓
(上海理工大學機械工程學院,上海200093)
現代數控機床正朝著精密、高速、復合、智能的方向發展,高精度、高速切削加工對數控機床的進給機構及其控制都提出了更高的要求。在傳統進給系統中,旋轉電動機帶動滾珠絲杠副的傳動機構存在反向間隙、慣性、摩擦力和剛性不足等問題,保證一定精度要求需要以犧牲速度為前提。而直線電動機是一種沒有任何中間轉換機構的傳動裝置,直接將電能轉換成直線運動機械能,主要具有進給速度快、加速度大、快速響應、定位精度高、無行程限制、效率高、運動噪聲低等優點[1],應用直線電動機驅動高速機床正成為新一代數控機床的具有代表性的先進技術之一[2]。
采用龍門柱固定的傳統龍門機床難以獲得高的加速度,同時又受到工作臺的長度和工作場所限制[3]。由雙直線電動機驅動的龍門移動式機床讓工作臺與工件保持靜止,龍門立柱質量相對較小,可以獲得較高的加速度特性,發揮了直線電動機快速響應的優越性[4]。因此,基于直線電動機驅動的2X-Y聯動軸進給機構是當前高速機床的一個重要發展方向,它的驅動特性也成為一個必要的研究課題。
精密、超精密加工已經成為現代制造業中技術競爭的關鍵領域,而高速切削帶來的突出問題之一是輪廓精度隨加工速度的提高而下降,輪廓精度直接影響到工件的加工精度。圓輪廓是切削加工過程中的一種典型輪廓,其精度直接影響工件的圓度和圓柱度。文獻[5]探討了直線電動機在超精密加工技術中的應用和發展,文獻[6]對一臺由旋轉電動機驅動的加工中心圓輪廓誤差與圓半徑、進給速度之間的關系進行了研究。而對于由直線電動機驅動的數控機床圓輪廓誤差特性少有相關研究。
本文以自構建的直線電動機驅動進給實驗臺為對象,圍繞直線電動機驅動的2X-Y聯動進給軸平面圓輪廓誤差進行測試研究,給出分析結果以指導實際加工,推動直線電動機在數控機床上的應用。
1 2X-Y聯動進給軸圓輪廓誤差評定
1.1 構建2X-Y聯動進給軸實驗平臺
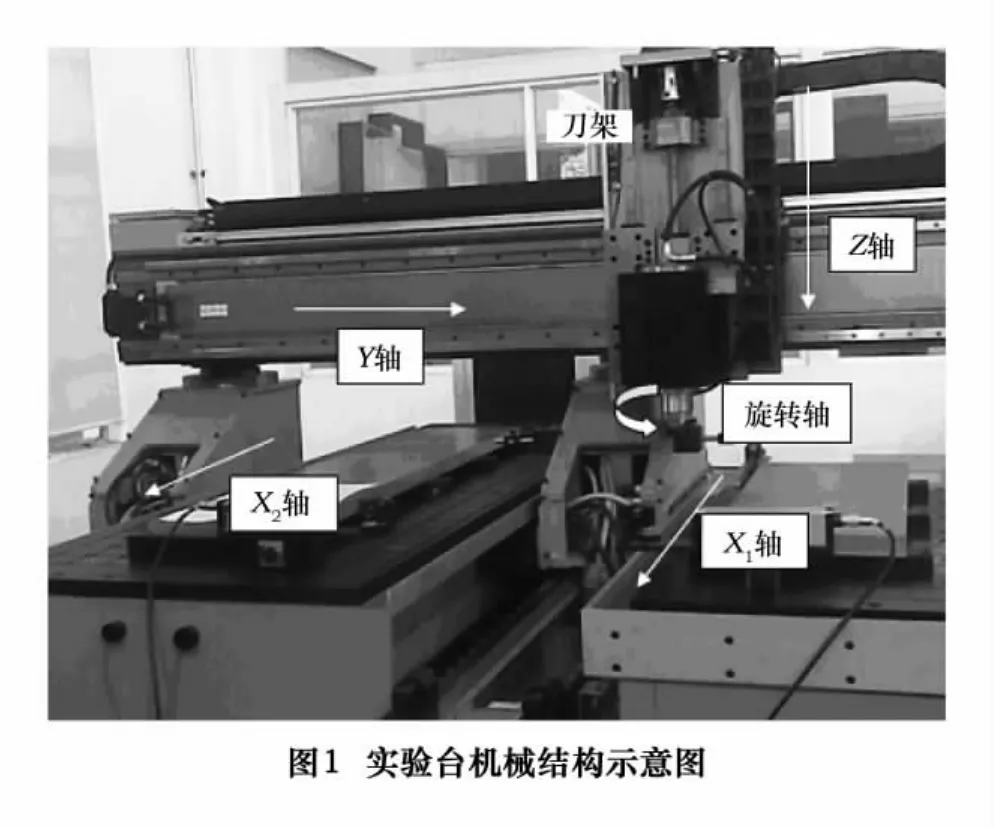
本實驗測試研究的龍門移動式實驗平臺如圖1所示,其中龍門柱在X方向上配備2臺直線電動機,龍門橫梁上的立式加工刀架在Y方向上配備1臺直線電動機,直線電動機為西門子公司的扁平型短初級系列,型號為1FN3300-3NC40和1FN3300-3NC10。
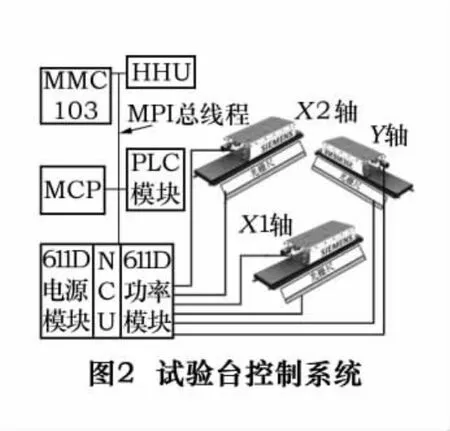
該直線電動機試驗臺配備了西門子840D數控系統,系統組成如圖2所示。西門子840D數控系統的功能由以下4部分構成:人機界面HMI、可編程控制器 PLC、數控內核NCK、數字式交流伺服驅動SIMODRIVE 611D。硬件結構主要包括840D操作面板(MMC103)、機床控制面板(MCP)、手持單元(HHU)、PLC模塊、數字控制單元(NCU)、611D主電源模塊和功率模塊。在位置定位方面,X軸配備2套、Y軸配備1套海德漢NLC183型號的光柵尺,構成進給軸的全閉環定位控制系統。
直線電動機試驗臺的龍門橋式結構具有基于雙直線電動機驅動的可調節同步進給控制功能,其中X1和X2軸可以同步進給運行,也可以獨立進給運行。應用840D系統 NC編程功能,執行同步指令TRAILON和TRAILOF,可在MDI模式下靈活地實現兩X軸的同步進給或獨立進給。
在機床各軸回零位后,運行指令TRAILON(X2,X1),實現了以X1軸為主動軸,X2軸為從動軸的兩X軸同步進給運行,從而構建了在XOY坐標系上的基于直線電動機驅動的2X-Y聯動進給軸實驗平臺。
1.2 圓輪廓誤差的評定方法
圓輪廓誤差在XOY平面內的表現為圓度誤差,圓度誤差是指實測圓與理想圓的偏離程度。理想圓的選擇不同,圓度誤差的評定方法就不同。在評價圓度誤差方面有最小二乘圓法、最小外接圓法、最大內接圓法和最小區域法。在這些圓度誤差評價方法中都是以實測圓輪廓本身的坐標位置進行輪廓評價的,在評價過程中沒考慮到實測輪廓與數控指令理想輪廓圓的背離程度。通過應用數控程序中的指令圓作為理想評定圓,能更好地體現數控機床各軸進給運動與數控指令吻合程度這一機床特性。以數控指令圓作為理想評定圓,針對整體圓輪廓形狀的偏差和具體各個點的位置偏差量,存在2種圓度誤差值大小的表現形式:
(1)圓度的偏差
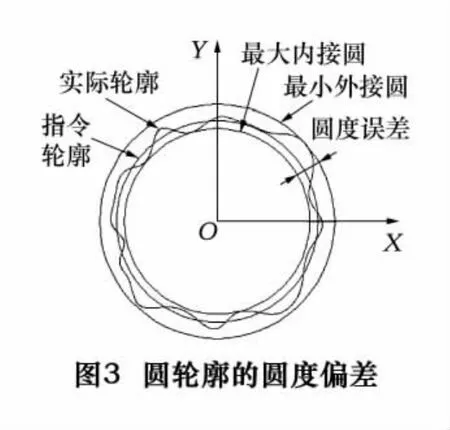
如圖3所示,在XOY坐標系中分別找出與指令圓同心的最大外接圓和最小內接圓,2個圓的半徑差值為圓度偏差,圓度的偏差體現了加工圓輪廓形狀上與指令圓的相似程度。
(2)圓度的均方根偏差
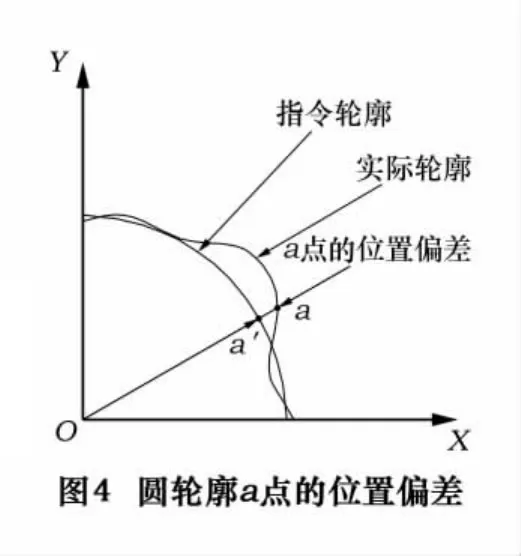
圖4所示為XOY坐標系中實際輪廓軌跡在某一點a的位置偏差示意圖,實際加工軌跡在a點時,與它最接近的指令輪廓上的位置為a'點,2點的距離aa'為圓輪廓在a點的位置偏差。計算加工圓輪廓1個圓周期上各個點的位置偏差的均方根差,把這個均方根值稱作為圓輪廓的均方根偏差。均方根偏差的大小反映了加工圓輪廓與指令圓輪廓的位置偏差量。
2 圓輪廓誤差測試方法
2.1 測試方案及原理
由圖1中可以看到,研究2X-Y聯動軸的圓輪廓誤差特性,需要監測由這個聯動軸驅動進給的立式加工刀架在XOY坐標系中的運動軌跡,而在XOY坐標系中的任意位移量可以分解為在X方向和Y方向上的位移量,因此,需要在X和Y兩個方向上對刀架同時進行高頻率的連續位移測量。
激光干涉儀在機床上進行測量工作具有精度高、響應快、頻率高、測量運動物體靈活方便等特點[8],它是利用反射鏡移動時對激光束反射所產生的激光頻率的多普勒頻移來進行位移測量。激光多普勒測量原理如圖5所示。

圖中激光頭射出的頻率為f0,經平行反射鏡反射回到探測器,當平行反射鏡不動時,其反射波頻率fr=f0。當反射鏡以v的速度移動時(v=dx/dt,相互遠離時取“+”,相互移近時取“-”),因為光程增加(減少)了 2vt,反射波fr的數值會減少(增加)2v/λ0(λ0為激光波長),即:

由此可得在時間t內激光頭與反射鏡間的相對運動距離x為

激光多普勒測量儀采用相位探測器用來偵測相位偏移,對于每一位移的半波長,也就是相位Φ積滿1個周期2π,探測器發出1個增位或減位脈沖信號,通過脈沖數可得知位移x,即

式中:N為積分滿1個周期2π的周期數,ΔΦ/2π是未滿1個周期的余量。
用激光干涉儀在X方向和Y方向采集到的按時間順序的位移值序列分別記為x1、x2…xn和y1、y2…yn,并且x1、x2…和y1、y2…存在一一對應關系。為了找到一個圓周期的數據,對x序列進行二次微分,找到x序列中兩個相鄰的極大值xt和xt+u,以及極小值xt+b,其中0 <b<u。序列xt+1、xt+2…xt+u和對應的序列yt+1、yt+2…yt+u擬合成了1個圓周期的圓輪廓。我們可以認為在XOY坐標系中,相差半個圓周運行時間所采集到的2 點(xt+i,yt+i)、(xt+b+i,yt+b+i)的中點為測量圓的近似圓心坐標,其中0<i≤b,再用近似圓心坐標值的算術平均值來估算指令圓的圓心坐標:

加工圓輪廓上的任意測量點到指令圓心的距離為

其中0<j≤u,根據誤差評定方法可以得到圓度偏差的表達式為

設指令圓的半徑為R0,每個測量點的位置偏差表達式為

取1個圓周期的測量點,得到圓輪廓的二次均方根差表達式為

2.2 測試步驟
測試過程選用美國光動公司的MCV-500激光多普勒位移測量系統,它具有0.1 μm測量精度,測量范圍為數微米到數米[7]。具體實驗步驟如下:
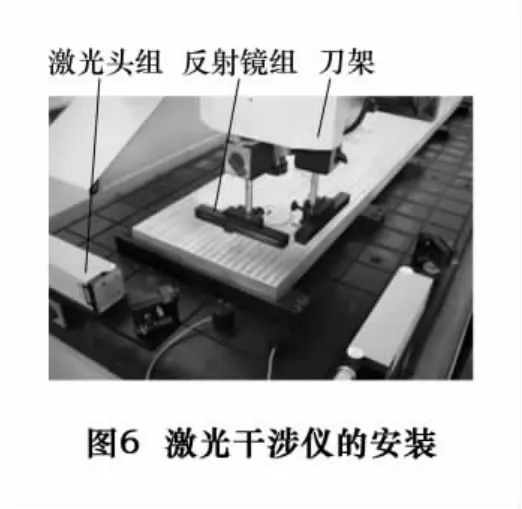
(1)安裝測試組件。按照圖6所示,將帶有平面反射鏡的磁性座固定在需要測試的刀架位置,將帶有分光鏡的激光頭組件固定在試驗臺床身上,并將空氣溫度與氣壓傳感器和材料溫度傳感器固定在激光光路附近的床身上。
(2)連接激光干涉儀測各組件,并通過2張PCI采集卡連接筆記本計算機,打開激光干涉儀開關和計算機。
(3)在反射鏡上加上磁性對光標靶,移動刀架,反復調整激光頭組件的分光鏡,使激光光束始終對準標靶中心以確定2組激光測量方向為X方向和Y方向。
(4)取下磁性標靶,調整反射鏡,使射在反射鏡上的激光光束能始終反射回激光頭組件的接收孔。
(5)開啟激光測量儀2D時間基準測量畫面,設定頻率、持續時間等測量參數。
(6)按照測試程序運動直線電動機試驗臺,采集測量數據及保存結果。
(7)輸出結果及數據處理。
3 測試及數據分析
實驗研究進給速度和進給加速度對2X-Y聯動軸圓輪廓誤差的影響,在MDI模式下編寫R=20 mm的逆時針圓輪廓執行程序,在不同進給速度和進給加速度的條件下運行直線電動機試驗臺,用激光干涉采集位移數據,按式(7)用MATLAB處理采集數據,得到表1所示的圓度偏差值實驗統計結果。
根據表1可以看到圓度的偏差隨進給速度增大而增大,隨加速度增大而減小,實際加工時應當避免過小的進給加速度。
同樣在不同的進給速度和加速度條件下,按式(9)處理數據,得到表2所示的圓度均方根偏差值實驗結果。

表1 不同進給速度和加速度下的圓度偏差
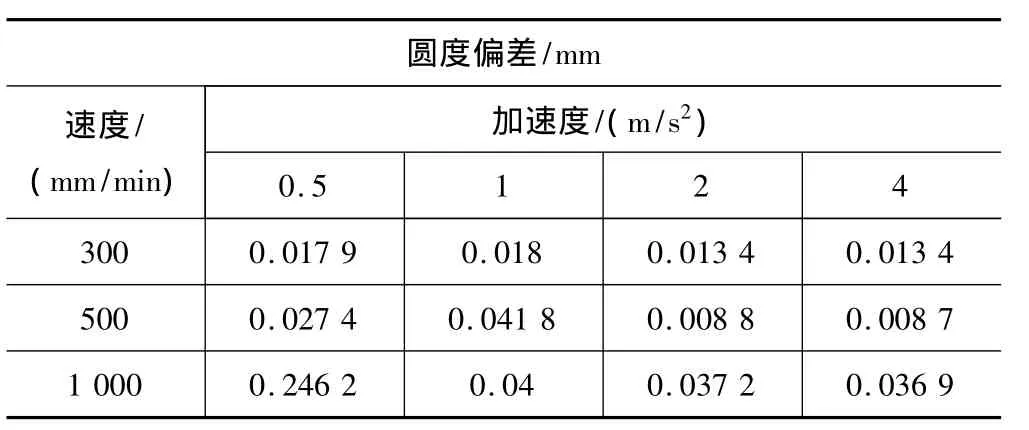
表2 不同進給速度和加速度下的圓度均方根偏差
根據表2可以看到圓度的均方根偏差同樣隨進給速度增大而增大,隨加速度增大而減小。
4 結語
基于直線電動機進給驅動的2X-Y聯動軸可以完成高精度的圓輪廓加工。根據給出的圓輪廓誤差評定標準,使用雙頻激光干涉儀對聯動軸進行圓輪廓誤差測試分析,分析結果表明圓度的偏差和均方根偏差都隨進給速度增大而增大,隨進給加速度增大而減小,應當避免1 m/s2以下過小的進給加速度。根據實驗分析出的圓度偏差和均方根偏差統計結果,可以指導基于直線電動機驅動的2X-Y聯動軸的圓輪廓加工。
[1]袁博,林獻坤.基于Gantry驅動的雙直線電動機高速動態同步誤差性能測試研究[J].制造技術與機床,2010(2):17-20.
[2]林健,汪木蘭,左健民,等.直線電動機在數控機床中的應用[J].機械制造,2008,46(521):53-56.
[3]Hsieh Min-fu,Tung Chin-Juei,Yao Wu-Sung.Servo design of a vertical axis drive using dual linear motors for high speed electric discharge machining[J].International Journal of Machine Tools & Manufacture,2007(47):546-554.
[4]代曉明,楊慶東.高架橋式龍門高速加工中心直線進給系統的設計[J].機械制造,2005,43(485):12-14.
[5]徐昌語,劉勇,張建明,等.直線電動機在超精密加工技術中的應用和發展[J].北京航空精密機械研究所,2009,45(4):13-16.
[6]陳安民.加工中心圓輪廓誤差的研究[J].機械制造與研究,2006,35(4):73-78.
[7]SIEMENS公司.SINUMERIK 810/840D簡明調試技術手冊[Z],2006.
[8]OPTODYNE.MCV-500 User’s Guide[Z],2005.