用流程圖法排除鉆床Z35電氣故障
2011-10-28 08:36:08廣東張志芳
職業(yè)技術(shù) 2011年8期
關(guān)鍵詞:故障
廣東 張志芳
用流程圖法排除鉆床Z35電氣故障
廣東 張志芳
筆者根據(jù)自己維修的實(shí)踐經(jīng)驗(yàn)和幾年實(shí)習(xí)教學(xué)總結(jié)歸納出用流程圖法來分析機(jī)床電氣故障,實(shí)踐證明,用這種方法去分析檢修機(jī)床對(duì)初學(xué)者的維修水平提高較快,就有關(guān)內(nèi)容介紹如下:第一,流程圖的概念流程圖:就是根據(jù)機(jī)床電氣故障現(xiàn)象,分步采用假設(shè)的試驗(yàn)法,然后根據(jù)電路原理圖,分析兩種不同的結(jié)果,使每一次試驗(yàn)結(jié)果都與某一小范圍故障部位相聯(lián)系,這樣把整個(gè)故障范圍逐步分小。再利用測(cè)量法,通過少數(shù)幾次的電壓,電阻或電流的測(cè)量,就能立即找到故障點(diǎn)。流程圖法是將幾種常用故障分析方法的綜臺(tái),它直觀,邏輯性強(qiáng),便于理解和掌握。適合于對(duì)復(fù)雜機(jī)床電氣線路的檢修分析。第二,流程圖使用的符號(hào)畫法。1.流程圈常使用符號(hào)如下:①用于開始,其內(nèi)寫明故障現(xiàn)象。②表示故障在這里要根據(jù)試驗(yàn)結(jié)果來分叉,結(jié)果“是”或“動(dòng)作”則從Y端流出結(jié)果,“否”或“無動(dòng)作”則從N端流出。③表示故障流向。④表示故障流向的結(jié)束,其內(nèi)容寫明故障點(diǎn)編號(hào)或某故障電器元件代號(hào)。2.流程圈的畫法從故障現(xiàn)象開始,結(jié)合電路原理圖分步試驗(yàn),并分析試驗(yàn)結(jié)果找到相對(duì)應(yīng)的故障部位在實(shí)際檢修時(shí),由于每次試驗(yàn)結(jié)果只有一個(gè),這樣就可以只順著一條分支查下去即可,通常只要經(jīng)過二、三步就可以立即找到故障點(diǎn)。
一、Z35型搖臂鉆床電路工作原理
Z35型搖臂鉆床電路圖如圖1所示:
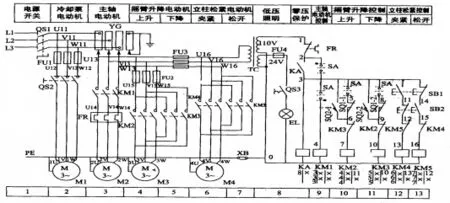
圖1 Z35型搖臂鉆床電氣原理圖
(一)主電路
Z35型搖臂鉆床共有四臺(tái)三相交流異步電動(dòng)機(jī),其中主軸電動(dòng)機(jī)M2由接觸器KM1控制,熱繼電器FR作過載保護(hù),主軸的正、反向控制是由雙向片式摩擦離合器來實(shí)現(xiàn)的。搖臂升降電動(dòng)機(jī)M3由接觸器KM2、KM3控制,F(xiàn)U2作短路保護(hù)。立柱松緊電動(dòng)機(jī)M4由接觸器KM4和KM5控制,F(xiàn)U3作短路保護(hù)。冷卻泵電動(dòng)機(jī)M1是由組合開關(guān)QS2控制,F(xiàn)U1作短路保護(hù)。搖臂上的電氣設(shè)備電源,由轉(zhuǎn)換QS1及匯流環(huán)YG引入。
(二)主軸電動(dòng)機(jī)控制
主軸電動(dòng)機(jī)M2的旋轉(zhuǎn)是通過接觸器KM1和十字開關(guān)SA控制的。十字開關(guān)由十字手柄和四個(gè)微動(dòng)開關(guān)組成。
先將電源總開關(guān)QS1合上,并將十字開關(guān)SA扳向左方,SA的觸點(diǎn)(2-3)閉合,中間繼電器KA獲電吸合并自鎖,為其他控制電路接通做好準(zhǔn)備。再將十字開關(guān)SA扳向右邊位置,這時(shí),SA的觸點(diǎn)(2-3)分?jǐn)嗪螅琒A的觸點(diǎn)(3-4)閉合,接觸器KM1線圈得電吸合,主軸電動(dòng)機(jī)M2通電旋轉(zhuǎn)。主軸的旋轉(zhuǎn)方向由主軸箱上的摩擦離合器手柄控制。將十字開關(guān)扳回中間位置,接觸器KMl線圈斷電釋放,主軸電動(dòng)機(jī)M2停轉(zhuǎn)。
(三)搖臂升降控制
搖臂升降控制是在中間繼電器KA得電并自鎖的前提下進(jìn)行的,用來調(diào)整工件與鉆頭的相對(duì)高度。搖臂升降前必須將夾緊裝置放松,升降完畢后又必須夾緊,這些動(dòng)作是通過十字開關(guān)SA,接觸器KM2、KM3,位置開關(guān)SQ1、SQ2控制電動(dòng)機(jī)M3來實(shí)現(xiàn)的。SQ1是能夠自動(dòng)復(fù)位的鼓形轉(zhuǎn)換開關(guān),其兩對(duì)觸點(diǎn)都調(diào)整在常閉狀態(tài)。SQ2是不能自動(dòng)復(fù)位的鼓形轉(zhuǎn)換開關(guān),它的兩對(duì)觸點(diǎn)調(diào)整在常開狀態(tài),由機(jī)械裝置來帶動(dòng)其通斷。
搖臂上升:將十字開關(guān)SA的手柄從中間位置扳到向上的位置,SA的觸點(diǎn)(3-5)接通,接觸器KM2得電吸合,電動(dòng)機(jī)M3啟動(dòng)正轉(zhuǎn)。由于搖臂在升降前被夾緊在立柱上,所以,M3剛啟動(dòng)時(shí),搖臂不會(huì)上升,而是通過傳動(dòng)裝置先把搖臂松開,這時(shí)鼓形組合開關(guān)SQ2-2(3-9)的常開觸點(diǎn)閉合,為搖臂上升后的夾緊做好準(zhǔn)備,隨后電動(dòng)機(jī)M3通過升降絲杠,帶動(dòng)搖臂上升。當(dāng)上升到所需位置時(shí),將十字開關(guān)SA扳列中間位置,接觸器KM2線圈斷電釋放,電動(dòng)機(jī)M3停轉(zhuǎn)。KM2互鎖常閉觸點(diǎn)(9-10)恢復(fù)閉合后,接觸器KM3線圈得電吸合,電動(dòng)機(jī)M3啟動(dòng)反轉(zhuǎn),帶動(dòng)機(jī)械夾緊機(jī)構(gòu)將搖臂夾緊,夾緊后鼓形開關(guān)SQ2-2的常開觸點(diǎn)恢復(fù)斷開狀態(tài),接觸器KM3線圈斷電釋放,電動(dòng)機(jī)M3停轉(zhuǎn),完成搖臂上升過程。
搖臂下降:可將十字開關(guān)SA扳到向下位置,動(dòng)作流程與搖臂上升相似。
為使搖臂上升或下降不致超出允許的極限位置,在搖臂上升和下降的控制電路中分別串入位置開關(guān)SQ1-1和SQ1-2作限位保護(hù)。
(四)立柱夾緊與松開的控制
立柱的夾緊與放松是通過接觸器KM4和KM5控制電動(dòng)機(jī)M4的正、反轉(zhuǎn)來實(shí)現(xiàn)的。鉆床正常工作時(shí),外立柱是夾緊在內(nèi)立柱上的,當(dāng)需要搖臂和外立柱繞內(nèi)立柱轉(zhuǎn)動(dòng)時(shí),應(yīng)先按下按鈕SB1,使接觸器KM4線圈得電吸合,電動(dòng)機(jī)M4正轉(zhuǎn),通過齒式離合器驅(qū)動(dòng)齒輪式油泵,送出高壓油,經(jīng)油路系統(tǒng)和傳動(dòng)機(jī)構(gòu)將內(nèi)外立柱松開。松開SBI,電動(dòng)機(jī)M4停轉(zhuǎn)。這時(shí),搖臂可在人力推動(dòng)下轉(zhuǎn)動(dòng),當(dāng)轉(zhuǎn)到所需位置時(shí),再按下按鈕SB2,接觸器KM5線圈得電,電動(dòng)機(jī)M4反轉(zhuǎn),在液壓推動(dòng)下立柱被夾緊。SB2松開后,電動(dòng)機(jī)M4停轉(zhuǎn),整個(gè)“松開——移動(dòng)——夾緊”過程結(jié)束。由于主軸箱在搖臂上的夾緊與放松和立柱的夾緊與放松是用同一臺(tái)電動(dòng)機(jī)和液壓機(jī)構(gòu)配合進(jìn)行的,因此,在對(duì)立柱夾緊與放松的同時(shí),也對(duì)主軸箱在搖臂上進(jìn)行了夾緊與放松。
二、Z35型搖臂鉆床典型故障分析
(一)搖臂只能上升,不能下降(或只能下降,不能上升)
搖臂升降運(yùn)動(dòng)有一個(gè)方向能進(jìn)行,說明電動(dòng)機(jī)M3及其供電線路是好的,故障出在控制機(jī)正、反轉(zhuǎn)的接觸器KM2或KM3及有關(guān)電路中。檢修流程如下:
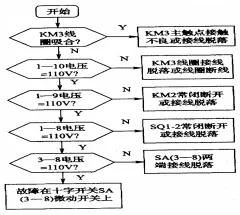
圖2 搖臂單向控制故障處理流程
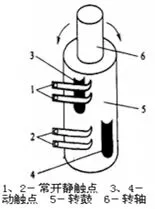
圖3 鼓形開關(guān)
(二)搖臂上升(下降)夾緊后,電動(dòng)機(jī)M 3仍正、反轉(zhuǎn)重復(fù)不停
故障的原因是鼓形組合開關(guān)SQ2的兩副常開觸點(diǎn)調(diào)節(jié)得太近,使它們不能及時(shí)分?jǐn)嘁鸬摹9男谓M合開關(guān)的結(jié)構(gòu)如圖3所示。
圖3中3和4是兩塊隨轉(zhuǎn)鼓5一起轉(zhuǎn)動(dòng)的動(dòng)觸點(diǎn),兩副常開靜觸點(diǎn)1、2分別對(duì)應(yīng)S02-1和SQ2-2。當(dāng)搖臂不做升降時(shí),要求兩副常開靜觸點(diǎn)1、2正好處于兩塊動(dòng)觸點(diǎn)3和4之間,使S02-1和SQ2-2都處于斷開狀態(tài)。如轉(zhuǎn)軸受外力作用,使轉(zhuǎn)鼓順時(shí)針方向轉(zhuǎn)過一個(gè)角度,則下面一對(duì)常開靜觸點(diǎn)S02-2接通;若轉(zhuǎn)鼓逆時(shí)針旋轉(zhuǎn)一個(gè)角度,則下面一對(duì)常開靜觸點(diǎn)S02-i接通。由于動(dòng)觸點(diǎn)3和4的位置決定了轉(zhuǎn)鼓旋轉(zhuǎn)至兩副常開靜觸點(diǎn)接通的角度,所以,鼓形組合開關(guān)SQ2是搖臂升降與松緊的關(guān)鍵。如果動(dòng)觸點(diǎn)3和4調(diào)整得太近,當(dāng)搖臂上升到預(yù)定位置,將十字開關(guān)手柄扳回中間位置時(shí),接觸器KM2斷電釋放。由于SQ2-2在搖臂松開時(shí)已接通,故接觸器KM3得電,電動(dòng)機(jī)M3反轉(zhuǎn),通過夾緊機(jī)構(gòu)使耀蓉孌緊。同時(shí),搖臂夾緊機(jī)構(gòu)帶動(dòng)轉(zhuǎn)軸6逆時(shí)針旋轉(zhuǎn)一個(gè)角度,使SQ2-2離開動(dòng)觸點(diǎn)4處于分?jǐn)酄顟B(tài),KM3斷電,電動(dòng)機(jī)M3斷電。由于慣性,電動(dòng)機(jī)及機(jī)械部分仍繼續(xù)轉(zhuǎn)過一段距離。此時(shí),因動(dòng)觸點(diǎn)3和4調(diào)整得很近,使鼓形組合開關(guān)轉(zhuǎn)過中間切斷位置,動(dòng)觸點(diǎn)3又將SQ2-1接通,接觸器KM2再次得電動(dòng)作,電動(dòng)機(jī)M3又正轉(zhuǎn)起來;如此不斷循環(huán),造成電動(dòng)機(jī)M3正、反轉(zhuǎn)擺動(dòng)運(yùn)轉(zhuǎn),使搖臂關(guān)緊和放松動(dòng)作反復(fù)不停。
(三)搖臂升降后不能充分夾緊
故障應(yīng)在鼓形組合開關(guān)SQ2上,引起此故障的原因有三個(gè):
1.鼓形開關(guān)動(dòng)觸點(diǎn)的夾緊螺栓松動(dòng),造成動(dòng)觸點(diǎn)3或4的位置偏移。正常情況下,當(dāng)搖臂放松,SQ2-2接通,上升到位將十字開關(guān)手柄扳到中間位置時(shí),接觸器KM3得電動(dòng)作,搖臂自動(dòng)夾緊。如果動(dòng)觸點(diǎn)4位置偏移,使SQ2-2未按要求閉合,則KM3不能得電,電動(dòng)機(jī)M3也就不能反轉(zhuǎn)進(jìn)行夾緊,使搖臂仍處于放松狀態(tài)。
2.鼓形組合開關(guān)的動(dòng)、靜觸點(diǎn)彎扭、磨損、接觸不良或兩副常開靜觸點(diǎn)過早分?jǐn)嘁部墒箵u臂不能充分夾緊。
3.在檢修安裝時(shí),沒有注意鼓形開關(guān)的兩副常開觸點(diǎn)的原始位置與夾緊裝置的協(xié)調(diào)配合,起不到夾緊作用。例如,安裝與鼓形組合開關(guān)相連的齒輪時(shí),如果與前面扇形齒條的嚙合偏移,就會(huì)使得搖臂夾緊機(jī)構(gòu)在沒有到達(dá)夾緊位置(或超過夾緊位置)時(shí)便停止運(yùn)動(dòng)。
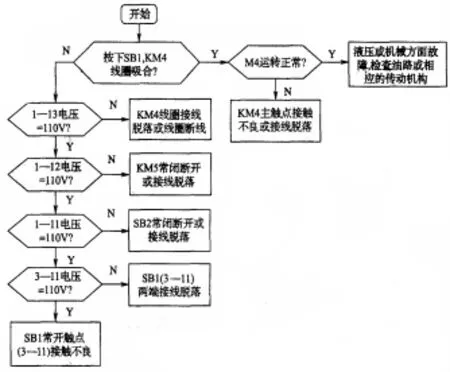
4.立柱只能放松不能夾緊(或只能夾緊不能放松)。
立柱的放松、夾緊是通過電動(dòng)機(jī)M4正、反轉(zhuǎn),驅(qū)動(dòng)齒輪式油泵,送出高壓油,經(jīng)一定的油路系統(tǒng)和傳動(dòng)機(jī)構(gòu)來實(shí)現(xiàn)的。立柱只能放松,不能夾緊,電氣、液壓、機(jī)械幾方面的故障都可能發(fā)生。檢修流程如圖4所示:
總之,電氣控制電路的故障查找是一項(xiàng)技術(shù)性較強(qiáng)的工作,也是實(shí)際工作中一項(xiàng)十分重要和繁鎖的工作,具體的故障查找方法也互不相同,控制系統(tǒng)出了故障,一時(shí)難以弄清是什么地方出了問題,就需要進(jìn)行故障的查找,而故障點(diǎn)的查找又有一定規(guī)律,用流程圖法可以縮短電氣控制線路故障查找的時(shí)間。
(編輯 李艷華)
(作者單位:廣東省技師學(xué)院)
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(hào)(2016年4期)2016-06-01 12:10:19
電測(cè)與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:32:52
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年7期)2015-04-17 02:12:40
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
