基于ZigBee的定位系統環境參數的探討
2011-11-20 07:40:20付軍安
長江大學學報(自科版) 2011年10期
付軍安
(成都理工大學信息科學與技術學院,四川 成都 610059)
盧涵宇
(成都理工大學信息科學與技術學院,四川 成都 610059 貴州大學計算機與信息工程系,貴州 貴陽 550003)
王合闖,王華軍
(成都理工大學信息科學與技術學院,四川 成都 610059)
基于ZigBee的定位系統環境參數的探討
付軍安
(成都理工大學信息科學與技術學院,四川 成都 610059)
盧涵宇
(成都理工大學信息科學與技術學院,四川 成都 610059 貴州大學計算機與信息工程系,貴州 貴陽 550003)
王合闖,王華軍
(成都理工大學信息科學與技術學院,四川 成都 610059)
為了解定位系統環境參數對定位精度的影響,對定位原理進行了研究,具體分析了室內定位系統的A、N值。測試試驗表明,當A值取39、N值取27時,室內定位系統的定位精度在1~2m之內,定位效果比較理想。
ZigBee;CC2431;定位系統; RSSI
ZigBee無線通信技術具有定位精度高、成本較低等特點,以該技術為基礎發展起來的各種定位系統具有良好的發展前景。通過對室內定位通信技術的研究發現,該技術應用于小型的室內環境定位效果良好,定位精度相對較高,相關的研究方法和結論可以為開發大型的定位系統如地下礦井人員定位系統提供決策性依據[1-4]。目前,很多定位系統的設計都是基于算法的改進和硬件的更新,忽視了具體環境的影響。為此,筆者對基于ZigBee的定位系統環境參數進行了探討。
1 ZigBee無線通信技術
ZigBee技術是一種新興的短距離、低速率無線網絡技術[5]。ZigBee工作在國際免授權的2.4GHz頻段上,具有250kbps 的最高數據傳輸率。在ZigBee網絡中存在3種邏輯設備類型,即協調器、路由器和終端設備。ZigBee網絡由一個協調器以及多個路由器和終端設備組成。
1.1ZigBee協議棧
ZigBee協議棧的基礎是IEEE 802.15.4,IEEE 802.15.4是IEEE無線個人區域網工作組的一項標準,但其僅能處理低級物理層(PHY)和媒體訪問控制層(MAC)。因此,Zigbee聯盟擴展了IEEE,對其網絡層(NWK)和應用層(API)進行了標準化。
1.2ZigBee的特點
ZigBee的特點具體表現在如下幾方面:①研發成本低。通過大幅簡化協議降低了對通信控制器的要求。②功耗低。低耗電待機模式下非常節電。③容量高。采用星狀、網狀等網絡結構,對網絡節點進行層層管理。④通信時延短。時延都在15~30ms之間。⑤可靠性高。3級安全模式確定其安全屬性。
2 室內定位系統環境參數的研究
2.1定位原理
CC2431是一個ZigBee片上系統,其滿足以ZigBee為基礎的2.4GHz(該頻段免費) ISM(Industrial Scientific Medical,工業科學醫學)頻段應用及對低成本、低功耗的要求。在常用的定位算法中,定位節點(終端設備)選用CC2431,參考節點(路由器)和網關(協調器)都選用CC2430,CC2430和CC2431內部邏輯結構相似,CC2430只比CC2431少一個定位引擎[1]。

圖1 節點在上位機中的分布
Signal Strength Indicator簡稱RSSI),RSSI的值隨著距離的增加而減小。在CC2431組成的無線定位網絡中,包括參考節點、定位節點以及網關3部分。網關的作用相當于ZigBee的協調器,負責整個定位無線網絡服務、協調。參考節點是一個安置在已知位置的動態結點,其物理位置是固定不變的。定位節點是一個由CC2431構成的結點,其位置可以隨時變化,具體位置由CC2431的定位引擎通過接受參考節點的RSSI值經過定位算法計算而得到。在CC2431定位引擎定位操作過程中,定位節點會首先讀取距離自己最近的8個參考節點的坐標(X、Y)值,然后再讀取其他標準參數,即A值和N值。A值為離發射節點(CC2430/CC2431)1m遠的RSSI絕對值,N值為離發射節點每增加1m衰減的RSSI絕對值,A、N值會隨環境的變化而變化。將得到的定位節點位置坐標(X,Y)值發送給網關傳到后臺的上位機實時監控軟件上,利用上位機軟件對位置進行實時監控。節點在上位機中的分布如圖1所示,其中深色點為參考節點,淺色點為定位節點。
2.2室內定位系統A、N值分析
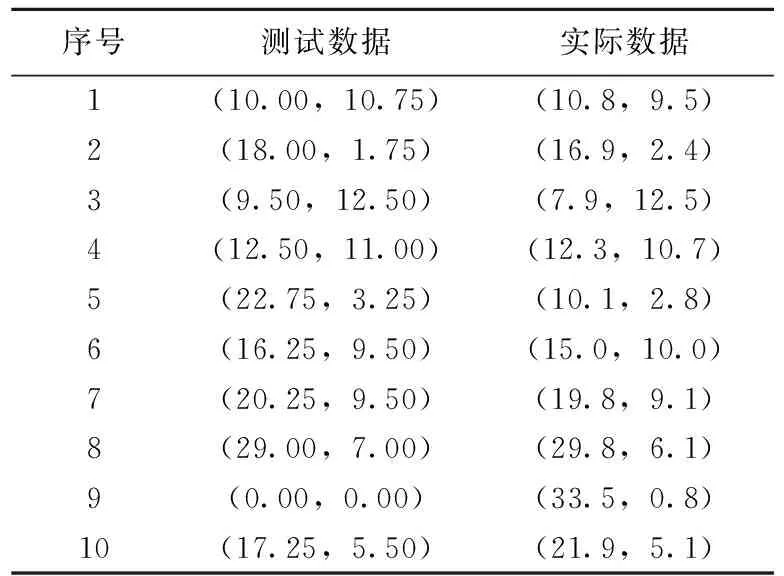
表1 相關試驗數據
測試試驗的運行環境為IAR Embedded WorkBench(EW8051)集成開發環境 7.20H版本,包含Z-Stack v1.4.2協議棧、SmartRF Flash Programmer工具軟件和Genneral Packet Sniffer 協議分析軟件。首先選用TI公司的2Z-Location_Engine 上位機定位軟件,在測試區域為64m×64m的操作區,選取5個參考節點和1個定位節點,根據需要調整參考節點擺放的位置,而擺放的位置發生變化時相應的坐標也應隨之改變。改變A、N的值,定位精度會有所不同,經過反復嘗試,得出A值取39、N值取27時,精度較高。試驗相關數據如表1所示。
從表1可以看出,第5組和第9組數據中測試數據和實際數據的X值相差過大,參考性不大。第4、7、8組測試數據和實際數據的X值和Y值偏差都在1m之內,效果比較理想。第2、3、6組的精度也比較高,其X值偏差都在1.6m以內,Y值偏差也都在1m之內。另外,第1組測試數據和實際數據的X值偏差在1m以內,Y值偏差超過了1m,而第10組測試數據和實際數據的Y值偏差在1m之內,X值偏差超過了3m,但對整體數據沒有太大的影響,仍可認為是有效數據。因此,當A值取39、N值取27時,室內定位系統的定位精度在1~2m之內,定位效果比較理想。
為了更好的探討相關的定位環境,筆者編寫了一個上位機軟件,該軟件的界面環境為模擬地下礦井。當把參考節點的實際位置坐標事先設定在地下礦井中的某個礦道兩側時,得出的定位節點位置坐標會顯示出來。通過模擬發現,當A值取39、N值取27時, CC2431定位節點朝某個方向直線移動時,監控界面中的“礦工”在礦井通道里比較平穩的移動,路線并沒有出現太大的跳躍和波折(見圖2),從而進一步說明在室內環境下,通過測試試驗確定的A、N值是合理的。
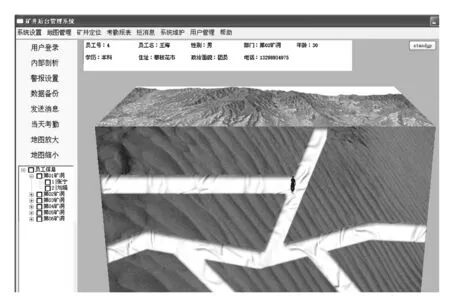
圖2 上位機監控界面
3 結 語
應用ZigBee技術可實現室內定位,以該技術為基礎的定位系統對環境的依賴性比較強,要提高定位精度,在總體設計時應考慮環境因素的影響。通過測試試驗,具體分析了室內定位系統的環境參數A、N值。結果表明,當A值取39、N值取27時,室內定位系統的定位精度在1~2m之內,定位效果比較理想。另外,地下停車場和大型礦井井下人員的定位等可以該系統為參考,通過對環境參數進行適當調整,也可以獲得更好的定位精度。
[1]耿曉立,邱選兵,魏計林.基于ZigBee技術的井下人員定位系統的研究[J].太原科技,2008(1):52-55.
[2]莊昆,孫喆.基于RFID 技術煤礦井下人員定位系統研究[J].山東煤炭科技,2009(4):87-89.
[3]李偉, 崔建明.基于ZigBee和GIS 的井下人員定位系統的設計[J].工礦自動化,2010(2):67-69.
[4]龔江濤,陳金鷹,方根平.Zigbee技術特點及其應用[J].物探化探計算技術,2007,5:382-385.
[5]趙妍,岳炳良,高大偉.Zigbee 無線解決方案網絡層研究[J].計算機測量與控制,2007,15 (5):689-691.
[6]陳真,汪小燕,王鈺.智能網絡關愛系統的設計與實現[J].微電子學與計算機,2010,27(9):144-146.
[7]劉洋,楊潔明.基于CC2431 的井下人員定位方法研究[J].煤礦機械,2010,31(6):49-51.
[8]鐘新躍,謝完成.無線傳感器網絡在煤礦環境監測中的應用設計[J].煤炭技術,2009,28(9):102-103.
[9]王春,華鋼,朱艾春,等.煤礦井下人員定位系統上位機軟件的設計與實現[J].煤礦安全,2010(8):64-66.
[編輯] 李啟棟
10.3969/j.issn.1673-1409.2011.04.028
TP391
A
1673-1409(2011)04-0086-03