礦井提升機超同步串級調速控制研究
2011-12-08 12:21:09張曉鳳張鵬惠
黑龍江工業學院學報(綜合版) 2011年4期
關鍵詞:系統
張曉鳳 張鵬惠
礦井提升機超同步串級調速控制研究
張曉鳳 張鵬惠
針對晶閘管串級調速控制系統存在的問題,提出了采用定子磁場定向的矢量控制技術的雙PWM整流器的雙饋串級調速方案,確定了整流器調制度,詳細分析了系統運行過程。
礦井提升機;PWM整流器;矢量控制;串級調速
一 引言
隨著電力電子技術和控制技術的發展,為繞線式異步電動機的調速控制提供了較大的發展空間,采用串級或雙饋調速方式,在調速時可將轉差功率回收利用,或者變為機械功率回饋到電機軸上,或者回饋電網,調速系統的效率較高。
與高壓交流調速的定子控制對比,具有以下優點:一是高壓調速,低壓控制,經濟、可靠;二是調速控制裝置功率小于電動機功率,可以在調速范圍內滿足需求的前提下,減小控制裝置的容量;三是調速控制與機械輸出成并聯關系,故障時可以短接轉子繞組,旁路控制裝置,使異步電動機運行于自然特性,提高系統運行可靠性。繞線式異步電動機的晶閘管串級調速系統,在調速范圍要求不高的情況下,晶閘管裝置的容量與電動機轉差功率相當,調速裝置的容量可大大減小,特別是轉子電壓為低壓,整個調速系統的成本比變頻調速方案低很多。但由于調速系統功率因數低、調速范圍小及諧波抑制等問題,使其推廣應用受到限制。
針對繞線異步電機的傳統串級調速控制存在的問題,本文提出基于電壓型雙PWM整流器的串級調速方案,采用定子磁場定向的矢量控制技術。
二 系統控制原理
1.結構與工作原理。
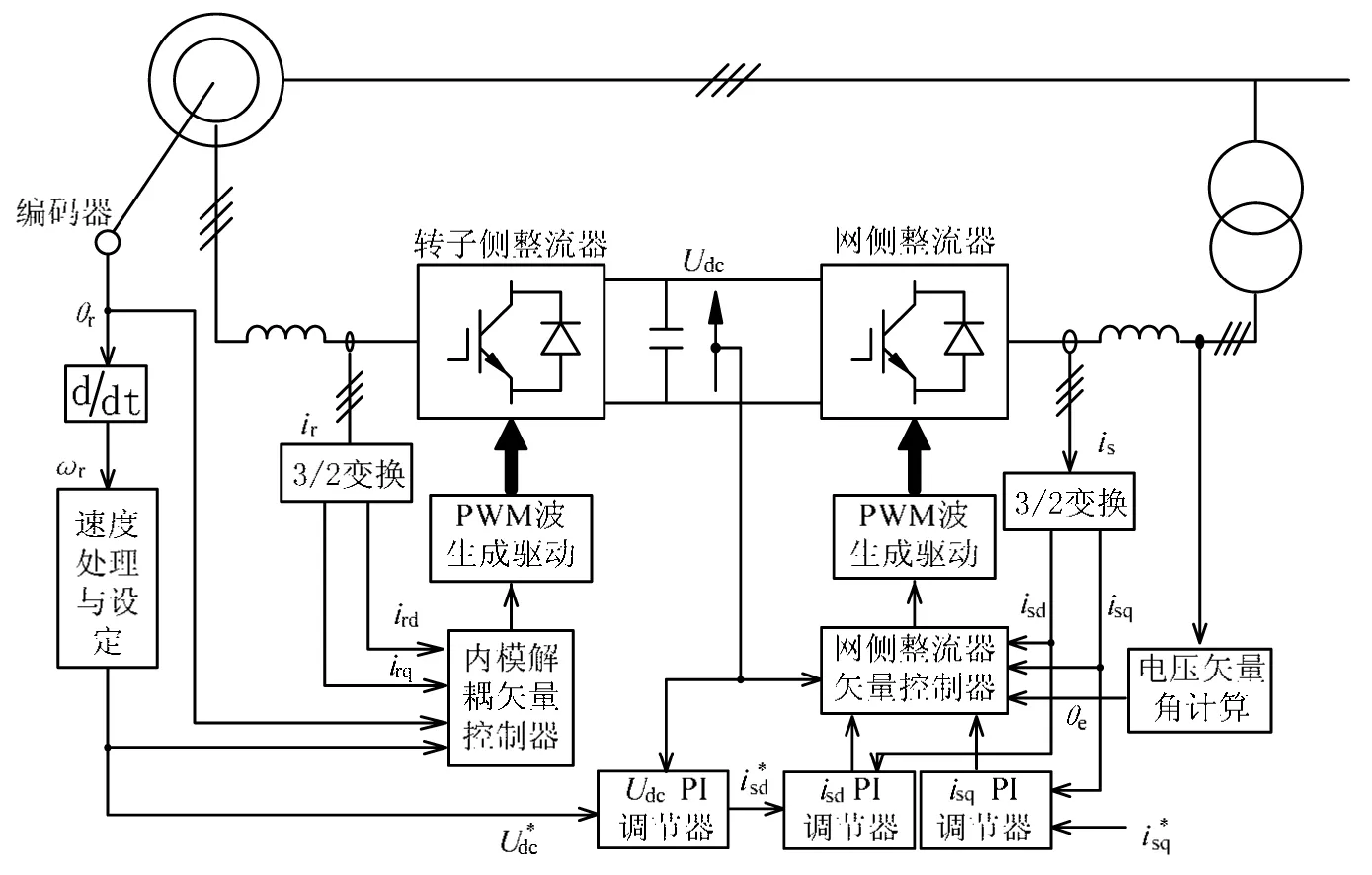
圖1 系統實驗結構框圖
圖1所示系統實驗結構框圖,功率部分由轉子側和網側PWM整流器組成,相應的控制部分,采用直流雙閉環方式的定子磁場定向矢量控制。系統控制器除完成相應的控制算法、磁鏈觀測器和驅動PWM脈沖波的形成與分配外,還設置速度差和電流的電平檢測器及邏輯狀態判別器,以控制電機在起動、加速、等速、減速和爬行各階段雙PWM整流器相應的工作狀態。
2.整流器控制。PWM整流器作為一種新型整流器,可以克服晶閘管整流器輸入電流諧波含量高、功率因數低、換相重疊嚴重等缺點,它結合PWM逆變控制技術,不僅可獲得可控的AC/DC變換性能,而且可實現交流輸入側單位功率因數和正弦波電流控制。PWM整流器對輸出電壓和輸出電流具有較強的控制能力,具有較高的功率密度和雙向傳遞電能的能力,能實現輸出電壓的快速調節,以保證系統有良好的動態性能。
PWM整流器的主要作用,是在轉子功率變化過程中,保持直流側電壓的相對穩定。網側整流器系統參數和模型參數相對來說是比較穩定的,采用電動機定子電壓(或電源電壓)定向的矢量控制技術,可實現網側整流器與電網之間的有功功率和無功功率傳遞的獨立控制。PWM整流器電網電壓定向矢量控制,可按直流系統的控制方式,采用電流內環和電壓外環的級聯雙閉環控制方式。其中,電壓環主要作用是控制直流側電壓,電流環則根據電壓環輸出的電流給定值控制交流輸入電流。
3.整流器調制度確定。PWM整流器的控制技術主要體現在“間接電流控制”和“直接電流控制”兩大方向上。直接電流控制策略以快速的電流響應和魯棒性倍受關注,并針對固定輸入已研究出各種不同的控制方案。當輸入電源按一定規律發生變化時,電路參數的變化等因素直接影響控制方案的實施。本文通過改進的PWM整流器相位幅值控制方式,針對PWM整流器輸入電流的動態響應慢、對系統參數變化靈敏等問題,分析研究了整流器輸入前端電壓滯后角δ與PWM整流器調制度m之間的關系。
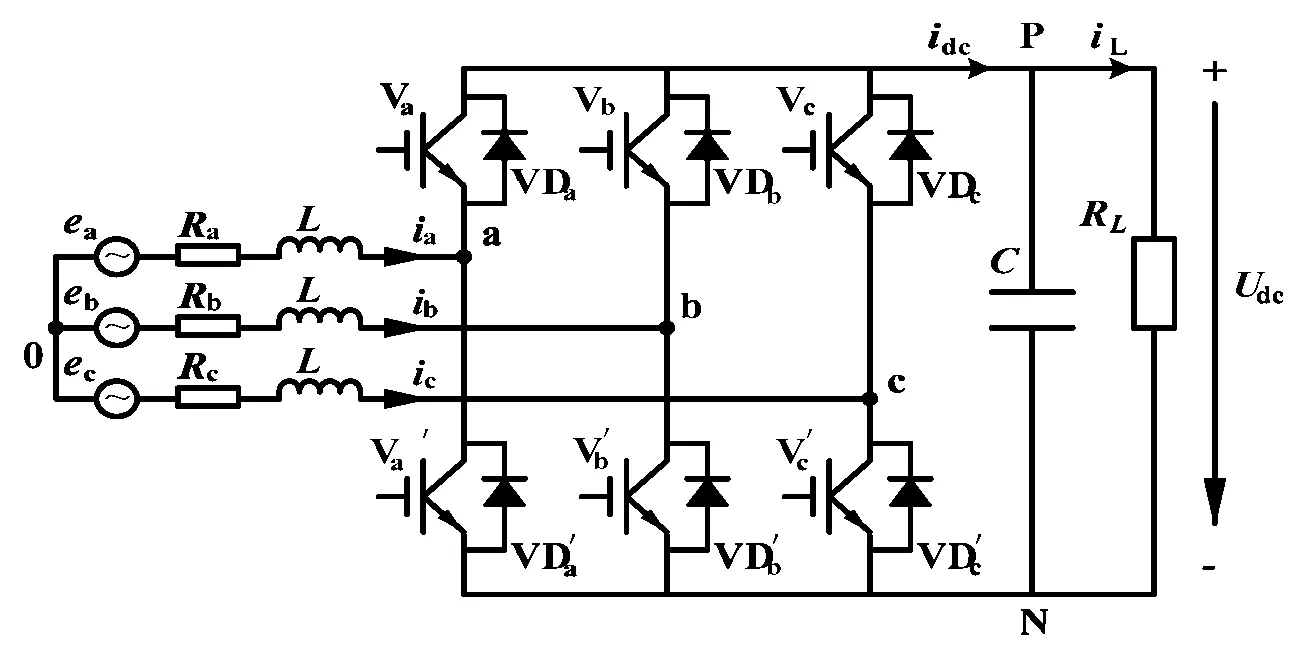
圖2 三相電壓型PWM整流器結構拓樸
圖2所示電路為三相電壓型PWM整流器拓樸結構,當調制度為m時,PWM整流器前端輸入電壓基波分量ura為

式中,Ura為整流器前端輸入電壓基波分量峰值。
因此,

通過調整PWM的調制度m和控制角δ,控制電感L上電壓的相位,可以使輸入電流基波分量的相位與輸入電壓相位相同或相反。
為避免過度調制,通常網側整流器PWM調制度m1取為0.75,而轉子側整流器PWM調制度m2最大可取0.76,因此在理論上,6極繞線式異步電動機的調速范圍可達0~2000r/min。
三 系統運行控制過程
礦井提升機運行狀態有提升和下放兩種,負荷包括人員、材料和矸石的提升和下放,綜合各種情況,電動機運行基本可分為四個狀態:亞同步電動運行,超同步再生制動運行,超同步電動運行和亞同步再生制動運行。
以矸石提升循環為例分析PWM整流器的工作狀態。
速度給定環節按圖3方式給出提升機運行速度圖:
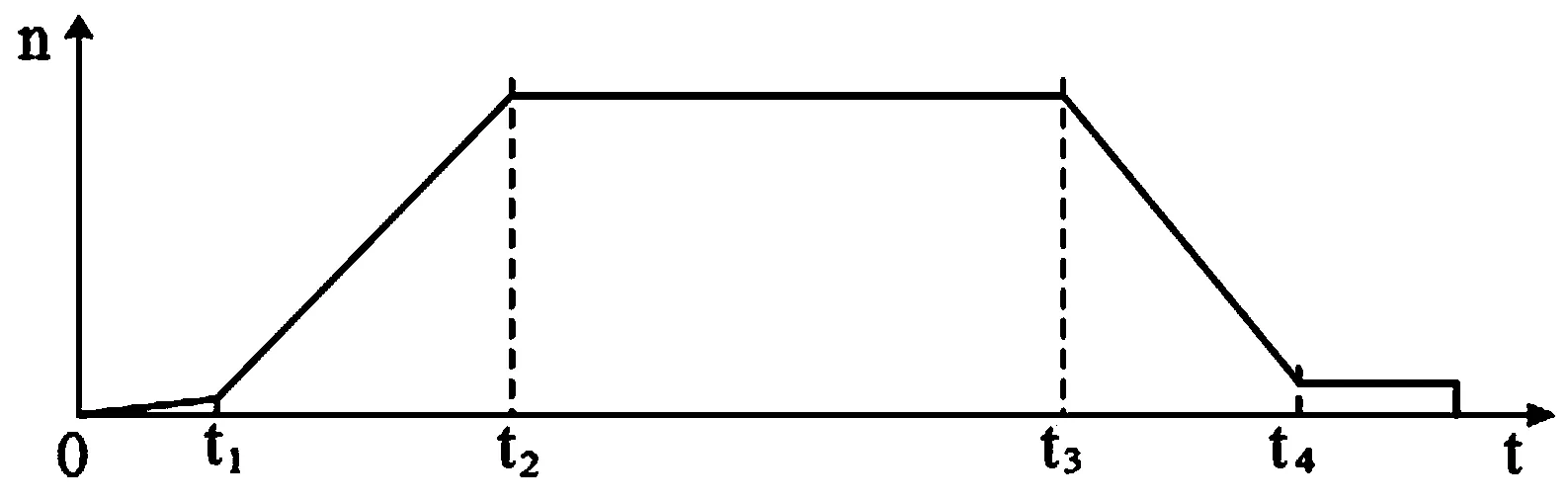
圖3 提升機運行速度圖
1.起動。為實現全范圍調速,本系統采用直接起動,利用PWM整流器控制裝置本身來直接起動電動機,而不用任何附加起動設備。起動控制時,網側整流器先于電動機接通交流電網,然后接通電動機定子電源,此時轉子呈開路狀態,可防止因電動機起動時的合閘過電壓通過轉子回路損壞整流裝置,最后將轉子繞組與轉子側整流器接通。當轉子回路接通時,由于轉子整流電小于逆變電壓,直流回路無電流,電動機尚不能起動,通過網側PWM整流器交流輸入電壓的幅值和相位控制逐漸降低逆變電壓,直流回路產生電流,電動機平穩加速,直至達到給定轉速。
2.加速段運行。
(1)正力加速。加速開始,網側整流器逆變作用與轉子側整流器整流作用相當,加強轉子側整流器整流作用,電動機從0加速。加速時,轉子側整流器工作在整流狀態,網側整流器工作在逆變狀態,電動機轉子轉差功率由轉子經轉子側整流器、網側整流器、逆變變壓器回饋電網。
(2)負力加速。負力加速過程,速度反饋值始終超前速度給定值,速度調節器在負偏差的作用下進行調節,轉子側整流器工作在逆變狀態,網側整流器工作在整流狀態,轉子轉差功率由變壓器經網側整流器、轉子側整流器、定子回饋電網。
在初加速和主加速階段,電動機工作于亞同步電動運行狀態,實際速度小于給定速度,速度差gt;0,轉子側整流器工作在整流狀態,網側整流器工作在逆變狀態。輸入到電動機定子側的電磁功率,一部分變為機械功率由電動機軸輸出,另一部分變為轉差功率,由整流器饋入電網。加速至同步速附近(同步速的95%左右——通過實驗確定)時,切換整流器的工作狀態,轉子側整流器工作在逆變狀態,網側整流器工作在整流狀態,定子側和整流器同時向電動機軸輸入功率,電動機繼續加速至同步轉速或超同步運行。當電動機超同步運行時,Slt;0,轉子側整流器又工作在逆變狀態,而網側整流器工作在整流狀態。
3.等速段運行。正力提升等速運行段,若轉子電流小于轉子額定電流的15%~20%或由于負載變化出現負力時,需重新投入串級調速裝置,使系統在亞同步發電制動狀態下運行,防止電機在自然特性上過渡到超同步發電制動狀態運行,造成提升機在過減速點無法正常減速的后果,保證系統的安全運行。
負力運行等速段,串級調速裝置參與全過程的調速控制。
4.減速段運行。區別于傳統的晶閘管控制的串級調速系統,本系統可通過串級調速裝置實現對提升機減速段的運行控制。
(1)正力提升等速運行減速控制。過減速點時投入串級調速裝置,電動機由自然特性過渡到串級調速方式運行,由函數發生器給出減速圖及爬行速度。轉子側整流器工作在整流狀態,網側整流器工作在逆變狀態,轉子電流減小,負載轉矩大于電動機拖動轉矩,提升機減速。轉子電勢隨電機轉速下降而增加,當電動機減速至速度反饋信號小于爬行給定速度信號時,在控制單元的作用下,使轉子電流回升。當電動機速度反饋信號與爬行給定速度信號平衡時,減速控制結束,系統進入穩定爬行段。
(2)負力下放等速運行減速控制。同上,過減速點時由函數發生器給出減速圖及爬行速度。轉子側整流器工作在逆變狀態,網側整流器工作在整流狀態,直流回路電流增大,電動機拖動轉矩小于負載轉矩,提升機減速。在控制單元的作用下,當電動機速度反饋信號與爬行給定速度信號平衡時,減速控制結束,系統進入穩定爬行段。
在減速階段,過減速點后,速度給定降至爬行速度,速度差lt;0。超同步轉速下,由于Slt;0,轉子側整流器工作在整流狀態,網側整流器工作在逆變狀態;減速至同步速以下,由于Sgt;0,轉子側整流器工作狀態切換為逆變,網側整流器工作在整流狀態。減速至爬行速度時,由于慣性作用,速度差gt;0,轉子側整流器恢復整流狀態,網側整流器工作在逆變狀態,電動機又進入電動運行狀態。
四 結論
采用雙PWM整流器構成的繞線式異步電機雙饋串級調速系統,能夠解決晶閘管串級調速控制存在的系統功率因數低、諧波污染等問題,可使調速系統調速在亞同步速、同步速及超同步轉速寬范圍內的平滑過度。定子磁場定向的矢量控制技術的應用,可解決因模型不精確及參數變化對系統調速性能的影響,提高對PWM整流器的可控性與控制精度,有進一步深入研究和推廣應用價值。
[1]屈維謙.串級調速的再討論[J].電氣傳動自動化,2007,29(3):1~6.
[2]李華德.交流調速控制系統[M].北京:電子工業出版社,2003.
[3] 戴暉,沈錦飛.基于定子磁鏈的雙饋電機矢量控制系統的研究[J].電工電氣,2010(8):5~8.
[4]張崇巍,張興.PWM整流器及其控制[M].北京:機械工業出版社,2005.
ClassNo.:TD534DocumentMark:A
(責任編輯:蔡雪嵐)
ResearchonSuper-synchronousCascadeControlofMineElevator
Zhang Xiaofeng Zhang Penghui
Considering the Static Kramer drive system and Static Scherbius drive system, the paper proposed the scheme of doubly fed cascade control system with double-side PWM rectifier which adopted vector control technology.The paper also introduced the running process of and the modulating relation.
mine hoist;PWM rectifier;vector control;cascade control
張曉鳳,助理工程師,新汶礦業集團華豐煤礦,山東·泰安。研究方向:機電。郵政編碼:271413
張鵬惠,助理工程師,雞西礦業集團公司杏花煤礦選煤廠,黑龍江·雞西。郵政編碼:158173
1672-6758(2011)04-0061-2
TD534
A
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
