一種智能交通系統(tǒng)的自適應(yīng)擁塞控制方法
2012-01-15 06:02:52楊偉鈞
電子設(shè)計(jì)工程 2012年15期
關(guān)鍵詞:模型
楊 燕,楊偉鈞
(廣州城市職業(yè)學(xué)院 廣東 廣州 510405)
隨著經(jīng)濟(jì)的發(fā)展,交通需求和交通量成為城市交通網(wǎng)絡(luò)中急需解決的問題,智能交通系統(tǒng)為改善和提高交通發(fā)揮了重要的作用,其中,交通信號(hào)控制是智能交通系統(tǒng)的一個(gè)重要方面,平面交叉口的控制是智能交通流量控制的基礎(chǔ)。交通信號(hào)控制系統(tǒng)具有較強(qiáng)的非線性、模糊性和不確定性,用傳統(tǒng)的控制理論和方法很難對(duì)其進(jìn)行有效的控制,如傳統(tǒng)的定時(shí)控制和感應(yīng)控制具有很明顯的缺點(diǎn)。把先進(jìn)技術(shù)應(yīng)用與交通路口的信號(hào)控制是一個(gè)新的研究方向。1977年希臘的C.P.Pappis和英國(guó)的E.H.Mamdani提出了單交叉口模糊控制法(稱Pappis法)[1],分析考慮單交叉路口的理想狀態(tài)下的控制;1992年我國(guó)徐東玲等學(xué)者也提出了基于感應(yīng)控制思想的單路口模糊神經(jīng)網(wǎng)絡(luò)控制方案,效果較好。
目前很多路口都是多相位的,因此多相位平面交叉口的研究很有必要。筆者針對(duì)車流量擁塞控制問題提了一種模糊模型參考學(xué)習(xí)控制策略。交通路口車流量的高突發(fā)性和時(shí)變特征對(duì)智能交通系統(tǒng)自適應(yīng)性能[2]提了更高的要求。筆者提出的控制策略,主控制通道采用模糊控制方法,綜合考慮多相位平面交叉口當(dāng)前到達(dá)車輛的排隊(duì)長(zhǎng)度和后繼兩相位車輛的排隊(duì)長(zhǎng)度,對(duì)相位實(shí)施不同的配時(shí)方案,保證系統(tǒng)的穩(wěn)定性和魯棒性;輔助學(xué)習(xí)通道采用模糊模型參考自適應(yīng)方法實(shí)現(xiàn)主通道控制參數(shù)的自修正和自學(xué)習(xí)過程,針對(duì)車流量突發(fā)性狀況自適應(yīng)調(diào)整主控制通道的配時(shí)參數(shù),對(duì)相位實(shí)施不同的配時(shí)方案,提高多相位路口的通行能力,緩解交通壓力。
1 車流量擁塞控制模型
根據(jù)智能交通系統(tǒng)中多相位路口車流量主動(dòng)隊(duì)列管理的作用機(jī)制,可以得到擁塞控制的流體動(dòng)力學(xué)模型如下所示[3]:

其中,V (t)為車流量窗口大小;F(t)為車流傳播時(shí)間RTT;d(t)為車流緩沖區(qū)隊(duì)列長(zhǎng)度;M(t)為車流鏈路容量;Ty 為傳輸時(shí)間;K(t)為交通路口活動(dòng)相位連接數(shù);y(t)為主動(dòng)丟棄概率。定義(V,d)為流體模型的狀態(tài)變量,y為輸入變量。令V′=0 和 d′=0 時(shí), 得到網(wǎng)絡(luò)流體動(dòng)態(tài)系統(tǒng)的平衡點(diǎn)(V0,d0,y0)。進(jìn)一步在平衡點(diǎn)附近線性化,則可得到在近似時(shí)滯二階動(dòng)態(tài)的傳遞函數(shù)為

2 主通道模糊控制系統(tǒng)設(shè)計(jì)
本文模糊模型參考學(xué)習(xí)控制器引入了參考模型的學(xué)習(xí)機(jī)制對(duì)模糊控制的知識(shí)庫(kù)進(jìn)行修正。由于高速網(wǎng)絡(luò)中分組丟棄機(jī)制需要較強(qiáng)的實(shí)時(shí)性,因此本文提出的控制方法采用了模糊反向推理機(jī)制對(duì)主控制器的參數(shù)進(jìn)行修正,以滿足系統(tǒng)的實(shí)時(shí)性要求。擁塞控制系統(tǒng)輸入為平均隊(duì)列長(zhǎng)度與期望隊(duì)列長(zhǎng)度的偏差以及偏差的變化率,系統(tǒng)輸出為所計(jì)算的丟棄概率。主通道模糊控制器是一個(gè)雙輸入單輸出結(jié)構(gòu)的控制器,輸入變量為A,B(隊(duì)列偏差、偏差變化率),輸出變量為C(控制量丟棄概率)。控制規(guī)則表示為

其中Ai,Bj,Ck分別表示語言詞集。主通道模糊控制器的輸入為E和EC,輸出為U,設(shè)定E,EC和U的論域均為:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。 對(duì)應(yīng)的模糊語言子集為{NB(負(fù)大)、N(負(fù)中)、NS(負(fù)小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)}。 通過比例因子 ke和 kec將偏差e和ec轉(zhuǎn)換為模糊學(xué)習(xí)控制器的輸入論域E和EC,通過量化因子ku將控制器的輸出轉(zhuǎn)化為實(shí)際控制量。E=e×ke和EC=ec×kec,其中〈〉為取整運(yùn)算。在模糊模型參考學(xué)習(xí)控制器中,控制規(guī)則可以得到在線實(shí)時(shí)調(diào)整,每個(gè)輸出與輸入可以用一定的對(duì)應(yīng)關(guān)系來表示:

通過調(diào)整α,就可以根據(jù)不同交通網(wǎng)絡(luò)狀況、不同時(shí)刻的誤差和誤差變化率來調(diào)整控制規(guī)則[4]。當(dāng)平均隊(duì)列長(zhǎng)度與期望隊(duì)列長(zhǎng)度之間的偏差較大時(shí),或者當(dāng)網(wǎng)絡(luò)的業(yè)務(wù)量突發(fā)性能較強(qiáng)時(shí),誤差對(duì)輸出的影響應(yīng)超過誤差變化率的影響,α的值應(yīng)取得較大以獲取較好的穩(wěn)定性。反之,α的值可取得小些以提高系統(tǒng)控制精度。模糊模型參考學(xué)習(xí)控制就是利用參考模型的輸出與實(shí)際輸出的誤差及其變化率實(shí)時(shí)在線地調(diào)整α的值來達(dá)到調(diào)整控制規(guī)則的目的。為了使模糊模型參考學(xué)習(xí)控制器做到實(shí)時(shí)在線推理,對(duì)模糊模型參考學(xué)習(xí)控制器的推理過程進(jìn)行了改進(jìn)。
3 輔助通道模糊反向推理設(shè)計(jì)
本文仍然采用模糊推理方法來完成對(duì)α的調(diào)整,以保證修正過程的簡(jiǎn)單迅捷。α的調(diào)整過程是基于參考模型與實(shí)際對(duì)象的誤差及其變化率的模糊推理來實(shí)現(xiàn)的。具體實(shí)現(xiàn)如圖1所示。

圖1 反向推理學(xué)習(xí)結(jié)構(gòu)Fig.1 Study structure of backward inference
其中,E^,E^C,S 分別為 e^,e^c 和 α 的模糊量, 其論域均為{-6, -5,-4, -3, -2, -1, 0, 1, 2, 3, 4, 5, 6}。 E^,E^C 和S對(duì)應(yīng)的模糊詞集為{NB,NM,NS,ZO,PS,PM,PB}。根據(jù)在校正過程中要遇到的各種可能出現(xiàn)的情況和相應(yīng)的調(diào)整策略得到控制規(guī)則表如表1所示。

表1 α調(diào)整規(guī)則Tab.1 Rules of α adjustment
根據(jù)表1,用Max-Min方法進(jìn)行Fuzzy推理和逆模糊化[5],可得到模糊判決表。在系統(tǒng)運(yùn)行時(shí)的t時(shí)刻采樣周期內(nèi),根據(jù)E^,E^C由α調(diào)整規(guī)則模糊判決表可直接查出相應(yīng)的S,從而得出α的相應(yīng)調(diào)整值。

其中, kα 為量化因子,使得 α∈(0,1)。
4 控制算法實(shí)現(xiàn)步驟
對(duì)于整個(gè)模糊模型參考學(xué)習(xí)控制器來說,在t時(shí)刻采樣周期內(nèi),根據(jù)隊(duì)列長(zhǎng)度誤差和誤差變化率E^,E^C,可由模糊判決表查出相應(yīng)的S,進(jìn)一步得到相應(yīng)的α值,再由E,EC,α根據(jù)式(4)可得到規(guī)則自校正模糊控制器的輸出U,并由量化因子ku計(jì)算得到丟棄概率p。控制算法實(shí)現(xiàn)步驟如下[6]:
1)計(jì)算擁塞控制系統(tǒng)的輸入狀態(tài)。
2)根據(jù)參考模型的輸出與實(shí)際對(duì)象輸出計(jì)算e^,e^c。
3)根據(jù)參考模型誤差和誤差變化率 E^,E^C ,由式(5)計(jì)算相應(yīng)的α值。
4)計(jì)算規(guī)則自校正模糊控制器的輸出U。
5)由模糊控制的量化因子計(jì)算最終的丟棄概率p。
5 仿真研究
通過仿真試驗(yàn)來評(píng)估模糊參考模型網(wǎng)絡(luò)自適應(yīng)擁塞控制算法,交通流拓?fù)浣Y(jié)構(gòu)采用啞鈴型結(jié)構(gòu),鏈路容量為1 500個(gè)/s,隨機(jī)延時(shí)為[16 s,24 s]之間的平均分布,業(yè)務(wù)源采用了持續(xù)性業(yè)務(wù)流,交通路段的緩存為800個(gè),平均流量長(zhǎng)度為500個(gè)。仿真研究將本文提出的模糊模型參考控制方法與普通模糊控制進(jìn)行比較,研究了在突發(fā)性狀況下2種算法的控制性能和魯棒性能。
2種控制算法的仿真結(jié)果如圖2、圖3所示,注意到當(dāng)輸入源發(fā)生突發(fā)性增長(zhǎng)時(shí),普通模糊控制策略將使緩沖區(qū)隊(duì)列長(zhǎng)度嚴(yán)重脫離期望隊(duì)列長(zhǎng)度,而使用了模糊參考模型自適應(yīng)控制后,緩沖區(qū)隊(duì)列僅僅經(jīng)過一個(gè)短暫的突發(fā)脈沖就恢復(fù)到平衡點(diǎn)附近。從實(shí)驗(yàn)結(jié)果可以看出,由于普通模糊控制器的推理方式和規(guī)則知識(shí)固定,因此在交通道路車流發(fā)生突發(fā)變化時(shí)難以達(dá)到滿意的控制性能,而本文提出的車流自適應(yīng)擁塞控制方法能夠跟隨車流量狀況實(shí)時(shí)調(diào)整模糊控制參數(shù),進(jìn)而對(duì)突發(fā)性車流擁塞對(duì)象具備了良好的自適應(yīng)控制性能。
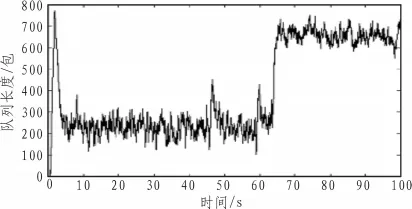
圖2 模糊控制的隊(duì)列長(zhǎng)度Fig.2 Length of queue by fuzzy control

圖3 模糊模型參考自使用控制的隊(duì)列長(zhǎng)度Fig.3 Length of queue by fuzzy reference model mechanism adaptive control
6 結(jié)束語
針對(duì)車流狀態(tài)的突變行為,本文提出了一種基于模糊參考模型機(jī)制的自適應(yīng)擁塞控制算法,以提高在多相位交叉路口的車流量控制的服務(wù)質(zhì)量。該方法采用雙通道信息回路對(duì)車流量緩沖區(qū)隊(duì)列長(zhǎng)度作自適應(yīng)調(diào)整與控制。自適應(yīng)模糊控制計(jì)算過程簡(jiǎn)單迅捷,該算法在自適應(yīng)性能和實(shí)時(shí)性能之間實(shí)現(xiàn)了較好的平衡。性能之間實(shí)現(xiàn)了較好的平衡。
[1]Pappis C P,Mamdani E H.A fuzzy logic controller for a traffic junction[J].IEEE Transactions on Systems,Man and Cybernetics,1977:707-717.
[2]楊偉鈞.一種高性能指紋鎖硬件平臺(tái)的設(shè)計(jì)[J].電子設(shè)計(jì)工程,2010,18(4):131-133.YANG Wei-jun.A design of the platform about the highperformance fingerprint locks Hardware[J].Electronic Design Engineering,2010,18(4):131-133.
[3]劉治,章云.基于模糊參考模型機(jī)制的網(wǎng)絡(luò)自適應(yīng)擁塞控制[J].計(jì)算機(jī)工程,2008,7(4):89-91.LIU Zhi,ZHANG Yun.Network adaptive congestion control based on fuzzy reference model mechanism [J].Computer Engineering, 2008,7(4):89-91.
[4]牛強(qiáng),劉學(xué)平,向東,等.基于模糊控制的自動(dòng)進(jìn)料微控制器設(shè)計(jì)與實(shí)現(xiàn)[J].儀表技術(shù)與傳感器,2008,45(11):93-95.NIU Qiang,LIU Xue-ping,XIANG Dong,et al.Design and implementation of automatic loading microcontroller with fuzzy control[J].Instrument Technique and Sensor,2008,45(11):93-95.
[5]Paganini F,WANG Zhi-kui.Doyle J C, et al.Congestion Control for High Performance,Stability and Fairness in General Networks[J].IEEE/ACM Trans.on Networking,2005,13(1):43-56.
[6]楊海馬,劉瑾,吳文婕.基于模糊控制的恒壓供水智能監(jiān)控系統(tǒng)的研究[J].儀器儀表學(xué)報(bào),2006,27(6):1870-1871.YANG Hai-ma,LIU Jin,WU Wen-jie.Study on the intelligent detecting system for water supply of constant pressure based on the fuzzy control[J].Chinese Journal of Scientific Instrument,2006,27(6):1870-1871.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
