圓光柵測角系統信號細分電路設計
2012-01-15 06:02:56馬曉梅郭華鵬
電子設計工程 2012年15期
于 耕,馬曉梅,郭華鵬
(沈陽航空航天大學 電子信息工程學院,遼寧 沈陽 110136)
圓光柵測角系統是一種精密的測角系統,主要應用在雷達、航空、自動化儀表、精密儀器、機器人等領域,具有體積小、測量范圍大、精度高等特點。圓光柵碼盤是現代精密圓光柵測角系統中,廣泛使用的一種角度傳感器,它是以光柵相對位移所形成的莫爾條紋信號為基礎,由于光柵的相對移動,使透射光的光強度呈周期性變化,這種光強信號經光電變換形成周期性變化的電信號(正余弦波信號),對此信號進行相應處理后,即可獲得光柵的相對移動量。在測量精度不高的情況下,只需對此信號變化的周期進行計數,即可求得光柵的相對移動量。但是,隨著科學技術的發展,僅對此信號的周期進行計數無法滿足航空航天、機器人控制等領域精確測量的需要。當前工程上希望在盡可能小的誤差范圍內精確地實現對圓光柵測角系統信號進行高倍數字化細分。文中正是基于此目的設計了含有大方位、大俯仰、小方位、小俯仰4個軸系的角度位置的圓光柵角度測量系統,同時闡述了圓光柵測量原理,設計了圓光柵測角信號移相電阻鏈細分電路,將測得的原始的光柵正余弦信號施加在電阻鏈兩端,在電阻鏈的接點上得到幅值和相位各不相同的電信號。這些信號經整形、脈沖形成后,就能在正余弦信號的一個周期內獲得若干計數脈沖,實現細分,具有良好的動態特性,應用廣泛。
1 圓光柵角度測量系統
文中設計的圓光柵角度測量系統含有大方位、大俯仰、小方位、小俯仰共四個圓光柵傳感器,它們被用來測量4個軸系的角度位置。圓光柵傳感器的光柵信號經細分計數電路板細分和計數后,以16 bits的總線方式輸出。
如圖1所示,四路圓光柵測角系統中大俯仰、小方位、小俯仰還在光柵傳感器上制作了正、反向光電限位開關。

圖1 4路圓光柵測角系統原理框圖Fig.1 Principle diagram of the four ways of gratings angle measuring system
4個圓光柵傳感器的正余弦波光柵信號輸入到細分計數板,4個獨立的移相電阻鏈細分電路對光柵信號進行移相細分,并通過電壓比較器而形成TTL方波信號,計數電路對細分后的光柵信號計數。同時零位信號將對計數器清零。
總線接口電路并行同步鎖存5個16 bits的光柵位置數據及正、反限位狀態。5個選通信號將分別讀出5個16 bits的鎖存器數據。
該圓光柵角度測量系統技術參數包括:測量范圍、光電限位范圍等,如表1所示。
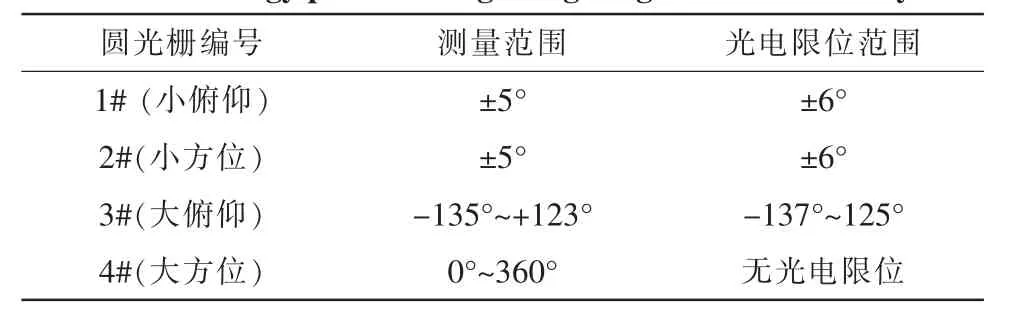
表1 圓光柵角度測量系統技術參數Tab.1 Technology parameters gratings angle measurement system
2 圓光柵傳感器測量原理
圓光柵傳感器主要由圓光柵、相位光柵、發光管、準直鏡及探測器組成,如圖2所示。
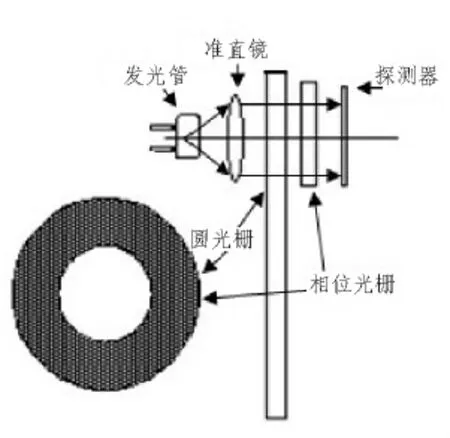
圖2 圓光柵傳感器Fig.2 Round grating sensor
其中圓光柵是一塊兒圓形的鉻層光學玻璃,在靠近其外圈的刻度線上,利用腐蝕等方法刻劃出周期性的扇形透光窗口。每一個透光和不透光的扇形圖案稱為一個刻劃周期T,每一圈中的刻劃周期數又稱為線對數。例如一個線對數為360的圓光柵,其刻劃周期數是一度。一般來說透光和不透光的扇形圖案的占空比為1:1。圓光柵的線對數越大,要求其直徑也就越大,則其測角分辨率也就越高。同時,要求其旋轉的安裝軸系的精度也就越高,才能相應提高其測角精度。
相位光柵也是一塊兒刻劃有與圓光柵相同刻劃半徑和相同刻劃周期圖案的鉻層光學玻璃,其二組光柵圖案錯開1/4個刻劃周期,這樣便可以判別圓光柵的旋轉方向。
發光管發出的光,經準直鏡后稱為平行光束,平行光束透過刻劃面相隔很近的圓光柵和相位光柵后,被光電探測器接收,并轉換為電信號。兩個探測器分別對準相位錯開1/4刻劃周期的兩組光柵窗,每個探測器可以覆蓋多個光柵周期。這樣,當圓光柵相對于相位光柵運動時,就可以得到相位差90°(1/4T)的兩路正弦波光柵信號。另外,如果在圓光柵和相位光柵上設計一組零位編碼窗,便可在圓光柵每轉動一圈得到一個確定圓光柵的絕對角位置的零位信號。
3 圓光柵測角信號細分電路
為提高測角分辨率和測角精度,可對原始的光柵信號進行電子細分。在某專用圓光柵測角系統中,多采用移相電阻鏈及方波四倍頻的方法來達到對光柵信號的20倍細分。
3.1 移相電阻鏈細分電路及原理
測角電路通常采用對信號周期進行計數的方法實現對角度的測量,若單純對信號的周期進行計數,則測角儀器的分辨力就是一個信號周期所對應的轉動角度量。為提高測角儀器的分辨力,應使用細分電路對信號進行最大限度的細分,從而生成具有不同相位的多個信號。將正余弦信號施加在電阻鏈兩端,在電阻鏈的節點上可得到相位各不相同的電信號。這些信號經整形,脈沖形成后,就能在余弦信號的一個周期內獲得若干計數脈沖,實現細分。
電阻鏈五倍頻細分電路如圖3所示。
整個細分電路由電阻移相網絡、比較器和邏輯電路3大部分組成 。
電阻移相網絡在第1、2象限內給出的移相角為 10路移相信號,移相電阻的取值首先應滿足式:φ=arctg(R1/R2),并盡可能兼顧到電阻系列的標稱阻值。
電壓比較器將10路移相信號與參考電平UR相比較,將正弦信號轉化為方波信號。電壓比較器一般接成施密特觸發電路的形式,使其上升沿和下降沿的觸發點具有不同的觸發電平,這個電平差稱為回差電壓。讓回差電壓大于信號中的噪聲幅值,可避免比較器在觸發點附近因噪聲來回反轉,回差電壓越大,抗干擾能力越強。但回差電壓的存在使比較器的觸發點不可避免地偏離理想觸發位置,造成誤差,因此回差電壓的選取應該兼顧抗干擾和精度兩方面的因素。
從比較器得到的10路方波信號再經過異或門邏輯組合電路,在3′和4′端獲得兩路相位差為90°的五倍頻方波信號,圖7為邏輯電路的工作波形。
電壓比較器一般接成施密特觸發電路的形式,使其上升沿和下降沿的觸發點具有不同的觸發電平,這個電平差稱為回差電壓。讓回差電壓大于信號中的噪聲幅值,可避免比較器在觸發點附近因噪聲來回反轉,回差電壓越大,抗干擾能力越強。但回差電壓的存在使比較器的觸發點不可避免地偏離理想觸發位置,造成誤差,因此回差電壓的選取應該兼顧抗干擾和精度兩方面的因素。
3.2 原理分析
設電阻鏈由電阻R1和R2串聯而成,電阻鏈兩端加有交流電壓 u1、u2,其中,u1=Esinwt,u2=Ecoswt。 如圖 4 所示。
輸出電壓的幅值與相位都與R1和R2的比值有關。不同相的輸出電壓信號經電壓比較器整形為方波,然后經邏輯電路處理即可實現細分。
應用疊加原理求出電阻鏈接點處輸出電壓為:


圖3 電阻鏈五倍頻細分電路Fig.3 Resistance chain five times frequency subdivision circuit

圖4 矢量圖Fig.4 Vector diagram
o
om
1

輸出電壓 uo可寫作:uO=uomsin(wt+φ)
改變R1和R2的比值,可以改變j,也就改變了輸出電壓的相位。電阻比的改變也改變了輸出電壓幅值uom;矢量uo的終點沿直線運動;j=45°時,uom有最小值。
j=0°~90°第一象限的情況如此。 電路兩端若接 cosωt和-sinωt,可以得到第二象限各相輸出電壓;接-cosωt和-sinωt,可以得到第三象限各相輸出電壓;接-cosωt和 sinωt,可以得到第四象限各相輸出電壓。不同相的輸出電壓信號經電壓比較器整形為方波,然后經邏輯電路處理即可實現細分。
4 結束語

圖5 邏輯電路的工作波形Fig.5 Waveform of logic circuit
文中設計了由電阻移相網絡、比較器和邏輯電路三大部分組成的圓光柵測角信號移相電阻鏈細分電路,對含有大方位、大俯仰、小方位、小俯仰4個軸系的角度位置的圓光柵角度測量系統進行角度測量。將測得的原始的光柵正余弦信號施加在電阻鏈兩端,在電阻鏈的接點上得到幅值和相位各不相同的電信號。這些信號經整形、脈沖形成后,就能在正余弦信號的一個周期內獲得若干計數脈沖,實現細分,提高測角分辨率和測角精度。
[1]張立,林玉池.光柵回轉式壓電微角度執行器的研究[J].傳感器與微系統,2010,29(1):58-61.ZHANG Li,LIN Yu-chi.Research on circular grating rotary piezoelectric Micro-angleactuator[J]. Transducer and Microsystem Technologies,2010,29(1):58-61.
[2]鮮立剛,劉玉成.高精度角度的測試[J].計量與測試技術,2010,37(12):29-30.XUAN Li-gang,LIU Yu-cheng.High precision angle of testing[J].Metrology and Measurement Technique,2010,37(12):29-30.
[3]蔣麗雁,于連棟.基于FPGA的光柵信號處理電路設計[J].工具技術,2010,44(5):100-102.JIANG Li-yan,YU Lian-dong.Circuit design of grating signal processing based on FPGA[J].Tool Engineering,2010,44(5):100-102.
[4]楊軍平,吳欣慧.基于CMOS圖像光柵傳感器的位移測量系統的實現[J].機械與電子,2010,45(5):490-491.YANG Jun-ping,WU Xin-hui.The design of displeasement measurement system based on CMOS image sensors in grating sensors[J].Machinery and Electronics,2010,45(5):490-491.
[5]Pozzi M,King T.Piezo electric actuatorsin micropositioning[J].Engineering Scienceand Education Journal,2001,10 (1):31-36.
[6]何勇,范永坤,王濤,等.基于FPGA的增量式光電編碼器計數電路設計[J].儀器儀表用戶,2008,38(3):91-92.HE Yong,FAN Yong-kun,WANG Tao,et al.Design of the circuit of couting for incremental eneoder based on FPGA[J].Instrument Application,2008,38(3):91-92.
[7]EberhartRC, SHIY.Particleswarmoptim-ization:developments,applications and resources[J].Congress on Evolutionary Computation,2001,56(8):81-86.
[8]李懷瓊,陳錢.新型光柵信號數字細分技術及其誤差分析[J].計量學報,2001,22(4):281-283.LI Huai-qiong,CHEN Qian.A new digitalsubdividing technique for grating signal and its error analysis[J].Acar Metrologica Sinica,2001,22(4):281-283.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
