軌道交通閘機系統中的人體識別技術
2012-01-16 08:24:58牛國柱李文文
城市軌道交通研究 2012年1期
牛國柱 宋 哲 李文文
(南京理工大學機械工程學院,210094,南京 ∥第一作者,副教授)
閘機作為地鐵系統的一個關鍵組成部分,是專門用來控制乘客通行的裝置。乘客在閘機刷卡后,閘機識別系統能分辨出是有效通行還是無效通行,進而準確開、合閘門。乘客能否方便快捷地進出閘機,取決于閘機性能的優劣,這主要與閘機控制系統中的人體識別算法及相關硬件組成、布置相關。
1 乘客通行狀況分類
研究人體識別算法,首先要對人體分類。根據行人數量、是否攜帶物品及人自身的行為特征等,對人體通過閘機通道的情況進行了初步的分類,如表1所示。
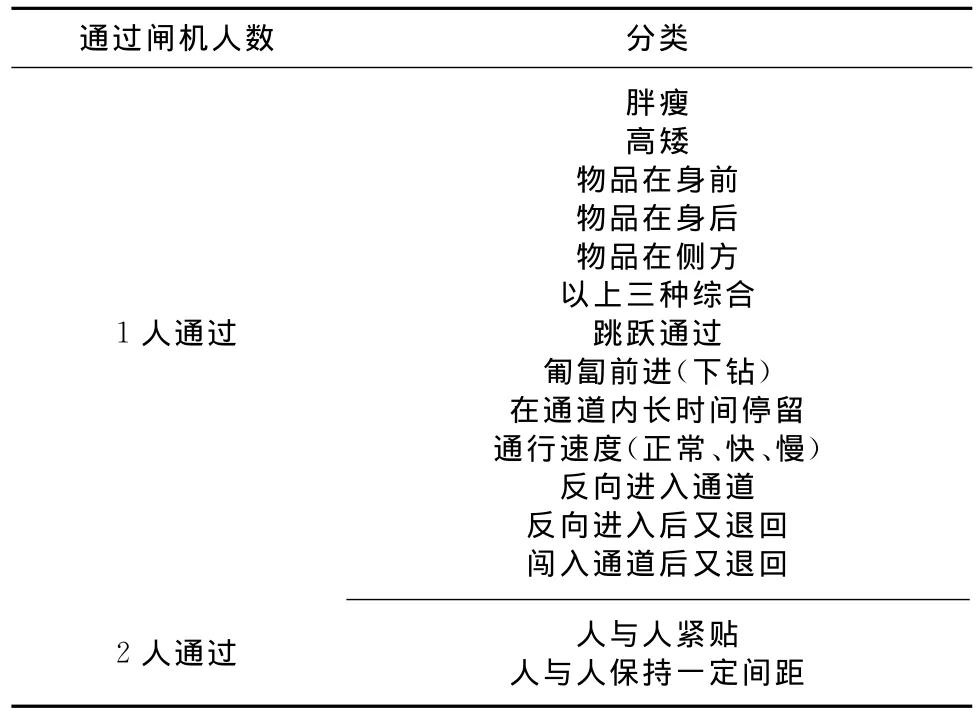
表1 乘客通行情況分類
2 傳感器空間位置布局
人體識別通常指人體生物特征識別方法。在閘機系統中,需要對通過行人進行計數。本文中介紹的是通過點式傳感器的狀態來識別人體。為了合理布置傳感器的位置,需要對人體比例結構進行分析。人是通過各個關節將身體各部分聯系在一起的,對關節比例的分析即是對人體比例的分析。若把人的身高記為H,那么人體自上而下,肘關節為0.61 H,髖關節為0.47 H,腕關節為0.47 H,膝關節為0.27 H,踝關節為0.045 H[1]。因此檢測一個行人,就是要對這些區別于其它物體的人所特有的屬性點(稱之為關鍵點)進行檢測。
首先確定傳感器在垂直方向上的空間布局。地鐵閘機通常的尺寸在2 200mm長、1 200mm高左右浮動。而中國男性的平均身高為1 700mm,女性為1 600mm[2]。因此,當人站在閘機中央時,腕關節正好位于閘機的上半邊緣處,膝關節處于閘機的中部,踝關節處于閘機的下半邊緣。人體軀干移動、四肢的擺動,就是在這幾個關節點帶動下完成的。據此,可以確定傳感器在縱向的大致位置,即腕關節、膝關節、踝關節處。
其次,初步確定傳感器在水平方向上的位置。中國人的平均步長為600mm左右,閘機入口距剪式門約1 100mm,故人體行走一步半至兩步可到達剪式門。閘機對人體的識別應在這一區域內完成。
3 算法分析
本文將1人、正常胖瘦高矮、不攜帶物品的通行視為正常通行,將攜帶物品、2人緊貼、跳躍匍匐、通道內滯留、進入通道后退回視為特殊通行。考慮到特殊通行情況復雜,而正常通行根據人自身特點規律性較強,故算法以檢測到正常通行為基準,然后再分別考慮各特殊通行,進而完成對乘客通行狀態的判斷。
3.1 區域識別
圖1所示傳感器分布圖中只畫出閘機的一側,另一側與之完全對應。依通行方向將整個閘機分為檢測區、安全區和出口。檢測區用來檢測通行人數;安全區是為了避免夾傷乘客所設置的,傳感器檢測到乘客位于此區域,阻擋門不會關閉;出口表示乘客通過閘機。
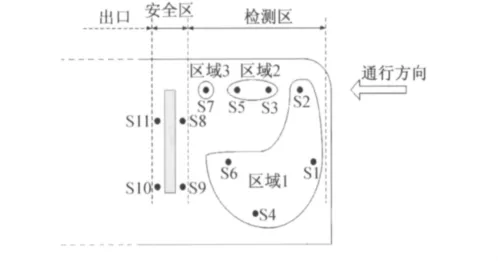
圖1 傳感器分布圖[3]
區域識別思想,顧名思義指通過不同的區域識別行人的思想。人們從一個舊區域進入到另一個新的區域是從無到有的一個無重復過程[3]。例如,圖1中傳感器S2開始處于無遮擋狀態,當人通過時處于被遮擋狀態,那么認為人進入了一個新的區域。把圍繞傳感器S1、S2、S4、S6一圈的部分作為第一個區域,記為“A1”。如果其中任意一個傳感器從未被遮擋狀態變為遮擋狀態,則稱人進入了區域A1。記此時A1的狀態為“1”,否則為“0”。將S3、S5所圍的部分作為第二個區域A2,S7所圍區域作為第三個區域A3。那么一個正常通行行為,是A1、A2、A3的一種狀態轉換(見圖2)。

圖2 區域識別狀態轉換圖
圖2 中,在t1到t2時刻,區域A1的狀態出現了0→1的變化;t2到t3時刻,區域A2的狀態出現了0→1的變化,且在A2出現0→1變化之后的時刻中A1再未出現0→1的變化。至此可判定有一名乘客通過。
如果對人體的步行特征進行分析,可得到圖3所示傳感器的布局。人體在步行時總是一條腿作為支撐腿,另外一條作為擺動腿[4]。如此反復交替,如果從外形上看,就是在雙腿叉開跨步狀態到雙腿并攏站立狀態的不斷交換中行進的[5]。當人的前后兩個動作出現差異時,說明人體是在運動的,因此如果要檢測行人就需要檢測這樣一個運動。依據人體行走的兩個極端姿態來布置傳感器的空間位置。在進入閘機處繪制警示黃線,提醒乘客在閘機外側刷卡。那么乘客刷卡進入閘機的第一個動作便是跨步狀態,由此設置S1、S2、S4作為第一個區域。第二個動作是站立狀態,由區域2中的傳感器S3來檢測。接下來又向跨步狀態轉移,同樣的膝蓋與腳踝在前,然后是上身軀干,因此區域3由傳感器S5、S6組成。S2、S3傳感器兼有檢測兒童的功能。當身高不足這一高度的兒童經過時,不計入通行人數計數器中。
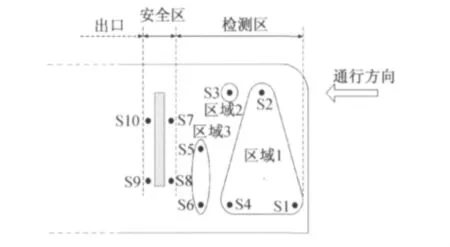
圖3 傳感器分布圖
區域識別思想的關鍵在于如何有效合理地對傳感器位置進行區域的劃分。區域識別可以滿足檢測通過閘機乘客數量的要求,但當后面乘客緊緊尾隨前面乘客進入時,閘機會誤以為還在同一區域中,并未發生由舊的區域進入新的區域這一情況,故對乘客的計數出錯;當與人體外形相似的物體進入時,還會誤判為人進入。
3.2 關鍵點識別
為進一步簡化傳感器的布局與數量,并保證快速檢測通過行人,彌補區域識別的不足,同時更清晰地區分人跟物體,需要找出人所特有的屬性。人在行走過程中,人體高度基本不變,寬度有變化但幅度不大,而下半部分腿部變化極為明顯。這是由于膝蓋帶動著小腿做反復擺動。人體腿部運動相當于在平面上繪制了一個扇形區域。分析擺動的過程,膝關節是扇形的頂點,踝關節則是扇形弧上的某幾個點,比膝關節更容易判斷。因此,應當選取踝關節所處位置作為傳感器采集的關鍵點[6]。
以圖4所示S2傳感器為例,當人體通過時,由于兩條腿的擺動,傳感器的狀態會呈現“遮擋→未遮擋→遮擋→未遮擋”,記S2狀態為“1→0→1→0”。若只使用S2,則乘客的1只腳邁進來之后又退回或者乘客跳躍著進入等極端行為將與正常行為混淆。因此再加入傳感器S4、S5。判斷時,其中任意2個傳感器沿通行方向按照時間先后出現1→0→1→0時,即有1名乘客通過閘機通道。在閘機上端,人體髖關節位置處的S1傳感器是為了檢測兒童設置的。若S1未檢測到信號,則判斷是兒童。因為判別行人通過的傳感器均位于閘機下方,為防止有人惡意跳躍,設置S3傳感器。正常通行時,S2、S4、S5的一種狀態轉換如圖5所示。
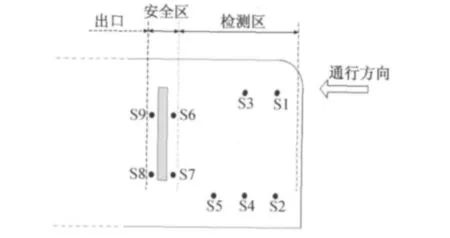
圖4 傳感器分布圖
這種傳感器布置的方式,可以較好地區分人與物體。若物體經過,傳感器的狀態會是“遮擋→未遮擋”;若有人尾隨通過,會出現2次“遮擋→未遮擋→遮擋→未遮擋”狀態。由于將傳感器設于腳踝處,這種識別思想可以省去判別人體前、后、側面背包的情形,簡化了判別人體的種類。
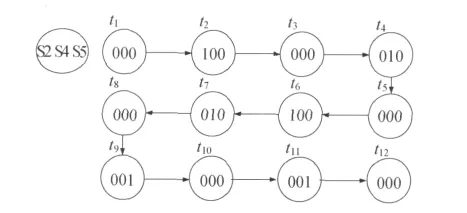
圖5 關鍵點狀態轉換圖
3.3 算法優化
區域識別方法在乘客非惡意逃票時,能夠判別通過行人數量。針對人體所特有的下肢關鍵點設置傳感器的方法,能夠區分與人相似的物體,也可以提高2人緊貼尾隨情況的識別率;但對于穿大衣或者裙子的乘客,由于傳感器無法檢測到腳踝處的運動情況,會使判斷結果出錯。因此,可以采用兩種算法相結合的思想,互為補充,達到有效判別乘客各種通行行為的目的。
通常乘客在刷卡進入閘機的同時也在向閘機內行走,故閘機首先檢測到的應該是人的站立狀態(如前所述是膝蓋跟腳踝先進入)。圖6中S1、S2就是據此布置的。緊接著進入跨步狀態,S5、S3是前后腳腳踝處,S4為中間手腕處。這3個傳感器構成區域2。乘客再向前就會經過S6所在區域。為了使2個區域的跨度更明顯一些(這樣可以更容易區分2個不同的動作),S6放在手腕處而不放在膝蓋處。S2、S3、S5同時兼做腳踝處3個關鍵點傳感器。

圖6 傳感器分布圖
4 試驗及判定結果分析
根據識別算法及狀態轉換圖編寫軟件。將區域識別和關鍵點識別結合起來,首先用區域識別的結果進行初步判定,然后再輔以關鍵點的修正。
本文針對幾種典型的通行行為,按圖6布置傳感器的空間位置,采集行人通過時各傳感器的狀態,并對結果進行分析。
4.1 單人正常通行
1名乘客正常通過閘機時,各傳感器的狀態如圖7所示。圖7中橫條表示傳感器被遮擋,即狀態為“1”,空白處表示未被遮擋,即狀態為“0”。首先使用區域識別判斷:在t1時刻虛線與橫條交匯處,區域A1出現“0→1”的變化,t2時刻,區域A2出現“0→1”的變化,且在A2出現“0→1”變化之后A1再未出現“0→1”的變化,至此可初步判定有1名乘客。再用關鍵點判斷:在t3、t4時刻S3傳感器出現“1→0→1→0”的變化,在t6、t7時刻S5傳感器出現“1→0→1→0”的變化,故關鍵點亦判斷出1名乘客。則最終結果為1人通過閘機通道。

圖7 傳感器狀態圖
4.2 單人攜帶物品通行
當1名乘客拖拽行李通過閘機通道時,各傳感器采集到的狀態如圖8所示。判定過程同上。區域判定中,A1、A2區域2次先后出現“0→1”,在此之后A1再未出現“0→1”,故判定為2人。關鍵點判定時,按時間先后,S2、S3傳感器出現“1→0→1→0”的變化,可判定為1人。最終認為是1人攜帶物品通過閘機通道。
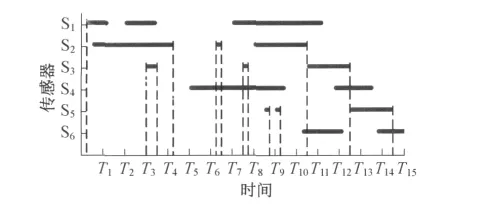
圖8 傳感器狀態圖
4.3 兩人緊貼通行
當2名乘客距離較近通過閘機通道時,各傳感器采集到的狀態如圖9所示。區域判定結果為1名乘客。關鍵點判定時,按時間先后,在S2、S3傳感器出現“1→0→1→0”后,S3、S5傳感器又出現“1→0→1→0”,故判定為2人。最終結果為2人緊貼通過閘機通道。

圖9 傳感器狀態圖
5 結語
本文分析了地鐵閘機系統的區域識別算法,并逐步簡化傳感器的數量與位置分布,提出了將區域識別和關鍵點識別相結合的思想。對1人、2人通過閘機的通行行為進行了試驗,并對幾種典型的通行情況作出試驗分析,進一步驗證了算法的有效性。這種識別思想在識別率方面有了較大的提高,能很好地防止逃票行為的發生。
[1]朱序璋.人機工程學[M].西安:西安電子科技大學出版社,1999.
[2]于明玖,葉軍,陸長德.中國成年人尺寸標準在產品設計中的應用方法[J].江蘇大學學報:自然科學版,2006,27(B09):64.
[3]曲日,鮑彥和,任長明.城市軌道交通中閘機事件識別技術[J].中國鐵道科學,2006,27(4):112.
[4]何凱,姜昱明.虛擬人行走運動的研究與實現[J].計算機仿真,2005,22(2):139.
[5]Mobasseri B G,Amin M G.A time-frequency classifier for human gait recognition[C]∥ Orlando:The International Society for Optical Engineering,2009:3.
[6]魏國.基于步態識別的離散XYT模型的應用研究[D].天津:天津大學軟件學院,2008.
猜你喜歡
中學生數理化·中考版(2022年12期)2022-02-16 07:36:56
今日農業(2021年8期)2021-11-28 05:07:50
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中國衛生(2014年2期)2014-11-12 13:00:16