智能視頻監控關鍵技術分析
2012-01-25 07:52:30肖沁雨
制造業自動化 2012年12期
肖沁雨
(北京郵電大學,北京 100876)
0 引言
在計算機強大的數據處理功能幫助下,智能視頻監控系統(IVS)能高速分析計算視頻圖像中的海量數據,并對于其中關鍵信息進行自動的分析和提取工作,這樣就可以對于不同目標對象進行識別,把用戶不關心的數據過濾掉。同時在自動識別不同目標對象時候,還能夠發現系統中的異常情況,輔以適當的分析和描述,進行最快方式的報警處理,這樣還能有效幫助相關人員進行危機處理。所以有人曾這樣形象的描述智能視頻監控系統:“智能視頻監控系統就是對傳統的只有眼睛的視頻監控系統裝上大腦,使其具有更為強大的自動分析判斷的能力,從而實現其真正的智能化的功能和作用”[1,2]。本文主要針對智能視頻監控技術中的運動目標的跟蹤,還有運動目標的檢測相關技術進行重點分析。
1 運動目標檢測和提取
將運動目標從視頻序列背景中提取出來就是運動目標檢測的最為主要目的,其作為智能視頻監控中處理的首先工作來說,其基礎作用十分重要,結果直接影響到智能視頻監控技術的相關后續處理工作[3]。
1.1 背景差分法
對于背景差分法來說,運動目標的獲得則是通過視頻圖像與背景圖像相比較。盡管該方法思路比較簡單,但是純背景在現實生活中的所獲得的視頻幀序列往往難以得到。這樣,背景從原始的視頻幀序列中獲取,即在運動目標檢測之前進行背景建模就十分重要。對于背景差分法來說,盡管思想比較簡單,但是背景模型的建立則是一個難點。運動目標能被完整的分割開來,但是當存在遮擋和陰影等復雜背景的情況或者動態背景的時候,這樣實時性方法比較差。所以說,這方法針對面積不大的目標,主要在靜態或準靜態背景下比較適用。
1.2 相鄰幀間差分法
所謂的相鄰幀間差分法,就是視頻圖像序列差分法,相鄰的兩、三幀圖像亮度差能夠使得視頻圖像序列中的運動目標特性表現出來,這樣就可以對于運動目標進行確定。該方法思想也非常簡單,實現起來較為容易。對于動態變化場景來說,實時性一般較好,但有時對于運動目標的所有像素的提取來說,可能存在一定的困難,這樣情況在背景顏色與運動目標顏色相差不大時,尤為明顯,因為很有可能出現陰影干擾,以及相關的“漏檢”現場,誤將背景檢測作為運動目標的部分。這種方法主要是按照靜態背景條件下,目標運動稍快較為適用,同時要求不高的圖像分割精度。
1.3 光流法
光流(Optical Flow)計算技術就是,當運動目標在場景中運動時,其在視頻圖像中對應的像素點的亮度也在運動,而這種視頻圖像中各個像素點所表現出來的亮度模式的運動就被稱之為光流。可見光流既表現出了視頻圖像中的亮度變化,同時也包含了運動目標的運動信息,因此根據光流法所表達出的圖像的這些變化信息,我們可充分的利用其作為運動目標的運動檢測。根據光流的定義,可以進一步的引入光流場的定義,根據所賦予的每個像素點的瞬時速度矢量,使得運動目標在運動過程中形成了一個二維的瞬時速度場,這個瞬時速度場,即就是運動場景中視頻圖像各個像素點所形成的三維速度矢量的平面投影。因此在運動的某一瞬間,我們可以得到視頻圖像中各個像素點與三維空間物體中各點的一一對應關系,由此可見,光流也包含了運動場景中三維空間物體的豐富信息。下面動態分析視頻圖像,按照各個像素點在視頻圖像中的光流矢量特征。當運動目標不存在視頻圖像中,在整個視頻圖像區域中,光流矢量是連續變化的;而當運動目標存在于視頻圖像中時,對于運動目標和背景圖像來說,相對運動情況往往存在,這就是造成鄰域背景與動目標所形成的速度矢量不同原因,也就從而能夠有效檢測運動目標及其位置。
針對光流法特點,場景中的任何信息不需要提前知道,也能檢測出獨立運動目標。對于動態背景較為適用,一方面圖像的三維結構豐富的信息能夠攜帶,另外一方面還具有運動目標的運動信息。但是計算量大、容易受到噪聲影響則是光流法的缺點。當實施實時檢測時候,還必須應該借助硬件才能實現,因而在應用在運動目標檢測精度要求比較高的情況下。
2 運動目標描述
對于跟蹤過程中的運動目標、還有視頻圖像序列中檢測到的運動目標進行相關分析研究,需要利用一種方法在盡量減少冗余信息的前提下,進行表示的工作就是目標描述。運動目標跟蹤的算法分類與其緊密相關,這是因為圖形描述法不同,往往影響目標跟蹤算法的不同,外輪廓描述法,矩形框描述法,點描述法,區域描述法還有基于圖像的描述法是集中常見的描述方法。
3 運動目標跟蹤
可以通過不同的特征值,同一運動目標的不同視頻幀的視頻圖像序列可以相互關聯起來,運動軌跡得以計算出來。所以可以看出,同種或者某種特征相似的元素集合可以在視頻序列圖像中找到,這就完成了目標跟蹤,同時,特征模板的提取則極大影響到了匹配算法的準確性。圖1為目標跟蹤坐標示意圖,我們看一下利用直觀的圖形方法定義運動目標的跟蹤問題。
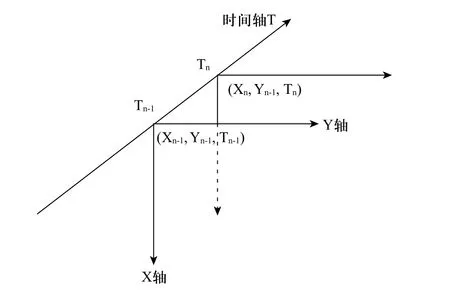
圖 1 目標跟蹤坐標示意圖
在圖1中,二維圖像從位置1(Xn-1,Yn-1,Tn-1)移動到位置2(Xn,Yn,Tn),定義位移矢量為(ΔXn,ΔYn)。則對于相鄰兩幀視頻圖像來說,物體表面上的各點相應的位移稱為視差。所以,運動目標的跟蹤就可以看作是目標的視差,并通過建立與運動目標一一對應關系在連續的視頻序列中。
跟蹤過程的兩個重要指標是可靠性和精確度。對于不同的運動狀態,不同的跟蹤算法針對運動目標跟蹤被采用。比如,動機性不強的較小面積的跟蹤目標來說,一般為了提高精度而采用濾波跟蹤方法;而具有一定面積的跟蹤目標,且距離較近時,具有較大的抖動時,為了保證跟蹤目標的穩定性和精確性,一般采用匹配跟蹤方法和窗口質心跟蹤運動目標的特征信息來進行跟蹤,考慮運動目標跟蹤算法時,則不用考慮運動目標的整體特性。在相應的特征集合被搜索到,運動目標跟蹤成功,不僅大大減少了運算量,同時還具有較強的抗干擾能力,這是因為不變形和抗干擾性則為選取的特征,這也是大部分基于特征的目標跟蹤算法的特點。其中,基于紋理特征的跟蹤,基于運動特征的跟蹤,基于顏色特征的跟蹤和基于形狀特征的跟蹤等是常見的集中基于特征方法,但是在實際的算法中,為了達到更好的效果,往往是幾種方法的綜合使用。
可以看出,運動目標的跟蹤問題可以按照以下三個步驟進行:第一,特征選取,顯著特征從圖像中進行選取;第二,特征集合的對應關系在視頻序列中找到,完成特征匹配,還要對其進行相關一定分析處理;第三,計算相關的運動信息。
4 運動目標識別
從視頻圖像序列中按照一定的技術方法,對于輸入的圖像序列進行處理,然后進行提取和識別處理,這樣就完成了運動目標識別工作。一般來所,運動目標識別分為有形運動目標識別和空間點的運動目標識別,他們的區分依據就是相機中成像的大小在識別目標由遠及近移動過程中的變化。
基于一致樣本的前提下進行的判決,首先需要得到感興趣目標和背景的部分樣本,建立相應的識別模型。目前,關于目標識別領域中出現的各種的目標識別算法,這些算法各具特點,一般包括基于知識的自動目標識別方法、經典的統計模式識別方法、基于多傳感器信息融合技術的自動目標識別方法、基于模型的自動目標識別方法以及基于統計學習的自動目標識別方法等等。
運動目標識別與跟蹤系統只需要對于目標的類型進行判斷,而不需要了解圖像中更多的細節問題,所以這里統計識別方法一般就是指提到的基于目標跟蹤的識別方法。
5 運動目標行為分析
強調智能視頻監控中智能化,主要體現在運動目標行為分析作用更加突出,一方面運動目標檢測提取和跟蹤相關諸多大量數據運算可以實現,另外一方面,體現出監控系統的人性思考特點,可以經過自主的,不加外人干涉而自動對于運動目標進行分析并處理,這樣就能有體現整個監控系統的智能化特點。
比如,在了解人的行為包括跳、走、跑、躺、跳等等行為后,車的行為主要包括碰撞和車輛加速等等,這樣針對某視頻序列中的運動目標為人和車進行運動目標識別可以分析得到上述結論。其中,智能化能夠認為是為監控系統的告警提供有效的數據基礎,運動目標識別的基礎上進行運動目標的行為分析。
目前,主要是在特定場景下的運動目標行為分析工作,一般來說,已知場景中發生的所有行為,或者已知所有相關的行為模式,并且這種行為模式的訓練往往需要大量的樣本。但是在實際情況下,往往要事先獲得監控場景中的所有目標行為模型和大量訓練樣本具有很大難度,所以說,一種自適應的行為分析模型的學習方法就顯得格外重要。
6 結束語
本文針對智能視頻監控系統中關鍵技術進行分析,主要包括運動目標的描述、運動目標的跟蹤、運動目標的檢測、運動目標的識別以及運動目標的行為分析,分析而來整個智能化監控系統的特點,一定程度上分析了目標檢測與目標跟蹤的常用方法和算法,對于今后開展智能視頻監控發展具有一定幫助。
[1]韓曉冰,王瑋明.基于軟交換的井下視頻監控系統[J].制造業自動化,2011,33(2).
[2]王鵬,朱秀昌.智能視頻監控中滯留物與人的關聯分析算法[J].電視技術,2011,35(3).
[3]李鵬飛,陳朝武,李曉峰.智能視頻算法評估綜述[J].計算機輔助設計與圖形學學報,2010,22(2).
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
當代陜西(2020年14期)2021-01-08 09:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12
