基于CX20106A的超聲波測距設(shè)計
2012-01-29 07:19:42方正超姚善學(xué)
電子設(shè)計工程 2012年15期
方正超,姚善學(xué)
(貴州大學(xué) 理學(xué)院,貴州 貴陽 550025)
在日常生活中超聲波技術(shù)都有著廣泛的應(yīng)用,例如催化技術(shù)、探傷技術(shù)、清洗技術(shù)、測距技術(shù)等等[2-5]。超聲波測距,多應(yīng)用于汽車倒車雷達、建筑工地以及一些工業(yè)現(xiàn)場的位置監(jiān)控如液位、井深的測量等,一些不方便有形測量工具進行測量的場合多可以考慮使用超聲波測量技術(shù)來測量[1-2]。利用超聲波檢測迅速、計算簡單、易于做到實時控制,并且測量精度能夠達到工業(yè)實用要求。為了試驗超聲波測距控制精度,使得它更加適合于現(xiàn)場實際生活中的檢測領(lǐng)域。同時簡化工業(yè)現(xiàn)場的測量又能達到預(yù)期的測量精度,能夠符合我們現(xiàn)場測距的要求,給工程實踐帶來更多的簡便易行的方案[3]。
1 超聲波測距原理
超聲波測距由超聲波發(fā)射極T40-16發(fā)射聲波,經(jīng)過障礙物反射,回到接收端R40-16接收到聲波,然后通過單片機計算兩次接到聲波的時間差來計算障礙物與探頭的距離。超聲波測距示意圖如圖1所示。
如上圖1所示,被測距離為H,兩探頭中心距離的一半用M表示,超聲波單程所走過的距離用L表示,由圖中關(guān)系

圖1 超聲波測距示意圖Fig.1 Schematic diagram of ultrasonic ranging
可得:

將式(2)代入式(1)可得:

在整個傳播過程中,超聲波所走過的距離為:

式中:v為超聲波的傳播速度;t為傳播時間,即為超聲波從發(fā)射到接收的時間。
將式(4)代入式(3)可得:

當(dāng)被測距離 H 遠遠大于 M 時,cos[arctan(M/H)]≈1,于是式(5)變?yōu)椋?/p>

由此可見,要想測得距離H,只要測得超聲波的傳播時間t和在這個時候?qū)?yīng)的外界溫度(℃)然后代入表1對應(yīng)的速度中即可。溫度和速度對應(yīng)表如表1所示。

表1 溫度與速度對應(yīng)表Tab.1 Temperature and the speed of table
2 總體設(shè)計
該方案主要通過T/R40-16的集成分立收發(fā)超聲波模塊單元來發(fā)射和接收超聲波,然后通過計算發(fā)射和接收到的時間差來計算障礙物和測距探頭的距離。同時通過DS18B20來測試環(huán)境溫度來進行溫度補償,來實現(xiàn)本設(shè)計中的更高精度保證設(shè)計方案的可行性[5-6]。系統(tǒng)設(shè)計框圖如下:

圖2 超聲測距系統(tǒng)設(shè)計框圖Fig.2 Design of ultrasonic measurement system block diagram
3 系統(tǒng)硬件設(shè)計
3.1 控制單元At89c52
控制模塊主要由At89c52單片機、控制電路、復(fù)位電路實現(xiàn),其中還包括振蕩電路使用12 MHz高精度晶振蕩電容選擇30 pF小瓷片電容;復(fù)位電路使用電路;使用普通的電解電容與金屬膜電阻。該單片機有一下有點:兼容MCS-51指令系統(tǒng)、8k可反復(fù)擦寫(1000次以上)Flash ROM、32個雙向I/O口、256×8bit內(nèi)部 RAM、3個 16位可編程定時/計數(shù)器中斷、時鐘頻率可達24 MHz、2個串行中斷,可編程UART串行通道、2個外部中斷,共8個中斷源。
3.2 超聲波產(chǎn)生電路
超聲波在空氣中傳播功率及精度與頻率成正比,比較和分析幾個常用超聲波頻率的特點,最終選取頻率為40 kHz[4]。為了便于超聲波的發(fā)射與接收,超聲波發(fā)射探頭采用共振頻率為40 kHz的TCT40-16探頭,接收探頭采用RCT40-16。超聲波發(fā)射電路主要由超聲波換能器和反相器74LS04構(gòu)成,單片機P1.0端口輸出40 kHz間斷方波,此時定時器開始計時,信號經(jīng)兩反相器送到超聲波換能器的兩個電極,可以提高超聲波的發(fā)射強度。輸出端采用兩個反相器并聯(lián),可以提高驅(qū)動能力。電阻R1、R2可以增加超聲波換能器的阻尼效果,這樣可以縮短振蕩時間,提高74LS04輸出高電平的驅(qū)動能力。超聲波發(fā)射電路原理圖如圖3所示。
3.3 超聲波接收電路
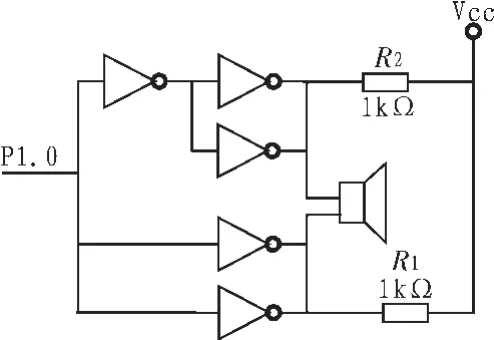
圖3 超聲波發(fā)射電路原理Fig.3 Ultrasonic transmitting circuit principle
超聲波接收電路采用SONY公司的CX20106A集成電路,對接收探頭收到的信號進行放大、濾波。它是一款紅外線檢波接收的專用芯片,有較強的抗干擾性和靈敏度。管腳1是超聲波信號輸入端,其輸入阻抗約為40 kΩ;管腳2的C2、R3決定接收換能器的總增益,增大電阻R或者減小C,將使放大倍數(shù)下降,負反饋量增大,電容C的改變會影響到頻率特性,實際使用中一般不改動,推薦選擇參數(shù) R=4.7,C=3.3 μF;管腳3與GND之間連接檢波電容,考慮到檢波輸出的脈沖寬度變動大,推薦參數(shù)3.3 μF;管腳5上的連續(xù)電阻R4用以設(shè)計帶通濾波器的中心頻率,阻值越大,中心頻率越低,取R=200 kΩ時,中心頻率約為42 kHz;管腳6與GND之間接入一個積分電容,標(biāo)準(zhǔn)值為330 pF如果該電容取得太大,會使探測距離變短;管腳7是遙控命令輸出端,它是集電極開路的輸出方式,因此該引腳必須接上一個上拉電阻到電源端,該電阻推薦阻值為R5=220 kΩ,沒有接收信號時該端輸出為高電平,有信號時則會下降;管腳8接電源正極4.5~5 V。超聲波接收電路原理圖如圖4所示。
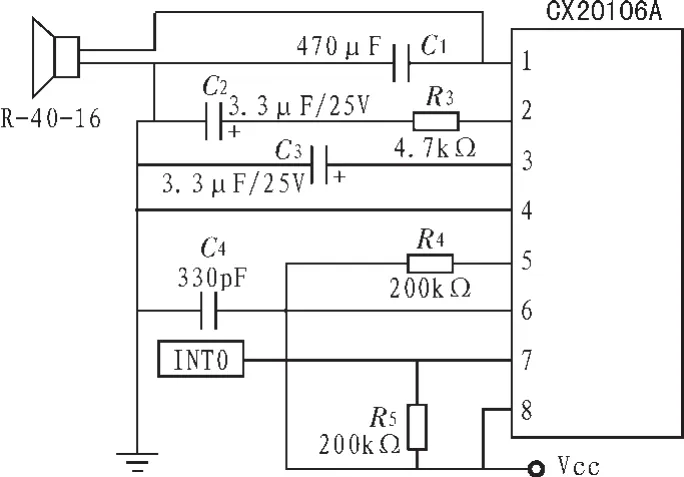
圖4 超聲波接收電路原理圖Fig.4 Ultrasonic receiving circuit principle diagram
3.4 DS18B20的溫度補償模塊
溫度測量電路主要作用是測量電子器件周圍實時環(huán)境溫度,超聲波測距依據(jù)是基于超聲波在空氣中的傳播速度,但溫度會影響波速,為了使系統(tǒng)更加穩(wěn)定使測得的數(shù)據(jù)更加精確能夠更好的符合我們實際使用中的要求更好的達到工程實際中的精度要求,這里可以通過增加溫度補償電路,來解決實測精度不高的現(xiàn)象。采用DS18B20數(shù)字溫度芯片采集當(dāng)前空氣溫度,單片機通過單總線接口讀到該數(shù)據(jù),測溫分辨率可以達到0.0125℃,該方法可有效地提高測距精度,且能簡便的達到設(shè)計目的。溫度補償模塊電路圖如下圖5所示。
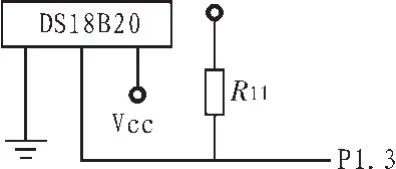
圖5 溫度補償模塊電路圖Fig.5 Temperature compensation circuit module
4 系統(tǒng)軟件設(shè)計
4.1 系統(tǒng)軟件設(shè)計流程圖
該測距系統(tǒng)的軟件設(shè)計流程圖如下圖6所示,主要由外部中斷INT0來向單片機申請,當(dāng)R40-16接收到單片機的反射信號時通過INT0來申請中斷然后有定時器T0來計算這段兩次反射回來波形的時間差,在通過以設(shè)定好的軟件來計算障礙物與發(fā)射探頭的距離。然后由此得出這段需要測量的距離,最后顯示在LCD顯示屏幕上。
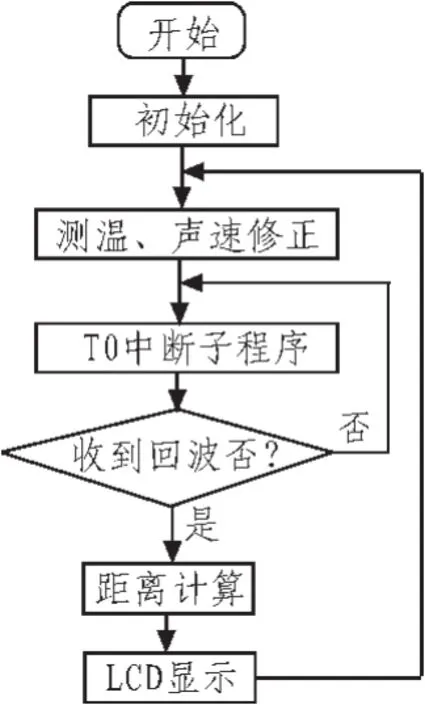
圖6 測距系統(tǒng)軟件設(shè)計流程圖Fig.6 Ranging system software design flow chart
4.2 收發(fā)顯示模塊軟件設(shè)計
在軟件設(shè)計中首先對系統(tǒng)進行初始化,設(shè)定TOMD為T0工作于方式1即16位定時計數(shù)工作模式下,置總中斷允許為EA,將顯示模塊進行清0處理,調(diào)用超聲波發(fā)射子程序發(fā)射超聲波,延遲一段時間(設(shè)計中延遲為150 ms,可以自行設(shè)定一個合適的延遲)。打開外部中斷INT0來接收返回的超聲波信號,當(dāng)單片機檢測到有外部中斷時就用發(fā)射和接收回來的這段時間差來計算障礙物與探頭的距離,最后通過LCD的display函數(shù)顯示在LCD屏幕上。主程序部分設(shè)計如下:


5 結(jié)束語
本設(shè)計通過硬件實現(xiàn),進行實驗測距都能達到較高精度。該設(shè)計有結(jié)構(gòu)簡單,易于操作,成本低廉,精確度較高等優(yōu)點適合于工程實踐當(dāng)中對于測距不是要求特別高的領(lǐng)域,而且可以省去好多操作上的麻煩進行實時數(shù)據(jù)顯示。實際制作之中由于加入了DS18B20進行溫度補償使得測距精度有較大的提高。在設(shè)計時采用CX20106A芯片用于檢波放大,減少了電路之間的互相干擾,減小了電噪聲使得系統(tǒng)功能更加的溫度。該系統(tǒng)可廣泛的應(yīng)用于倒車雷達、機器人檢測、工程測距以及諸多測量領(lǐng)域。
[1]宋楊,王宗偉,戴景民.前置反射式發(fā)射率在線測量裝置的研制[J].哈爾濱理工大學(xué)學(xué)報,2009,14(3):126-130.SONG Yong,WANG Zong-wei,DAI Jing-min. The development of emissivity on-line measurement device based on front reflection[J].Journal of Harbin Univefsity of Science and Technology,2009,14(3):126-130.
[2]王峰,葛立峰.一種高精度超聲測距系統(tǒng)的設(shè)計[J].計算機技術(shù)與發(fā)展,2008,18(1):229-231.WANG Feng,GE Li-feng.Design of an ultrasonic range measurement system with high precision [J].Competer Technology and Development,2008,18(1):229-231.
[3]Tikanmkia,Mkeltpietikinenaeta1.Multi-robot system for exploration in an outdoor environment[J].Ro-botics and Applications and Telematies,2007,9(1):563-567.
[4]劉升平,王劍,葛紅.超聲波測距系統(tǒng)的開發(fā)與研究[J].計算機工程與應(yīng)用,2009,45(25):78-81.LIU Shengping,WANG Jian,GE Hong.Ultrasonic ranging system development and resear-Sh[J].Computer Engineering&Applications,2009,45(25):78-81.
[5]彭翠云,趙廣耀,戎海龍.汽車倒車系統(tǒng)中超聲波測距模塊的設(shè)計[J].壓電與聲光,2008,30(2).251-254.PENG Cui-yun,ZHAO Guang-yao,RONG Hai-long.The design of ultrasonic distance measur-ing system used on carbacking system[J].Piezoelectrics&Acoustooptics,2008,30(2):251-254.
[6]高飛燕.基于單片機的超聲波測距系統(tǒng)的設(shè)計[J].信息技術(shù),2005,29(7):128-129.GAO Feiyan.Design of ultrasonic distance measurement system based on microprocessor[J].Information Technology,2005,29(7):128-129.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
