X光機(jī)數(shù)字圖像增強(qiáng)器的關(guān)鍵技術(shù)研究
2012-01-31 05:21:42饒謙,田豐
電視技術(shù) 2012年13期
關(guān)鍵詞:檢測
饒 謙,田 豐
(上海大學(xué) 影視藝術(shù)技術(shù)學(xué)院 影視工程系,上海200072)
傳統(tǒng)的X射線膠片照相技術(shù)工序復(fù)雜,照相費(fèi)時(shí)且費(fèi)力,需要大量的膠片,成本很高;膠片照相需要經(jīng)過拍片、洗片、評片,最后才能出具膠片的檢測報(bào)告;不能滿足實(shí)時(shí)成像、實(shí)時(shí)檢測與評估的要求;檢測出的大量膠片不便于存儲(chǔ)。因此,傳統(tǒng)的X射線膠片照相已經(jīng)逐漸落后于工業(yè)射線檢測的發(fā)展進(jìn)程。而基于圖像增強(qiáng)器的X射線成像技術(shù)已普遍使用,它能直觀、快速地對物體進(jìn)行實(shí)時(shí)檢測,較傳統(tǒng)膠片成像有其優(yōu)勢[1]。
引入圖像增強(qiáng)器技術(shù)后,降低了受照劑量,圖像質(zhì)量也得到了改善。但它在將X光輻射轉(zhuǎn)換成可見光圖像的過程中會(huì)帶來一系列問題,如引入了大量的噪聲,造成了圖像質(zhì)量差、信噪比低以及瑕疵點(diǎn)等問題,使不經(jīng)過處理的視頻圖像無法應(yīng)用到實(shí)際中去[2]。
本文以研制X光數(shù)字圖像增強(qiáng)器為目標(biāo),構(gòu)建影像處理系統(tǒng)的軟硬件平臺(tái),研究影響成像質(zhì)量的關(guān)鍵因素,提出改善影像質(zhì)量的方法。針對現(xiàn)有的預(yù)設(shè)定降噪方法,提出了一種基于動(dòng)態(tài)檢測的動(dòng)態(tài)降噪算法,改善了在運(yùn)動(dòng)環(huán)境下的降噪質(zhì)量,并且針對瑕疵點(diǎn)存在的問題,提出了一種針對瑕疵點(diǎn)的檢測與校正算法,滿足了用戶的需求。
1 系統(tǒng)的硬件設(shè)計(jì)
1.1 系統(tǒng)的總體設(shè)計(jì)
如圖1所示,視頻通過CCD攝像頭以PAL制式輸入到解碼芯片中,在視頻芯片中進(jìn)行A/D轉(zhuǎn)換,變成符合ITU-BT.656標(biāo)準(zhǔn)的數(shù)字視頻信號,再將其輸入到DSP處理器中。

圖1 系統(tǒng)的總體設(shè)計(jì)
在DSP處理器中:工作狀態(tài)下循環(huán)等待ARM子系統(tǒng)的命令,將接收到的數(shù)字視頻信號根據(jù)對應(yīng)命令完成對視頻圖像的相應(yīng)算法,同時(shí)不斷將每一幀圖像的平均亮度值反饋給ARM子系統(tǒng);在圖片保存狀態(tài)中,將保存在SDRAM中的圖像數(shù)據(jù)回送給ARM子系統(tǒng)。在ARM子系統(tǒng)中:當(dāng)處于工作狀態(tài)時(shí),循環(huán)等待鍵盤指令,在驗(yàn)證指令的合法性之后,通過串口將對應(yīng)命令發(fā)送給DSP處理器,同時(shí)不斷接收DSP發(fā)送過來的每一幀圖像的平均亮度值,再經(jīng)過D/A和運(yùn)算放大器轉(zhuǎn)換到0~12 V的模擬信號,為X光機(jī)射線的反饋控制提供一個(gè)接口;當(dāng)處于圖片保存狀態(tài)時(shí),ARM子系統(tǒng)將接收到的圖片通過SPI總線,依次保存到SD卡中。在完成指定視頻圖像處理算法后,DSP通過其內(nèi)置的視頻編碼器(VENC)將數(shù)字視頻信號編碼為PAL制式模擬信號輸出到監(jiān)視器上。
1.2 視頻編碼/解碼模塊的設(shè)計(jì)
輸入視頻的解碼芯片采用的是PHILIPS公司的SAA7113,該芯片是一種I2C總線控制的視頻處理芯片,能夠方便地進(jìn)行信號采樣和色彩空間轉(zhuǎn)換,可將輸入的標(biāo)準(zhǔn)視頻信號轉(zhuǎn)換為數(shù)字視頻信號[3]。輸出視頻的編碼芯片采用的是ADI公司的ADV7160[4],這是一款高度集成的芯片,既包含精密的模擬電路,又包含高速的數(shù)字電路,通過精心設(shè)計(jì),能確保數(shù)字電路對整個(gè)模擬電路的干擾減少到最小,它通過I2C總線進(jìn)行控制,將數(shù)字形式的ITU-R BT601/656數(shù)字視頻數(shù)據(jù)轉(zhuǎn)換成標(biāo)注的模擬基帶電視信號,兼容PAL,NTSC等格式的輸出。
1.3 DSP圖像處理模塊
考慮到整個(gè)系統(tǒng)要實(shí)現(xiàn)功能的多樣性與實(shí)時(shí)性,整個(gè)圖像處理算法的核心硬件DSP芯片的型號,選用了TI公司的TMS320DM6437。作為TI公司C64x+系列的一款芯片,其主頻達(dá)400~700 MHz,同時(shí)其峰值運(yùn)算速率更是高達(dá)3 200~5 600 MInstruction/s(兆指令/秒)[6-7]。相對于TI公司的C64x系列DSP,在保持指令兼容性的同時(shí),TMS320DM6437有著自己獨(dú)特的擴(kuò)展指令集,同時(shí)擁有更大的cache配置容量和更為靈活的cache配置方式,這樣能夠充分地保障視頻系統(tǒng)的實(shí)時(shí)性[3,5]。
1.4 ARM控制子系統(tǒng)
ARM控制子系統(tǒng)的主控芯片,選擇性價(jià)比較高的STM32F101VB芯片。該芯片采用了基于專為要求高性能、低成本、低功耗的嵌入式應(yīng)用專門設(shè)計(jì)的ARM Cortex-M3內(nèi)核,其內(nèi)核性能要優(yōu)于等價(jià)位的ARM7TDMI。
ARM控制子系統(tǒng)主要實(shí)現(xiàn)的功能有:檢測外圍按鍵/撥碼開關(guān)輸入,解析完成后將對應(yīng)的命令通過串口發(fā)送給DSP處理器;接收DSP傳遞過來的視頻圖像的當(dāng)前平均亮度信號,通過D/A轉(zhuǎn)換到0~12 V模擬輸出,用于自動(dòng)增益控制(AGC);接收DSP從串口傳遞過來的已存儲(chǔ)圖片,將其存入SD卡中。
ARM控制器雖然自帶DAC轉(zhuǎn)換,但其輸出的模擬電壓值范圍是0~3.3 V。而系統(tǒng)所要求的能夠用于AGC控制的信號是0~12 V的模擬電壓輸出。所以必須要加上集成運(yùn)算,將電壓值放大。為了保證放大出來電壓的穩(wěn)定性,采用了2級正向放大電路。
2 系統(tǒng)圖像處理的方法與實(shí)現(xiàn)
2.1 卷積濾波降噪算法
卷積濾波算法是一種相鄰域處理的方法,具體運(yùn)算方法是將鄰域內(nèi)各個(gè)像素與對應(yīng)的系數(shù)相乘,然后累加出響應(yīng)。
卷積濾波的方法能實(shí)現(xiàn)降噪的功能,但效果提升有限,且由于其算法的固有原因,會(huì)導(dǎo)致處理后的圖像分辨力有所下降。
2.2 多幀平均降噪算法
在X射線圖像處理中,消除隨機(jī)噪聲最常用、也是最有效的方法是多幀平均法[8]。
當(dāng)幾幀圖像累加平均后,由于物體的無噪聲源圖像是作重復(fù)線性累加,對應(yīng)的隨機(jī)噪聲卻是作2次項(xiàng)累加,因此,當(dāng)N幀圖像進(jìn)行累加后,無噪聲源圖像部分放大了N倍,而隨機(jī)噪聲放大了倍,對應(yīng)的信噪比SNR就提高了倍。
經(jīng)過平均幀算法處理后,圖像的質(zhì)量有了明顯的改善。由實(shí)驗(yàn)結(jié)果圖2a、圖2b、圖2d可以看出隨著平均幀數(shù)的逐步增加,圖像去噪效果越好、圖像越清晰。但上述的分析都是以假設(shè)被測物體未發(fā)生劇烈運(yùn)動(dòng)為前提的。而當(dāng)物體運(yùn)動(dòng)時(shí),采用此種算法將會(huì)使視頻圖像產(chǎn)生拖影與模糊,累加幀數(shù)越多,此種現(xiàn)象也會(huì)越嚴(yán)重。隨著累加的幀數(shù)增多,需要占用的存儲(chǔ)空間會(huì)更多,算法的時(shí)間運(yùn)算復(fù)雜度也會(huì)增強(qiáng)。因此這對于算法在嵌入式系統(tǒng)中實(shí)現(xiàn)的硬件成本也會(huì)大大提高。
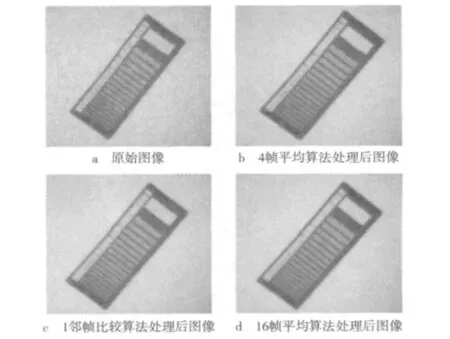
圖2 平均幀算法與鄰幀比較降噪算法
2.3 鄰幀比較降噪算法
由于X光成像系統(tǒng)噪聲主要表現(xiàn)特征為圖像上顆粒性的時(shí)間和空間隨機(jī)亮點(diǎn)閃爍[9]。
現(xiàn)采用1鄰幀比較去噪算法進(jìn)行實(shí)驗(yàn)。算法主要可分兩步進(jìn)行:1)將4鄰幀分成2組,兩兩取小,這樣就可以消除離子噪聲的蠕動(dòng),但同時(shí),暗噪聲也會(huì)積累變大;2)將上一步處理完的剩余2幀,取大處理,這樣暗噪聲也會(huì)得到有效抑制。該算法的具體數(shù)學(xué)表達(dá)式為

式中:Fs(i,j,k)表示處理前第k幀數(shù)字圖像信號;Fd(i,j,k)表示處理后輸出的第k幀數(shù)字圖像信號。
實(shí)驗(yàn)結(jié)果由圖2a、圖2c給出,從圖中可以看出鄰幀比較降噪算法能夠有效、有針對地去除系統(tǒng)中的噪聲,效果雖然要比16幀平均算法差,但由于采用的是1鄰幀比較降噪,因此輸出圖像只有相鄰4幀圖像產(chǎn)生關(guān)聯(lián),使得在被觀測物體運(yùn)動(dòng)時(shí),產(chǎn)生的拖影效果要優(yōu)于16幀平均圖像算法。
2.4 改進(jìn)的動(dòng)態(tài)降噪算法
前面提到,多幀平均降噪算法與鄰幀比較降噪算法是現(xiàn)如今常用且有效的兩種針對X光圖像的去噪算法。但是由于多幀平均降噪算法往往要累加較多的幀數(shù),才能有較好的效果,因此它更適合于處理靜態(tài)視頻圖像。而鄰幀比較法在1鄰幀時(shí)對圖像效果的提升比較明顯,而隨著幀數(shù)的增加效果卻沒有平均幀算法降噪效果好。基于這一系列情況,做出了一種基于動(dòng)態(tài)檢測技術(shù)智能降噪的算法。圖3給出了其算法的結(jié)構(gòu)框圖。

圖3 動(dòng)態(tài)降噪算法框圖
首先,建立一個(gè)能夠存儲(chǔ)16幀圖像的先入先出緩存隊(duì)列(FIFO),每當(dāng)一幀圖像到來,將其入隊(duì)列。同時(shí)將當(dāng)前圖像與上一幀圖像作絕對值差,得到的幀間差圖像的灰度總值再與當(dāng)前圖像灰度總值作歸一化運(yùn)算。
設(shè)定兩個(gè)歸一化閾值Y1,Y2(0<Y1<Y2<1)。當(dāng)結(jié)果位于[0,Y1]中時(shí),認(rèn)為圖像沒有發(fā)生運(yùn)動(dòng),標(biāo)記該幀圖像權(quán)重為1,當(dāng)結(jié)果位于(Y1,Y2]時(shí),認(rèn)為圖像發(fā)生緩慢運(yùn)動(dòng),標(biāo)記該幀圖像權(quán)重為0.5,當(dāng)結(jié)果大于Y2時(shí),認(rèn)為圖像發(fā)生劇烈運(yùn)動(dòng)標(biāo)記該幀圖像為權(quán)重為0。
定義n值為從新到舊圖像中,第一個(gè)權(quán)重為0的圖像前的圖像個(gè)數(shù)。即滿足Kn+1=0或者n=16,表示第n+1張圖像發(fā)生了劇烈運(yùn)動(dòng),或者緩存中16張圖像的存儲(chǔ)狀態(tài)都是靜止的或者是緩慢運(yùn)動(dòng)的。
當(dāng)動(dòng)態(tài)去噪開關(guān)打開時(shí),依次從新到舊檢測FIFO中緩存圖像的權(quán)重,如果權(quán)重為1的圖像大于等于6張,則采用基于權(quán)重的多幀平均算法輸出當(dāng)前圖像

式中:Id為輸出圖像幀;I1,I2,…,In(n≤16)為FIFO從新到舊中緩存圖像;K1,K2,…,Kn(n≤16)為權(quán)重值。如果權(quán)重為1的圖像小于6張,且n值大于等于4,則直接采用1鄰幀比較算法輸出圖像;如果權(quán)重為1的圖像小于6張,且n值小于4,判斷當(dāng)前圖像中物體正處于劇烈運(yùn)動(dòng)狀態(tài)下,將源圖像進(jìn)行3×3均值濾波輸出。
經(jīng)過多次實(shí)驗(yàn)驗(yàn)證,發(fā)現(xiàn)當(dāng)Y1=0.15,Y2=0.38時(shí),能夠有效地進(jìn)行動(dòng)態(tài)去噪而又不產(chǎn)生嚴(yán)重的拖影現(xiàn)象。
2.5 瑕疵點(diǎn)檢測與校正算法
在圖像增強(qiáng)器的生產(chǎn)過程中,由于其生氣工藝水平的限制,不可避免的會(huì)有灰塵、微小的固體顆粒等滲入其中,這些污染物會(huì)導(dǎo)致其產(chǎn)生的X光圖像在某一些區(qū)域的信息失真,呈現(xiàn)出比周圍要過亮(亮點(diǎn))或過暗的點(diǎn)(暗點(diǎn)),稱之為瑕疵點(diǎn)。
如果存在直徑超過0.5 mm的大型污染物或存在超過4個(gè)以上直徑在0.2~0.5 mm間的污染物,此圖像增強(qiáng)器已經(jīng)不符合國家標(biāo)準(zhǔn),屬于殘次品,需要報(bào)廢,不能對其進(jìn)行校正。相反,如果存在4個(gè)或4個(gè)以下直徑在0.2~0.5 mm間的污染物,此圖像增強(qiáng)器是符合國家安全標(biāo)準(zhǔn)的,可以對其采用算法進(jìn)行校正。
經(jīng)過多次試驗(yàn)證實(shí),在正常情況下,X光的空屏圖像圓中心點(diǎn)最亮,然后向四周圓邊緣勻速變暗。當(dāng)有瑕疵點(diǎn)出現(xiàn)時(shí),它與周圍的像素間變化要相對劇烈。根據(jù)這一特點(diǎn),可將瑕疵點(diǎn)檢測出來,并判斷其大小及個(gè)數(shù),為后續(xù)是否對其進(jìn)行校正做好前期工作。
研究過程中,根據(jù)這一特點(diǎn),經(jīng)過多次實(shí)驗(yàn),設(shè)計(jì)出一種瑕疵點(diǎn)校正與檢測算法如下:
首先獲取一個(gè)空屏圖像,對其圓消影內(nèi)遍歷全部像素點(diǎn),同時(shí)向內(nèi)存申請一幀圖像數(shù)組緩存,初始化為0,用于對瑕疵點(diǎn)像素坐標(biāo)的標(biāo)記。遍歷像素點(diǎn)時(shí),對于單個(gè)像素而言將其與相鄰4個(gè)像素點(diǎn)作差,如果得到的差中存在絕對值大于閾值A(chǔ),則將其對應(yīng)的坐標(biāo)點(diǎn)記錄下來,并將申請的數(shù)組緩存對應(yīng)位置1。在生成的瑕疵點(diǎn)坐標(biāo)圖像數(shù)組中,遍歷此數(shù)組,當(dāng)檢測左右、上下相鄰為01或10時(shí),將1對應(yīng)位置標(biāo)記為2,此為上述算法的誤檢測,實(shí)際為包圍瑕疵點(diǎn)的正常像素點(diǎn)。在去除誤檢測后,對瑕疵點(diǎn)坐標(biāo)圖像數(shù)組進(jìn)行連通域檢測,當(dāng)瑕疵點(diǎn)連通域內(nèi)標(biāo)記為1的像素點(diǎn)大于20個(gè)時(shí),認(rèn)為其產(chǎn)生了過大瑕疵點(diǎn),算法結(jié)束。
圖4給出了檢測算法示意圖。圖中的灰色區(qū)域?yàn)檎J(rèn)定的瑕疵點(diǎn)區(qū)域,由圖可以看出,此算法最終能夠比較準(zhǔn)確地將瑕疵點(diǎn)區(qū)別檢測出來,方便進(jìn)行下一步的校正工作。

圖4 瑕疵點(diǎn)檢測算法示意圖(A=2)
當(dāng)某個(gè)瑕疵點(diǎn)連通域內(nèi)標(biāo)記為1的像素點(diǎn)小于5個(gè)時(shí),將其都標(biāo)記為3,認(rèn)為其是無效的瑕疵點(diǎn)連通域;當(dāng)且僅當(dāng)某個(gè)瑕疵點(diǎn)連通域內(nèi)標(biāo)記為1的像素點(diǎn)大于等于5且小于20時(shí),為有效連通域。當(dāng)連通域個(gè)數(shù)大于4個(gè)時(shí),認(rèn)為過多瑕疵點(diǎn)產(chǎn)生,算法結(jié)束。
當(dāng)沒有產(chǎn)生過大瑕疵點(diǎn)和過多瑕疵點(diǎn)時(shí),輸出記錄的瑕疵點(diǎn)坐標(biāo)圖像數(shù)組。
瑕疵點(diǎn)檢測算法在開機(jī)之后只運(yùn)行一次,如果存在需要校正的瑕疵點(diǎn),圖像就要根據(jù)這個(gè)數(shù)組的內(nèi)容對瑕疵點(diǎn)進(jìn)行校正。
首先,在獲取到有效的瑕疵點(diǎn)坐標(biāo)圖像數(shù)組時(shí),依次對每個(gè)標(biāo)記為1的有效瑕疵點(diǎn)像素,檢測其上下左右,直到找到相鄰的標(biāo)記為2的正常像素點(diǎn),按照式(3)計(jì)算該點(diǎn)的估算值。

有了上述步驟后,當(dāng)視頻圖像正常進(jìn)入時(shí),如果開啟了瑕疵點(diǎn)修復(fù)開關(guān),則每次檢測瑕疵點(diǎn)坐標(biāo)圖像數(shù)組,如其值標(biāo)記為1,則該像素乘以對應(yīng)的校正系數(shù)后輸出。
圖5給出了本文所研究實(shí)現(xiàn)的X光機(jī)數(shù)字圖像增強(qiáng)器樣機(jī)。
圖5 X光機(jī)數(shù)字圖像增強(qiáng)器樣機(jī)
3 結(jié)論
為了實(shí)現(xiàn)開發(fā)具有自主知識(shí)產(chǎn)權(quán)的X光機(jī)數(shù)字圖像增強(qiáng)器,本文提出了一種基于自動(dòng)檢測的動(dòng)態(tài)降噪算法與瑕疵點(diǎn)校正算法,并在自行設(shè)計(jì)的X光機(jī)數(shù)字圖像增強(qiáng)器樣機(jī)上實(shí)現(xiàn),修正了瑕疵點(diǎn),提高了信噪比,滿足了用戶的需要。本文的工作也為真三維醫(yī)學(xué)影像的生成做了鋪墊。
[1]趙妮.基于X射線技術(shù)的電路設(shè)計(jì)[J].核電子學(xué)與探測技術(shù),2011,31(7):779-782.
[2]杜昆.基于DSP的X光機(jī)智能控制系統(tǒng)[D].合肥:安徽理工大學(xué),2009.
[3]NXP SAA7113H data sheet[EB/OL].[2012-01-27].http://www.nxp.com/documents/data_sheet/SAA7113H.pdf.
[4]Analog devices ADV7160 data sheet[EB/OL].[2012-01-27].http://www.analog.com/static/imported-files/data_sheets/ADV7160_7162.pdf.
[5]陶增,王鵬.基于TMS320C6000 DSP的嵌入式系統(tǒng)中引導(dǎo)方法的研究[J].計(jì)算機(jī)與數(shù)字工程,2005,33(7):27-31.
[6]TMS320DM6437 digital media processor[EB/OL].[2012-01-27].http://www.ti.com/lit/ds/sprs345d/sprs345d.pdf.
[7]TMS320C64x to TMS320C64x+CPU Migration Guide[EB/OL].[2012-01-27].http://www.ti.com/lit/an/spraa84a/spraa84a.pdf.
[8]HOU Qing,LI Wei.An improved enhancement self-daptive algorithm for X-ray digital image based on wavelet decomposition[C]//Proc.2010 3rd International Congress on CISP.[S.l.]:IEEE Press,2010,3:1041-1044.
[9]KASAP S O,ROWLANDS J A.Direct-conversion flat-panel X-ray image sensors for digital radiography[J].Proceedings of the IEEE,2002,90(4):591-604.
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
