低壓電力線載波通信組網(wǎng)的研究
2012-02-03 08:46:12呂玄兵
自動化儀表 2012年8期
關(guān)鍵詞:質(zhì)量
呂玄兵 王 翥 王 玲
(哈爾濱工業(yè)大學(威海)信息科學與工程學院,山東 威海 264209)
低壓電力線載波通信組網(wǎng)的研究
呂玄兵 王 翥 王 玲
(哈爾濱工業(yè)大學(威海)信息科學與工程學院,山東 威海 264209)
為改善目前低壓電力線載波通信在實際應用中通信距離短、通信效果差的現(xiàn)狀,給出了一種動態(tài)組網(wǎng)方法。首先通過網(wǎng)絡(luò)初始化過程獲取終端之間的通信質(zhì)量;然后以通信質(zhì)量為依據(jù),分別采用Dijstra和粒子群算法兩種優(yōu)化算法選取中繼節(jié)點,獲取集中器與通信終端之間的最佳通信路徑,并對這兩種算法進行對比分析;最后對該組網(wǎng)方法進行了實際測試。測試結(jié)果證實該組網(wǎng)方法是可行的,改善了系統(tǒng)的通信效果。
電力線載波 動態(tài)組網(wǎng) Dijstra 粒子群 中繼節(jié)點 通信質(zhì)量
0 引言
由于低壓電力線載波通信利用已有的電力線作為傳輸媒介,無需另建通信線路,所以其應用非常廣泛。但電力線信道不是用于通信的專用信道,載波信號傳輸時受電網(wǎng)情況的影響導致通信終端之間的通信距離和通信質(zhì)量不穩(wěn)定。單從物理層的研究來改善通信質(zhì)量不僅難度大而且代價高,因此,國內(nèi)有人在低壓電力線載波通信系統(tǒng)中設(shè)置固定的中繼節(jié)點來擴大通信范圍,提高通信質(zhì)量[1]。這種方法在一定程度上改善了通信效果,但由于受電力線信道情況的影響,通信終端之間的通信質(zhì)量帶有一定的時變性,所以設(shè)置固定的中繼節(jié)點不能真正滿足實際的要求。本文采用動態(tài)組網(wǎng)的方法,根據(jù)終端之間的通信質(zhì)量動態(tài)選擇中繼節(jié)點,提高了系統(tǒng)的通信效果。
1 低壓電力線通信組網(wǎng)背景
目前,低壓電力線載波通信系統(tǒng)的構(gòu)成如圖1所示。集中器既能與分布在三相電力線上的通信終端通過低壓電力線進行通信,又能與上位機通過串口、GPRS或者以太網(wǎng)等方式進行通信,低壓電力線載波通信終端與集中器通過低壓電力線進行通信,同時通信終端之間也能夠通過低壓電力線進行點對點通信。在目前的應用中,如遠程路燈控制、自動抄表等,跨相通信的可能性不大,所以系統(tǒng)的物理結(jié)構(gòu)決定了系統(tǒng)的網(wǎng)絡(luò)結(jié)構(gòu)應該是一個有三個分支的星型網(wǎng)絡(luò),每一個分支對應一相電力線上的通信終端,系統(tǒng)的組網(wǎng)可以看成是對三個分支上的通信終端分別進行組網(wǎng)。為適應動態(tài)組網(wǎng)的要求,每個通信終端分配一個唯一的ID號。
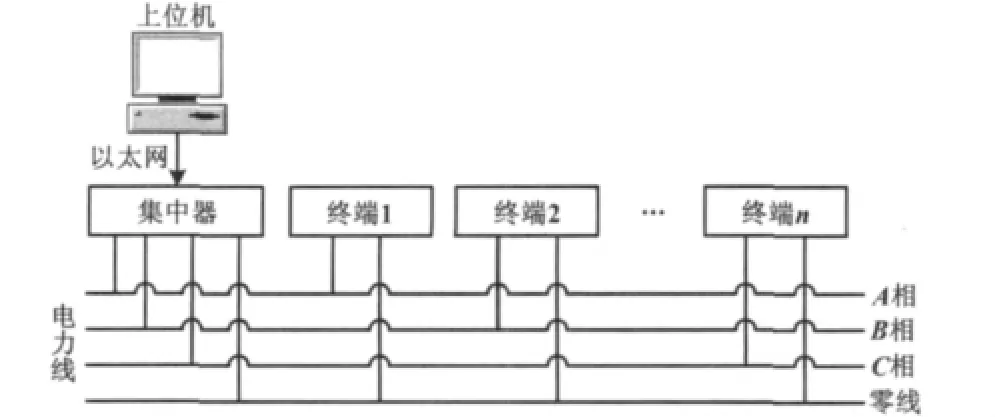
圖1 低壓電力線載波通信系統(tǒng)Fig.1 The low voltage power line carrier communication system
2 動態(tài)組網(wǎng)過程
動態(tài)組網(wǎng)就是系統(tǒng)本身能夠根據(jù)終端通信質(zhì)量動態(tài)地對網(wǎng)絡(luò)進行重構(gòu)和優(yōu)化。方案整體上分為以下兩個步驟。
①網(wǎng)絡(luò)的初始化,系統(tǒng)剛開始工作時,所有的終端對于控制中心來說都是盲點[2],控制中心需通過集中器對各個終端進行搜索和測試來獲取終端之間的通信質(zhì)量,建立一個網(wǎng)絡(luò)信息表。
②組網(wǎng)過程,在已知網(wǎng)絡(luò)信息表的基礎(chǔ)上,通過某種算法獲取集中器到各個通信終端之間的最佳通信路徑,上位機通過集中器向下發(fā)送指令時,將中繼節(jié)點的ID號包含在指令中,經(jīng)過轉(zhuǎn)發(fā)即可準確傳輸?shù)侥繕私K端。
2.1 網(wǎng)絡(luò)初始化
在實際應用中,集中器與PC機之間的通信比較穩(wěn)定,但很多通信終端不能直接通過集中器與上位機進行通信。所以上位機要通過集中器對所有的通信終端逐個搜索,并測試終端之間的通信質(zhì)量。
假設(shè)上位機通過集中器進行第一次搜索時只搜索到A1、A2、A3三個通信終端,上位機會在搜索過程中測試出集中器與A1、A2、A3之間的通信質(zhì)量。同理,當上位機通過A1、A2、A3發(fā)起第二次搜索過程時,會測試出A1、A2、A3這三個通信終端與其他通信終端之間的通信質(zhì)量。
為避免信道的沖突,在搜索和測試過程中要根據(jù)終端的ID號依次進行一定的延時。實際應用中通信終端接收以及反饋數(shù)據(jù)的時間間隔很短,通信質(zhì)量基本上不發(fā)生變化,所以認為終端的上行通信和下行通信的通信質(zhì)量是一樣的。
假設(shè)整個系統(tǒng)中有(N-1)個通信終端,加上集中器,上位機可以建立一個(N×N)的矩陣Q,Q(i,j)表示終端i與終端j之間的通信質(zhì)量。
Q 定義為[3]:

式中:T為通信時間,T的大小可以通過終端收發(fā)指令的時間間隔確定;W為誤碼率,W的大小通過對同一組數(shù)據(jù)收發(fā)來判定;M為負載數(shù)量,初始化過程中M的大小無法判斷,M的初始值統(tǒng)一為1;α、β為兩個參數(shù),在不同的應用環(huán)境下(如通信終端數(shù)的不同、電網(wǎng)環(huán)境的不同)設(shè)定不同的值,用于調(diào)整通信時間、誤碼率和負載數(shù)量對通信質(zhì)量的影響程度。
獲取Q值后,為了減少系統(tǒng)的運算量,根據(jù)Q值的大小將通信質(zhì)量劃分為6個等級,即g={1,2,3,4,5,6},g( i,j)表示終端 i與終端 j之間的通信質(zhì)量等級。由Q的定義可知,Q值越大通信質(zhì)量越差,通信質(zhì)量等級越低,即g=1時通信質(zhì)量最好。初始化過程結(jié)束后,可以得到元素為g( i,j)的矩陣G(N×N),將G定義為網(wǎng)絡(luò)信息表。
2.2 Dijstra算法的應用研究
Dijstra算法是典型的單源最短路徑算法,用于計算一個節(jié)點到其他所有節(jié)點的最短路徑[4]。將集中器視為定點S,需要進行通信的節(jié)點為N,假設(shè)S與N通信需經(jīng)過的中繼節(jié)點為:

利用Dijstra算法時,將其衡量標準變?yōu)榻K端之間通信等級之和為D,D( i,j)表示節(jié)點i和節(jié)點j之間通信時分支路徑的通信質(zhì)量等級之和,則集中器與終端N之間的最優(yōu)通信路徑即為:

集中器與終端N之間的最佳路徑即D( S,N)取最小值時的路徑。
Dijstra算法流程如下[5]。

則v( s,t)就是t到s的最佳通信路徑。
③ 令 A=A∪{t},B=B-{t}。
④ 若B=φ,算法結(jié)束,否則轉(zhuǎn)步驟⑤。
⑤ 對與 t相鄰接的所有節(jié)點 x,如果 v(s,x)≤v( s,t)+v( t,x)直接轉(zhuǎn)步驟②;否則令 v( s,x)=v( s,t)+v( t,x),轉(zhuǎn)步驟②。
由于仿真時無法實時反映電力線信道變化對通信終端的影響,因此取兩個實際終端進行測試。根據(jù)測試結(jié)果,可以認為它們之間的通信質(zhì)量在不同距離、一定范圍內(nèi)變化,如表1所示。
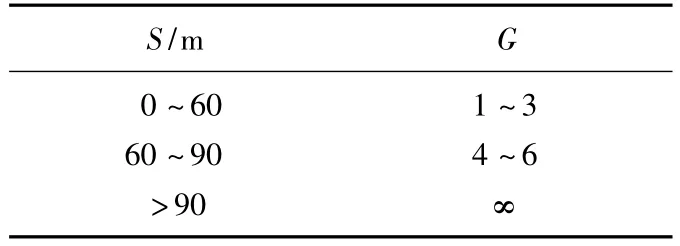
表1 通信質(zhì)量的設(shè)定Tab.1 Communication quality settings
仿真時運用Matlab軟件。設(shè)有41個通信終端,對其按N1~N41進行編號,集中器為N0。隨意分布節(jié)點位置,仿真時得到的集中器N0與終端N41通信時的最佳路徑如圖2所示。
圖2中的各個圓圈表示各個通信節(jié)點。由圖2可以看出,N5、N14、N27、N36為求得的 N0與 N41之間通信路徑的中繼節(jié)點。
根據(jù)得到的網(wǎng)絡(luò)信息表分析,在該路徑中,D( N0,N )
41的值最小,即通信效果最好。
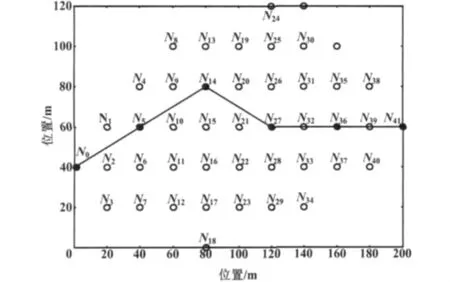
圖2 集中器N0與終端N41之間的優(yōu)化路徑Fig.2 The optimal path between N0and N41
2.3 粒子群算法的應用研究
Dijstra算法逐次對比的運算思想往往使其得到的結(jié)果是最優(yōu)的,其缺點是運算量比較大。因此,本文對粒子群算法也進行了研究。在與Dijstra算法相同的條件下,對粒子群算法進行仿真,得到對通信終端N41的尋優(yōu)結(jié)果如圖3所示。
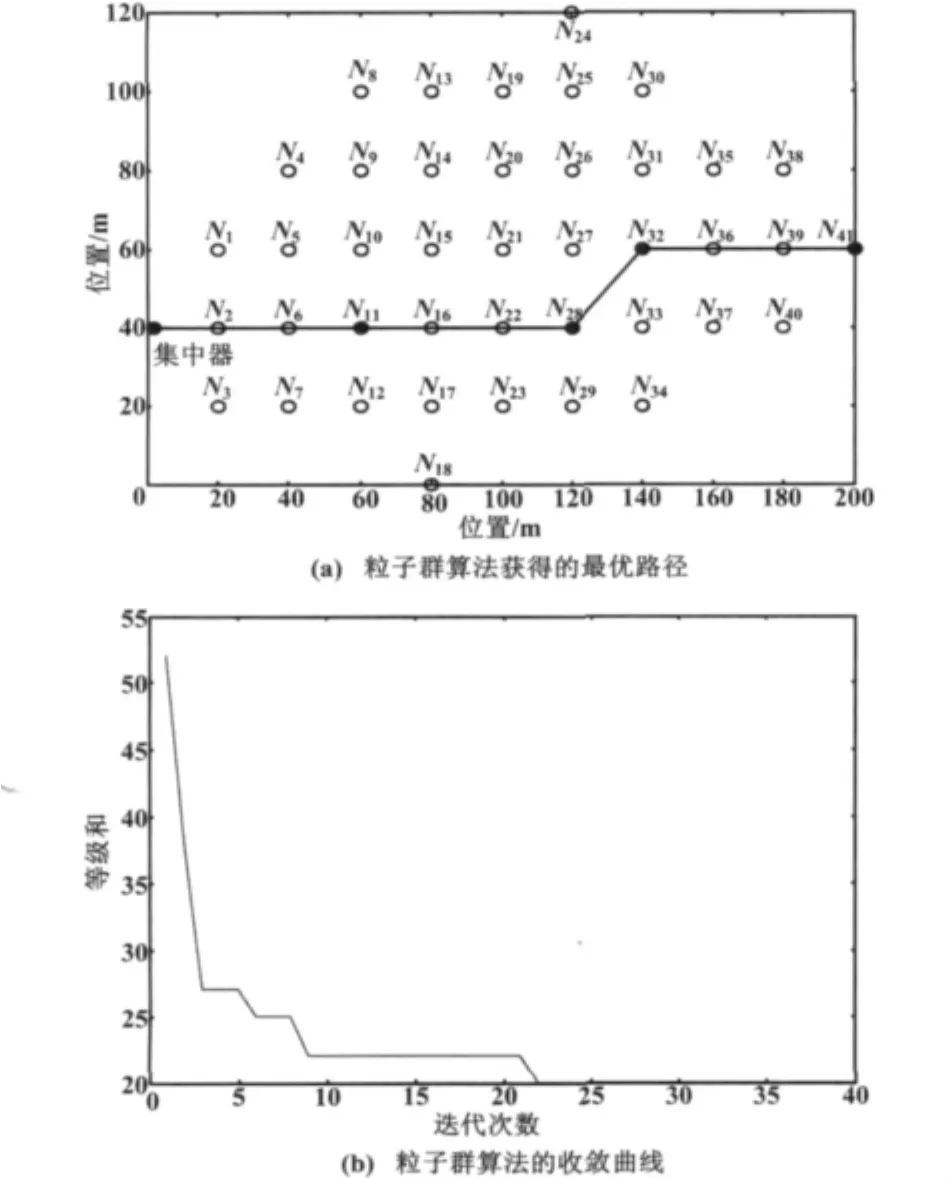
圖3 尋優(yōu)結(jié)果及運行收斂曲線Fig.3 The optimal result and running convergence curves
粒子群算法是一種群體智能優(yōu)化算法。它將每個優(yōu)化問題的解視為一個有位置和速度但沒有質(zhì)量的粒子。粒子在運動過程中記錄自己的飛行歷史最優(yōu)值以及群體歷史最優(yōu)值,并結(jié)合這兩個值對自身的速度和位置進行更新,反復迭代得到一個優(yōu)化解[6]。粒子群算法運行流程如下:
①粒子初始化,首先賦予每個粒子一個隨機解;②粒子自身進行更新;
③粒子個體分別與其個體歷史最優(yōu)值和其群體歷史最優(yōu)值進行交換更新[7];
④判斷是否達到最大迭代次數(shù)或求得的結(jié)果是否滿足要求,若是則結(jié)束,否則返回步驟②。
應用粒子群算法時,可以將集中器與目的通信終端之間的通信路徑看成一個離散序列,序列由集中器、中繼終端、目的終端的ID號按順序組成。
集中器與每個通信終端之間有很多條通信路徑,即有很多離散序列,將每一個序列看成是一個粒子,即每個粒子對應一個解。
粒子在運動過程中將其對應的解與其個體歷史最優(yōu)值和群體歷史最優(yōu)值對應的解進行對比,根據(jù)差距的大小與個體歷史最優(yōu)值和群體歷史最優(yōu)值交換中繼節(jié)點[8]。
2.4 兩種算法的對比
在實際應用中,不僅要考慮到通信質(zhì)量的問題,還要對組網(wǎng)時間進行考慮。本文研究了兩種算法,在同樣的條件下對它們的運行時間和通信質(zhì)量進行仿真對比。
以通信終端N41為例,仿真對比圖如圖4所示。
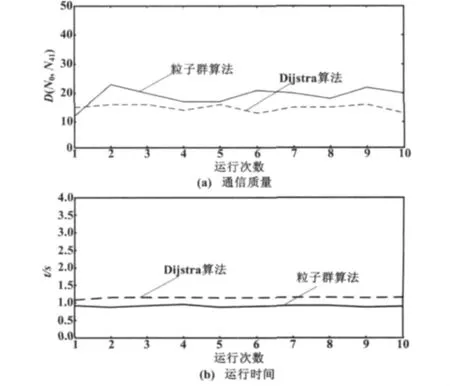
圖4 兩種算法的對比曲線Fig.4 The comparison curves of two algorithms
由圖4可知,采用Dijstra算法進行尋優(yōu)時通信質(zhì)量較好,但是其運行時間明顯比粒子群算法要長。所以在實際應用中,當系統(tǒng)中通信終端的數(shù)量較少時,可以選擇Dijstra算法,但在通信終端數(shù)量較多且對通信的實時性要求較高時,可以采用粒子群算法。
3 組網(wǎng)方法的實際測試
為了驗證文中提出的組網(wǎng)方法的可行性,本文選用實際通信終端進行了測試。
3.1 負載均衡性的研究
在實際應用中,由于通信終端所處的位置不同,靠近集中器的一些終端的通信質(zhì)量可能一直比較穩(wěn)定,致使系統(tǒng)運行時這些終端作為中繼節(jié)點的次數(shù)明顯偏多。由于電力線通信是單信道傳輸,若某一終端作為中繼的次數(shù)過多,會導致通信延時較長并影響終端使用壽命[9]。
為使中繼節(jié)點不過于集中在某些終端,在系統(tǒng)運行中對作為中繼的終端進行記錄,從而對通信質(zhì)量Q中的系數(shù)β進行合理的調(diào)整。
3.2 系統(tǒng)的測試
實際的測試系統(tǒng)如圖5所示。圖5(a)為所有終端距離集中器30 m范圍內(nèi)測試時上位機生成的網(wǎng)絡(luò)拓撲圖,圖5(b)為所有的終端分布在距離集中器70 m范圍內(nèi)的測試結(jié)果。
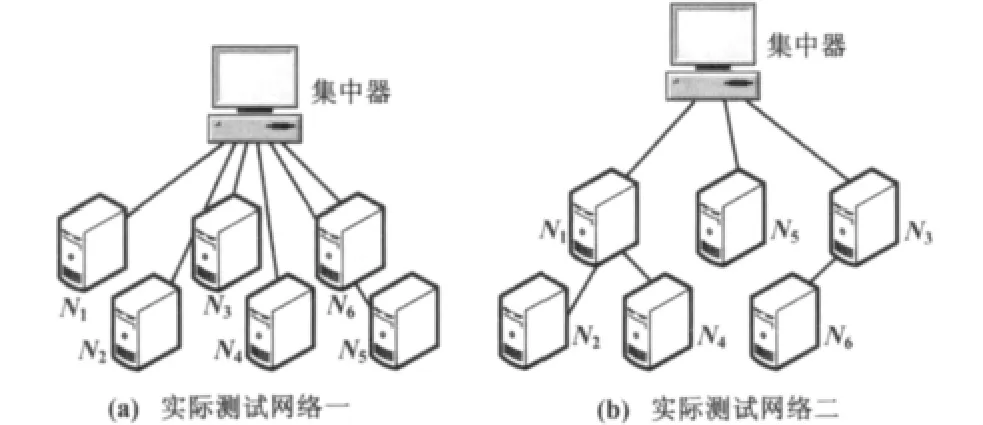
圖5 實際測試網(wǎng)絡(luò)Fig.5 The practical test network
集中器是系統(tǒng)的通信樞紐,每個通信終端能夠按照上位機的指令測試其與其他通信終端之間進行通信時的通信質(zhì)量。組網(wǎng)方法主要由上位機完成。上位機通過網(wǎng)絡(luò)初始化建立網(wǎng)絡(luò)信息表之后,將其轉(zhuǎn)化為等級矩陣G,進而采用優(yōu)化算法獲取優(yōu)化通信路徑。上位機采用VC軟件編寫,其運行流程整體如下[10]。
①初始化集中器,開始搜索和測試通信終端。
②若搜索到所有終端,則進入步驟③;否則反饋有問題的終端,然后進入步驟③。
③等待用戶指令,若收到通信指令,根據(jù)建立的網(wǎng)絡(luò)信息表,利用尋優(yōu)算法尋找最佳通信路徑。
④判斷獲取的中繼節(jié)點是否存在超載情況,若超載,則調(diào)整參數(shù)重新生成G;否則按此路徑進行通信。
⑤發(fā)出通信指令后等待反饋,若收到反饋則結(jié)束;否則返回步驟②重新組網(wǎng)。
由于終端數(shù)量只有6個,因此采用Dijstra算法較為合適。測試過程中通過改變通信終端的分布范圍來體現(xiàn)組網(wǎng)方法的動態(tài)優(yōu)化功能。
由圖5所示兩個網(wǎng)絡(luò)結(jié)構(gòu)拓撲圖可以看出,隨著通信終端之間通信質(zhì)量的變化,系統(tǒng)能夠改變集中器與通信終端之間的通信路徑,以獲取更好的通信效果。
根據(jù)70 m范圍通信時生成的通信終端之間的通信質(zhì)量等級計算證實,圖5(b)所示的集中器與終端N2、N4、N6之間的通信路徑效果最好。這也證明了本文給出的組網(wǎng)方法是可行的,很好地改善了系統(tǒng)的通信效果。
4 結(jié)束語
本文給出了一種低壓電力線載波通信系統(tǒng)動態(tài)組網(wǎng)的方案,分析了網(wǎng)絡(luò)初始化過程,對網(wǎng)絡(luò)尋優(yōu)過程中采用的優(yōu)化算法進行了仿真對比。測試結(jié)果證實該方法很好地改善了系統(tǒng)的通信效果,對提高目前低壓電力線載波系統(tǒng)的通信質(zhì)量以及擴大系統(tǒng)的通信范圍具有重要意義。
[1]劉柱,汪曉巖,蔡世龍.低壓電力線載波通信組網(wǎng)方法[J].電力系統(tǒng)通信,2009,30(206):17-20.
[2] Qi Jiajin,Liu Xiaosheng,Wu Di,et al.Study on power line communication routing method for low-voltage distribution[J].Chinese Journal of Electronic Devices,2008,31(3):1303-1308.
[3]戚佳金,徐殿國,周巖,等.低壓電力線載波通信網(wǎng)絡(luò)特性模型與組網(wǎng)算法[J].中國電機工程學報,2009,29(16):59-62.
[4]安紅巖,胡光岷,何永富.網(wǎng)絡(luò)最短路徑的動態(tài)算法[J].計算機工程與應用,2003,39(1):173-175.
[5]管志忠,劉永明.圖論中最短路問題的MATLAB程序?qū)崿F(xiàn)[J].安慶師范學院學報,2007,13(1):26-29.
[6]黃少榮.粒子群優(yōu)化算法綜述[J].計算機工程與設(shè)計,2009,30(8):1977-1980.
[7]黃嵐,王康平,周春光,等.粒子群優(yōu)化算法求解旅行商問題[J].吉林大學學報,2003,41(4):477-480.
[8]孫湘,周大偉,張希望.慣性權(quán)重粒子群算法模型收斂性分析及參數(shù)選擇[J].計算機工程與設(shè)計,2010,31(18):4068-4071.
[9] Zhao Lei,Zhu Hongsong,Xu Yongjun,et al.A load balanced and energy-efficient geographic routing for lossy W-SN[C]∥2007 International Conference on Intelligent Sensors,Sensor Networks and Information Processing,2007:119-124.
[10]Wang Zhenchao,Zhang Ye,Zhao Yuqian.A distributed routing algorithm for L-PLC network[C]∥ Proceedings of the IEEE International Conference on Automation and Logistics,Qingdao,2008.
Study on the Carrier Communication Networking for Low Voltage Power Lines
At present,the practical application of low voltage power line carrier communication only offers short communication distance and poor communication quality,to improve such condition;the dynamic networking method is proposed.With this method,firstly,the communication quality between terminals is obtained through the initialization process of network;then according to the communication quality,the Dijstra algorithm and the particle swarm optimization algorithm are separately used to select the relay nodes and get the optimal communication path between concentrator and communication terminal.Two of the optimization methods are analyzed and compared,and finally this networking method is tested practically.The test result verifies that the networking method proposed is feasible and improves the communication effect of the system.
Power line carrier Dynamic networking Dijstra Particle swarm Relay node Communication quality
TN913+.6
A
修改稿收到日期:2011-05-06。
呂玄兵(1987-),男,現(xiàn)為哈爾濱工業(yè)大學(威海)控制科學與工程專業(yè)在讀碩士研究生;主要從事低壓電力線載波通信的研究。
猜你喜歡
中學生數(shù)理化·中考版(2022年10期)2022-11-10 09:37:42
中學生數(shù)理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(shè)(2018年6期)2018-04-22 03:16:54
產(chǎn)品可靠性報告(2017年7期)2017-09-05 09:49:12
中學生數(shù)理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54