一種新型三維精密工作臺的設計與應用
2012-06-01 03:22:14陳育榮王生懷
自動化儀表 2012年8期
黎 新 陳育榮 王生懷
(湖北汽車工業學院機械工程系,湖北 十堰 442002)
0 引言
隨著精密加工及測試技術的迅速發展,精密定位的問題變得至關重要[1-2]。為更深入地研究物體表面形貌的特性與功能,對形貌的測量評定已由二維發展到三維,尺度也由微米發展到納米,測量范圍由小面積向大面積發展[3]。此外,微加工、微操作、微存儲也希望有盡可能大的工作范圍,以提高裝備的功能與效率。因此,研究大量程精密定位工作臺已成為各前沿學科的當務之急。
本文所設計的精密三維位移工作臺可廣泛應用于三維表面形貌的測量與評定、精密及超精密加工和半導體光刻等領域。與傳統的二維及三維工作臺相比,該精密三維位移工作臺具有高精度和大量程等優點。它采用粗、精結合的定位機構和自帶計量系統的閉環控制系統,能夠實現垂直方向(Z方向)的大量程位移掃描和水平方向(X-Y方向)的精確定位。
1 工作臺的結構及原理
自帶計量系統的三維位移工作臺結構如圖1所示。
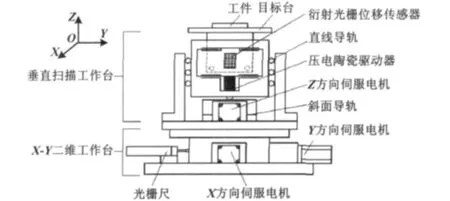
圖1 三維位移工作臺結構Fig.1 Structure of the 3D displacement workbench
由圖1可知,工作臺由垂直掃描工作臺和X-Y二維工作臺組成,其中,垂直掃描工作臺被放置在X-Y二維工作臺之上。當測量工件時,閉環控制系統控制二維工作臺的位移;同時,Z方向由伺服電機和壓電陶瓷驅動器驅動垂直掃描工作臺,以實現垂直方向上的精確定位。衍射光柵位移傳感器用于探測垂直掃描工作臺的垂直位移量。因此,在表面形貌測量過程中,實現了X-Y方向的精度定位和Z方向的垂直掃描。
1.1 垂直掃描工作臺原理
垂直掃描工作臺結構如圖2所示。
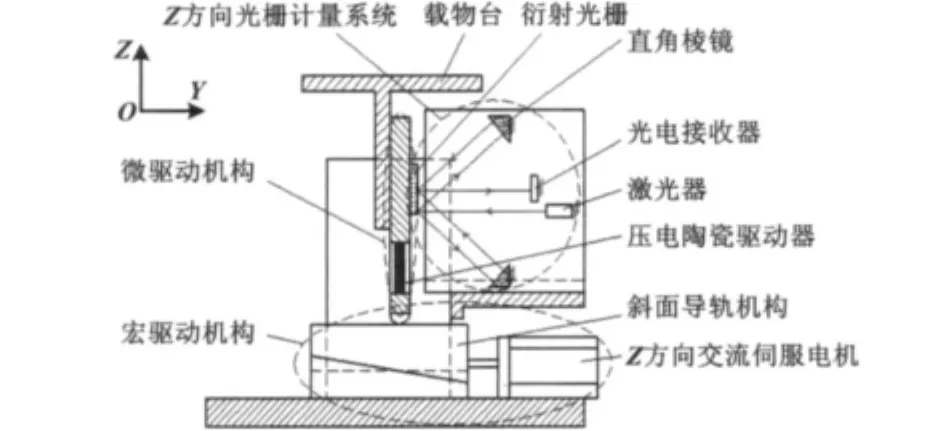
圖2 垂直掃描工作臺結構Fig.2 Structure of the vertical scanning workbench
由圖2可知,計量型垂直掃描工作臺分為粗、精兩級驅動。精驅動由壓電陶瓷驅動器執行,粗驅動由Z方向伺服電機和斜面導軌機構組成。粗、精兩級驅動機構之間安裝有精密滾動軸承,粗驅動機構能推動精驅動機構沿直線導軌在垂直方向上運動。精、粗驅動機構的組合位移量由Z方向的衍射光柵計量系統進行計量[4-5]。定位時,首先由驅動電機進行粗定位驅動,然后再驅動壓電陶瓷按一定的算法進行精確定位。
斜面導軌的斜度為1∶10,升程為10 mm;絲杠螺距為1 mm;伺服電機的輸出為10000脈沖/轉,所以垂直位移為10 nm/步。粗、精驅動的位移量均由計量衍射光柵測量系統計量。衍射光柵測量系統光學原理圖如圖3所示。
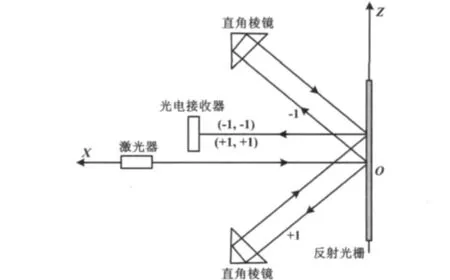
圖3 衍射光柵測量系統光學原理圖Fig.3 Optical principle of the diffraction grating measurement system
由圖3可知,激光器發出的光入射到反射光柵,經反射光柵一次衍射后形成+1級和-1級兩束衍射光,再通過置于兩側的直角棱鏡將+1級和-1級衍射光反射回光柵并匯聚于光柵上另一點;經過二次衍射后,(+1,+1)級和(-1,-1)級兩束衍射光將在垂直于X軸放置的光電探測器上形成干涉條紋。當光柵移動時,干涉條紋將發生相移,通過探測條紋的變化即可反映出物體的位移。衍射光柵測量系統采用1200線/mm的計量衍射光柵,經兩次衍射以及對信號的20細分,可達5 nm的分辨率。
1.2 X-Y二維工作臺
X-Y二維工作臺的控制系統如圖4所示。
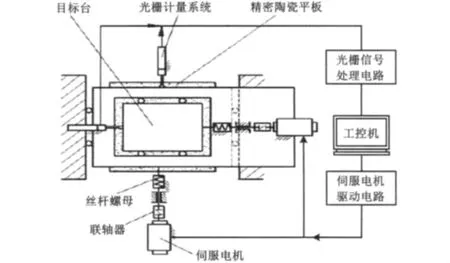
圖4 X-Y二維工作臺控制系統Fig.4 Control system of the X-Y 2D workbench
由圖4可知,X-Y二維工作臺的控制系統由目標臺、精密陶瓷平板、伺服電機、衍射光柵位移傳感器、控制電路和計算機組成[6-7]。在X-Y工作臺的X方向,伺服電機通過聯軸節帶動絲杠旋轉,驅動工作臺移動;同時,在工作臺的另一端,計量光柵接收目標臺的位移信號,由電路對計量光柵的輸出信號進行細分、辨向和計數處理。在軟件中計算出工作臺的實際位移后,將實際位移與目標位移量進行比較,采用二者之間的差值去控制步進電機的精確定位。在X-Y工作臺中,Y方向的驅動也與此相同。工作臺采用共運動基面設計,承載工件的工作臺在發生X、Y向移動時,始終貼著陶瓷精密平板上表面運動,使運動平面有較高的精度。控制系統所采用的光柵尺(光柵測微傳感器)的測量范圍為0~50 mm,柵距為20 nm,其4倍頻脈沖分辨率為 5 μm。
1.3 光柵信號處理電路
光柵信號處理電路示意圖如圖5所示。
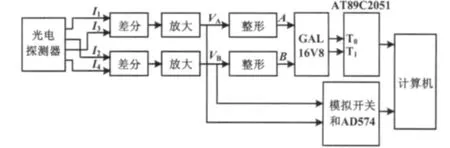
圖5 光柵信號處理電路示意圖Fig.5 Schematic diagram of the grating signal processing circuit
垂直掃描工作臺采用衍射光柵位移傳感器,二維工作臺采用計量光柵位移傳感器,其都基于莫爾光柵條紋原理。因此,其信號處理線路是相似的。
差分信號I1、I2與I3、I4由光電管探測器產生,經過前置放大和整形處理后變為兩路相差為90°的雙向正交方波信號A和B。一個周期方波信號對應干涉條紋交替變化一次,對方波進行計數,可實現對位置的測量。對方波進行倍頻細分,可提高測量的分辨率。由于工作臺可以在正、反兩個方向移動,所以在進行計數和細分電路設計時,要綜合考慮辨向的問題。本系統所采用的四細分辨向電路中,輸入信號為具有90°相位差的兩路方波信號,這兩路信號在一個周期內具有兩個上升沿和兩個下降沿,通過對邊沿的處理實現四細分。辨向是根據兩路方波相位的相對超前和滯后的關系作為判別依據。采用GAL16V8四細分后的分辨率為250 nm,但干涉條紋最后一個移動信號往往不足1/4個周期,故利用12位A/D芯片AD574進行轉換,再由計算機處理轉換的信號并計算獲得干涉條紋信號的瞬時相位θ。根據計數值N和瞬時相位角θ,即可得到工作臺的垂直位移為
2 工作臺的應用及試驗結果
課題組已成功將該精密三維位移工作臺應用于三維表面形貌的測量與評定中,取得了良好的測量效果。傳統的輪廓儀存在測量精度及量程有限等缺點,而使用精密三維位移工作臺的三維表面形貌測量儀,在測量量程增大時仍能獲得較高的測量精度,并有效地減小了測量力[9-10]。
采用接觸式測頭和非接觸式測頭,分別對中國計量科學院檢定的標準表面粗糙度多刻線樣板進行測量,三種不同樣板的測量數據結果如表1所示。
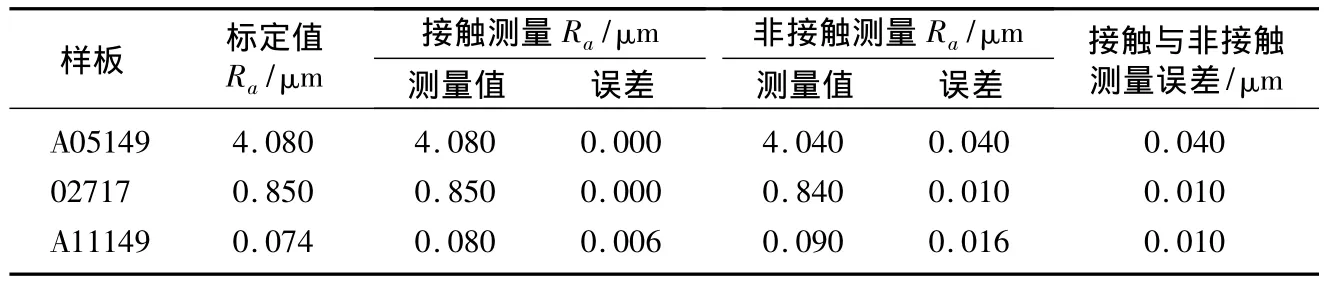
表1 不同樣板測量數據Tab.1 Measurement data of different models
對于樣板A05149儀器精度,測試其中一次的粗糙度曲線及評定結果分別如圖6和表2所示。
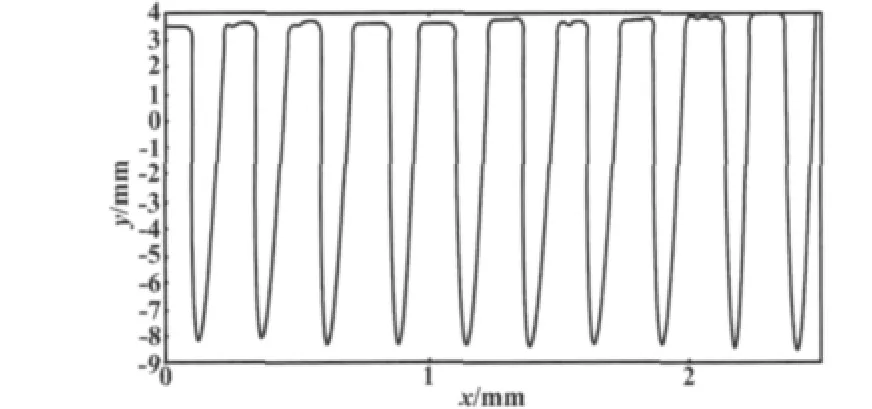
圖6 樣板A05149的粗糙度曲線Fig.6 Roughness curve of model A05149

表2 樣板A05149粗糙度評定結果Tab.2 Evaluation results of model A05149 roughness
其中,樣板的標準值為Ra=4.08 μm,測得值的相對誤差為0.19%。在同一位置反復測量5次后的結果表明,其示值誤差范圍為2%、示值變動性<2%。此外,用儀器對各種銅、鋁、鋼工件的表面進行了測量,均取得了滿意的結果。
3 結束語
基于垂直掃描的三維精密工作臺由一個自帶計量系統的二維工作臺和垂直掃描工作臺組成,具有高精度和大量程等優點。垂直掃描工作臺采用伺服電機和壓電陶瓷驅動器來實現精確定位,目標臺和衍射光柵連接,衍射光柵放置在工作臺的下方記錄位移;對于二維工作臺,目標臺和陶瓷精密平板緊緊相連,以確保運動平穩性。自帶計量系統的三維精密工作臺可應用于經過改進的接觸/非接觸三維表面形貌測量儀。
[1]Holmes M,Hocken R,Trumper D.The long range scanning stage:a novel platform for scanned probe microscopy[J].Precision Engineering,2000,24(3):191 -209.
[2]Holmes M L,Trumper D.Magnetic fluid bearing stage for atomic scale motion control[J].Precision Engineering,1996,18(1):38 -49.
[3]Dong W P,Sullivan P J,Stout K J.Comprehensive study of parameters for characterization 3-dimensional surface topography[J].Wear,1992,159(2):161-171.
[4]Wang Xuanze,Dong Xiaohua,Guo Jun,et al.Two-dimensional displacement sensing using a cross diffraction grating scheme[J].Journal of Optics A:Pure and Applied Optics,2004,6(1):106 -111.
[5]Vilkomerson D,Lyons D,Chilipka T,et al.Diffraction-grating transducers[C]∥1997 IEEE Ultrasonics Symposium,1997:1691 -1694.
[6]廖艷春,謝鐵邦.一種計量型二維精密工作臺的研究[J].湖北工業大學學報,2005,20(5):122 -124.
[7]Wang Xuanze,Guo Jun,Xie Tiebang.Study of 2D displacement platformwith measurement standard instrument[J].Journal of Huazhong University of Science and Technology,2003,31(11):53 -54.
[8]Wang Z,Bryanston-Cross P J,Whitehouse D J.Phase difference determination by fringe pattern matching[J].Optics & Laser Technology,1996,28(6):417 -422.
[9]Groot P D E,Deck L.Surface profiling by analysis of white-light interferograms in the spatial freqency domain[J].Journal of Modern Optics,1995,42(2):389 -401.
[10]Chim S S C,Kino G S.Three-dimensional image realization in interference microscopy[J].Applied Optics,1992,31(14):2550 -2553.
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21