全功率驅(qū)動的異步風(fēng)電機組的控制策略研究
2012-02-08 09:20:34王瑞新
電力科學(xué)與工程 2012年7期
王瑞新,王 毅,孫 品
(華北電力大學(xué) 電氣與電子工程學(xué)院,河北 保定 071003)
全功率驅(qū)動的異步風(fēng)電機組的控制策略研究
王瑞新,王 毅,孫 品
(華北電力大學(xué) 電氣與電子工程學(xué)院,河北 保定 071003)
通過全功率PW M變流器并網(wǎng)的籠型異步風(fēng)力發(fā)電機組 (the Full Rated Converter Induction Generator,F(xiàn)RC-IG),以其低成本、高可靠性和易維護(hù)的特點引起了人們的關(guān)注。在分析籠型異步風(fēng)電機組數(shù)學(xué)模型的基礎(chǔ)上,對全功率PW M變流器的控制策略進(jìn)行了研究,給出了基于轉(zhuǎn)矩給定的最大功率跟蹤控制策略,通過對電磁轉(zhuǎn)矩的調(diào)節(jié)間接控制發(fā)電機轉(zhuǎn)速來跟隨最大功率曲線。網(wǎng)側(cè)變流器采用并網(wǎng)電壓控制策略,根據(jù)并網(wǎng)電壓的幅值來調(diào)節(jié)無功功率抑制電網(wǎng)電壓的波動,在保證風(fēng)電機組安全運行的同時降低了機組并網(wǎng)對電網(wǎng)的影響。仿真結(jié)果表明所采用的控制策略能很好地實現(xiàn)風(fēng)電機組的最大風(fēng)能跟蹤,降低并網(wǎng)點電壓波動。在電網(wǎng)電壓故障期間,并網(wǎng)電壓控制策略還可以有效地提高機組的低電壓穿越能力,保障風(fēng)電機組穩(wěn)定運行。
籠型異步發(fā)電機;最大功率跟蹤;風(fēng)力發(fā)電;全功率變流器
0 引言
近年來風(fēng)力發(fā)電得到了迅速發(fā)展,并且開始在電力供應(yīng)中發(fā)揮重要作用。變速恒頻風(fēng)力發(fā)電機組可以在不同的風(fēng)速下調(diào)節(jié)風(fēng)力機轉(zhuǎn)速,從而捕獲到最大風(fēng)能,相對于定速風(fēng)力發(fā)電機組在效率和可控性上具有很大優(yōu)勢[1]。目前變速恒頻風(fēng)力發(fā)電的主流機型是永磁直驅(qū)風(fēng)力發(fā)電機組和雙饋風(fēng)力發(fā)電機組[2,3]。永磁直驅(qū)風(fēng)力發(fā)電機組由永磁同步電機通過全功率變流器實現(xiàn)并網(wǎng)發(fā)電,由于風(fēng)力機直接驅(qū)動發(fā)電機,省去了增速齒輪箱,提高了機組的可靠性,并且運行維護(hù)量較小。但隨著機組容量的不斷增大以及永磁材料漲價,體積大和成本高的問題日益突出。雙饋風(fēng)電機組采用的是繞線式異步電機作為發(fā)電機,定子側(cè)直接并網(wǎng),轉(zhuǎn)子側(cè)變流器只傳遞轉(zhuǎn)差功率,相對于永磁發(fā)電機組有很大的成本優(yōu)勢。但雙饋發(fā)電機轉(zhuǎn)子側(cè)存在滑環(huán),使得維護(hù)成本大大增加,而且發(fā)電機直接與電網(wǎng)相連,故障穿越能力也不如通過全功率變流器并網(wǎng)的永磁直驅(qū)風(fēng)電機組。基于上述兩種機型的優(yōu)缺點,又提出了一種以籠型異步電機代替永磁電機的變速恒頻發(fā)電機型[4~6],將籠型異步發(fā)電機通過全功率變流器連接到電網(wǎng)實現(xiàn)并網(wǎng)發(fā)電。該機型在成本和可靠性上優(yōu)于永磁風(fēng)電機組,在并網(wǎng)控制能力和維護(hù)方面優(yōu)于雙饋機組,但需采用高速比齒輪箱和全功率變流器。
目前采用該機型的西門子SWT-3.6-107風(fēng)電機組[7]已獲得實際應(yīng)用,但對此種機型控制策略研究的文獻(xiàn)卻相對較少。文獻(xiàn) [8]提出了一種異步機通過全功率變流器并網(wǎng)的控制策略,定子側(cè)變流器采用不需要磁鏈傳感器的間接矢量控制,降低了系統(tǒng)傳感器的成本。文獻(xiàn) [9]對FRC-IG機組在電網(wǎng)電壓跌落時,通過電機電磁轉(zhuǎn)矩的調(diào)節(jié)使風(fēng)電機組安全穿越電網(wǎng)故障。文獻(xiàn) [10]將模糊控制應(yīng)用到FRC-IG風(fēng)電機組的控制系統(tǒng)中,減小參數(shù)誤差對系統(tǒng)的影響。
變速恒頻風(fēng)電機組可以在風(fēng)速變化的情況下,通過對風(fēng)力機槳葉和轉(zhuǎn)速的調(diào)節(jié),使風(fēng)力機捕獲最大風(fēng)能,運行在最大功率點上。變速恒頻風(fēng)電機組的最大功率跟蹤控制方式[11]多種多樣,對于風(fēng)電場數(shù)據(jù)不明且轉(zhuǎn)動慣量小的小型風(fēng)力發(fā)電系統(tǒng),最大功率跟蹤可以采用尋優(yōu)法[12,13]來實現(xiàn)。本文研究對象為兆瓦級風(fēng)力發(fā)電系統(tǒng),轉(zhuǎn)動慣量較大,尋優(yōu)法很難實現(xiàn)最大功率跟蹤。在以風(fēng)電場數(shù)據(jù)為依賴的控制策略中,可以通過給定的特性曲線[14~16]控制發(fā)電機來實現(xiàn)最大風(fēng)能的捕獲。最優(yōu)轉(zhuǎn)速曲線就是其中的代表,然而最優(yōu)轉(zhuǎn)速的確定不僅需要參考風(fēng)力機數(shù)據(jù),而且還需測量風(fēng)速,風(fēng)速測量誤差會使轉(zhuǎn)速偏離實際最優(yōu)值。本文采用轉(zhuǎn)矩給定的最大功率跟蹤,結(jié)合異步機的矢量控制策略,可以很好的實現(xiàn)風(fēng)電機組對最大功率的捕獲,避免了對風(fēng)速的測量,同時降低風(fēng)電場的數(shù)據(jù)誤差帶來的影響,提高最大功率跟蹤的準(zhǔn)確性。
本文主要研究基于全功率驅(qū)動的異步風(fēng)電機組的控制策略,實現(xiàn)風(fēng)電機組的最大功率跟蹤以及安全并網(wǎng)。首先對風(fēng)力機和異步機的數(shù)學(xué)模型和最大功率跟蹤原理進(jìn)行了分析,給出了一種最優(yōu)轉(zhuǎn)矩給定的最大功率跟蹤策略,通過機側(cè)變流器對異步發(fā)電機進(jìn)行矢量控制跟蹤最大風(fēng)能。網(wǎng)側(cè)變流器采用并網(wǎng)電壓控制,實現(xiàn)風(fēng)電機組安全并網(wǎng)的同時抑制電網(wǎng)電壓的波動。最后,在 Matlab仿真平臺上搭建了基于籠型異步機的風(fēng)力發(fā)電系統(tǒng)模型,對異步風(fēng)電機組控制策略的可行性以及最大功率跟蹤策略的正確性進(jìn)行了驗證,并對在電網(wǎng)電壓跌落下風(fēng)電機組的響應(yīng)做了仿真分析。
1 風(fēng)電機組結(jié)構(gòu)與數(shù)學(xué)模型
FRC-IG風(fēng)電機組拓?fù)浣Y(jié)構(gòu)如圖1所示。采用籠型異步機作為發(fā)電機,風(fēng)力機通過增速齒輪箱拖動發(fā)電機,發(fā)電機定子側(cè)通過背靠背全功率PW M變流器連接到電網(wǎng),從而實現(xiàn)風(fēng)能到電能的轉(zhuǎn)換。
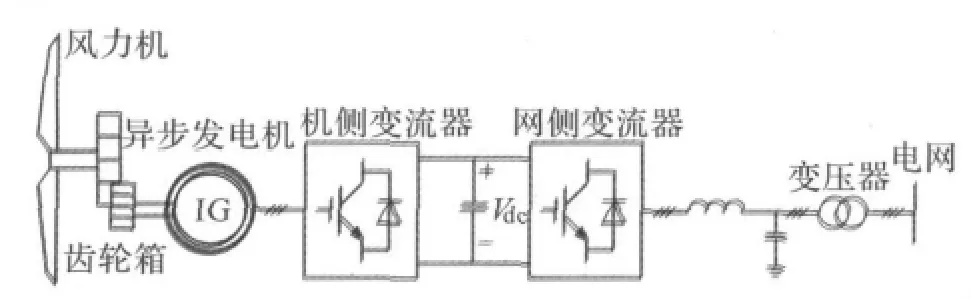
圖1 FRC-IG風(fēng)電機組拓?fù)浣Y(jié)構(gòu)Fig.1 Topology structure of FRC-IG wind turbine
在異步風(fēng)電機組中,風(fēng)力機將捕獲的風(fēng)能轉(zhuǎn)換為機械功率,通過齒輪箱輸送給異步發(fā)電機,發(fā)電機起著機械功率與電功率轉(zhuǎn)換的作用,機側(cè)變流器將發(fā)電機產(chǎn)生的有功功率輸送到直流母線環(huán)節(jié),并向異步機提供勵磁所需的無功功率。網(wǎng)側(cè)變流器穩(wěn)定直流母線環(huán)節(jié)電壓,將有功功率輸送到電網(wǎng)。
1.1 風(fēng)力機運行特性
風(fēng)力機是風(fēng)力發(fā)電系統(tǒng)中將風(fēng)能轉(zhuǎn)化為機械能的重要部分,由風(fēng)力機的空氣動力學(xué)可知,風(fēng)力機輸出的機械功率可表示為:

式中:ρ為空氣密度;Sw為風(fēng)力機葉片迎風(fēng)掃掠面積;v為風(fēng)速;Cp是風(fēng)能利用系數(shù),與槳距角β和葉尖速比λ有關(guān)。葉尖速比λ是葉尖線速度與風(fēng)速之比:

式中:Rw為風(fēng)力機葉片半徑;ωw為風(fēng)力機葉片轉(zhuǎn)速;當(dāng)槳距角不變、風(fēng)速給定的情況下,則存在一個最優(yōu)葉尖速比λopt,對應(yīng)于一個最優(yōu)轉(zhuǎn)速ωopt,使得風(fēng)力機捕獲到最大風(fēng)能。將不同風(fēng)速下的最優(yōu)轉(zhuǎn)速對應(yīng)的最大功率點連接起來即可得到最大功率追蹤曲線。
1.2 異步發(fā)電機數(shù)學(xué)模型
異步發(fā)電機是風(fēng)力發(fā)電系統(tǒng)中將風(fēng)力機輸出的機械功率轉(zhuǎn)換為電功率的重要環(huán)節(jié),而電機本質(zhì)上又是一個高階、非線性、強耦合的多變量系統(tǒng),如何實現(xiàn)對電機的高性能控制,是風(fēng)力發(fā)電系統(tǒng)實現(xiàn)最大功率跟蹤的關(guān)鍵所在。根據(jù)籠型異步電機的特點,采用適合籠型異步電機的轉(zhuǎn)子磁鏈定向的矢量控制策略,通過籠型異步電機在三相靜止坐標(biāo)系下的數(shù)學(xué)模型到兩相同步旋轉(zhuǎn)坐標(biāo)系下的變換,實現(xiàn)對電機磁鏈和轉(zhuǎn)矩的完全解耦控制。籠型異步電機在兩相同步旋轉(zhuǎn)坐標(biāo)系下的電壓方程可表示為:定、轉(zhuǎn)子磁鏈方程:
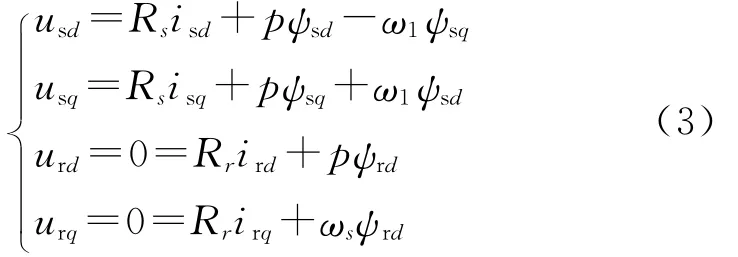
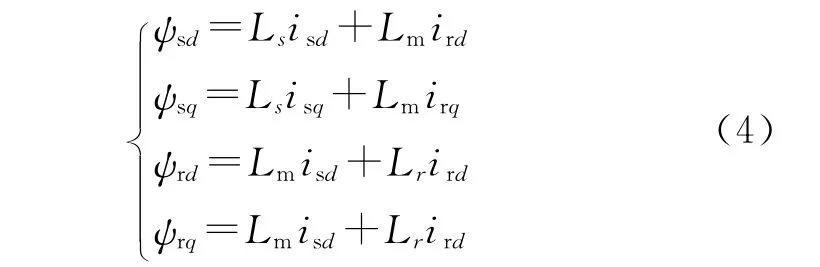
式中:ω1為兩相旋轉(zhuǎn)坐標(biāo)系旋轉(zhuǎn)電角速度;ωs為ω1與轉(zhuǎn)子電角速度ωr之差;Ls為定子電感;Lr為轉(zhuǎn)子電感;Lm為勵磁電感;p為積分算子;isd,isq為定子電流在同步旋轉(zhuǎn)坐標(biāo)系下的dq軸分量。通過對轉(zhuǎn)子磁鏈?zhǔn)噶喀譺的幅值和角度的計算,將同步旋轉(zhuǎn)坐標(biāo)d軸定向在轉(zhuǎn)子磁鏈?zhǔn)噶糠较蛏希处譺=ψrd,ψrq=0,簡化電機定、轉(zhuǎn)子磁鏈表達(dá)式,通過整理可得到在轉(zhuǎn)子磁鏈定向坐標(biāo)系下電機數(shù)學(xué)模型。

2 全功率變流器控制策略
2.1 最大功率跟蹤控制策略
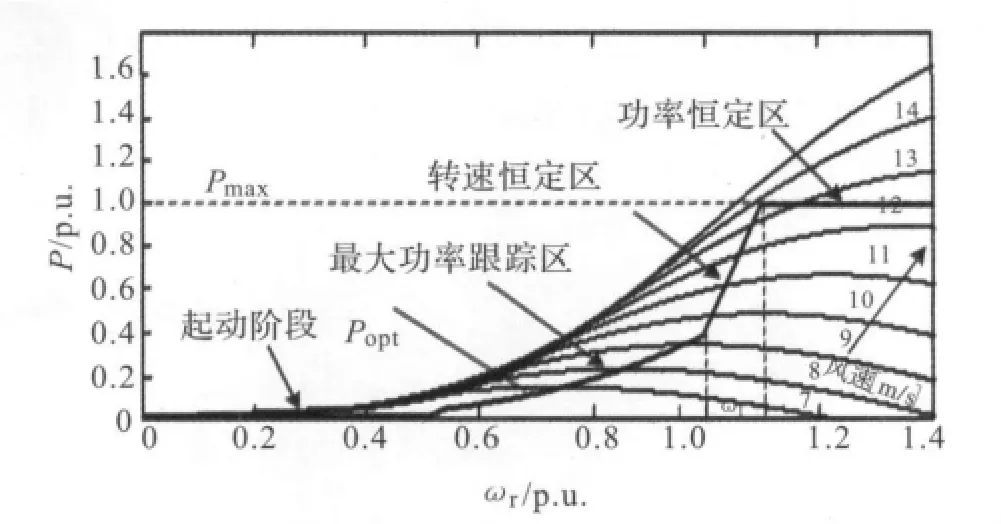
圖2 最大功率跟蹤曲線Fig.2 Maximum power tracking curve
對于特定的風(fēng)力機,其最大功率曲線是確定的。由于風(fēng)機是通過一個固定變比的增速齒輪箱與發(fā)電機轉(zhuǎn)子相連,在標(biāo)幺值系統(tǒng)中,風(fēng)機轉(zhuǎn)速與發(fā)電機轉(zhuǎn)速具有等效性。在不同的風(fēng)速下,為了保證風(fēng)力發(fā)電機組能夠安全穩(wěn)定運行,最大功率跟蹤曲線可按照圖2所示分為啟動階段、最大功率跟蹤區(qū)、轉(zhuǎn)速恒定區(qū)和功率恒定區(qū)。最大功率跟蹤區(qū)是當(dāng)風(fēng)力發(fā)電機組并入電網(wǎng)并運行在額定轉(zhuǎn)速ω1下時,為了最大限度的捕獲風(fēng)能,發(fā)電機轉(zhuǎn)速隨風(fēng)速的變化而相應(yīng)調(diào)節(jié),確保風(fēng)能利用系數(shù)Cp保持在最大值。當(dāng)發(fā)電機組轉(zhuǎn)速隨著風(fēng)速的增大達(dá)到額定轉(zhuǎn)速ω1時,發(fā)電機組將運行在轉(zhuǎn)速恒定區(qū),不再進(jìn)行最大功率跟蹤,限制轉(zhuǎn)速的增加以保護(hù)機組不受損壞。風(fēng)速的進(jìn)一步增大,發(fā)電機組的輸出功率將穩(wěn)定在功率限幅值,運行在功率恒定區(qū)。最大功率參考值P*opt可以由發(fā)電機轉(zhuǎn)速通過式 (8)給出:
式中:kopt為最大功率跟蹤曲線的比例系數(shù);ω0為風(fēng)電機組的切入轉(zhuǎn)速對應(yīng)的電角速度;ω1為進(jìn)入轉(zhuǎn)速恒定區(qū)時的電角速度;ωmax為轉(zhuǎn)速限幅值對應(yīng)的電角速度;Pmax為輸出功率限幅值。
2.2 機側(cè)變流器控制策略
與異步發(fā)電機定子側(cè)相連的變流器稱之為機側(cè)變流器,不僅需要向異步發(fā)電機提供建立磁場所需的無功功率,還要控制發(fā)電機跟蹤最大功率曲線,并將發(fā)電機產(chǎn)生的有功功率輸送到直流母線上。通過上述對異步電機在轉(zhuǎn)子磁鏈定向下的兩相旋轉(zhuǎn)坐標(biāo)系數(shù)學(xué)模型分析,對異步發(fā)電機采用轉(zhuǎn)子磁鏈定向的矢量控制策略,定子d軸電壓控制異步電機的轉(zhuǎn)子磁鏈,定子q軸電壓控制異步電機的電磁轉(zhuǎn)矩,實現(xiàn)勵磁和轉(zhuǎn)矩的解耦控制,控制電機實現(xiàn)最大功率跟蹤。機側(cè)變流器控制框圖如圖3所示。
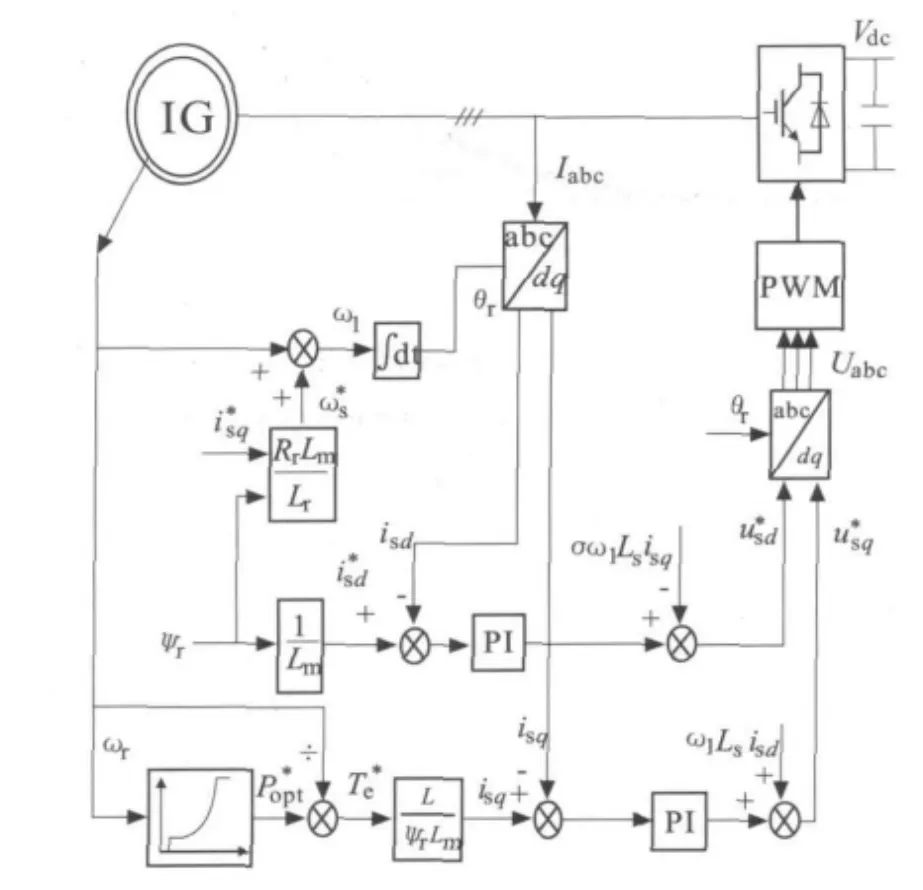
圖3 機側(cè)變流器控制框圖Fig.3 Control diagram of generator side converter
2.3 網(wǎng)側(cè)變流器控制策略
發(fā)電機產(chǎn)生的有功功率,經(jīng)機側(cè)變流器輸送到直流母線,引起直流母線電壓上升,而網(wǎng)側(cè)變流器起著穩(wěn)定直流母線電壓的作用,將直流母線上的有功功率輸送到電網(wǎng),并通過網(wǎng)側(cè)無功功率的調(diào)節(jié)來控制并網(wǎng)點電壓的波動。網(wǎng)側(cè)變流器在同步旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型可表示為:
式中:Vgd,Vgq為并網(wǎng)點電壓矢量在同步旋轉(zhuǎn)坐標(biāo)系下的dq軸分量;id,iq為電網(wǎng)電流矢量在同步旋轉(zhuǎn)坐標(biāo)系下的dq軸分量,ωg為并網(wǎng)點電壓電角速度。在坐標(biāo)變換時,將同步旋轉(zhuǎn)坐標(biāo)的d軸與并網(wǎng)點電壓矢量Vg重合,既Vgq=0。網(wǎng)側(cè)變流器有功功率和無功功率表達(dá)式為:

由式 (9)和 (10)可知,對有功電流分量id和無功電流分量iq進(jìn)行解耦控制,即可獨立調(diào)節(jié)網(wǎng)側(cè)變流器輸出的有功功率和無功功率,穩(wěn)定直流母線電壓和并網(wǎng)點電壓。網(wǎng)側(cè)變流器控制框圖如圖4所示。
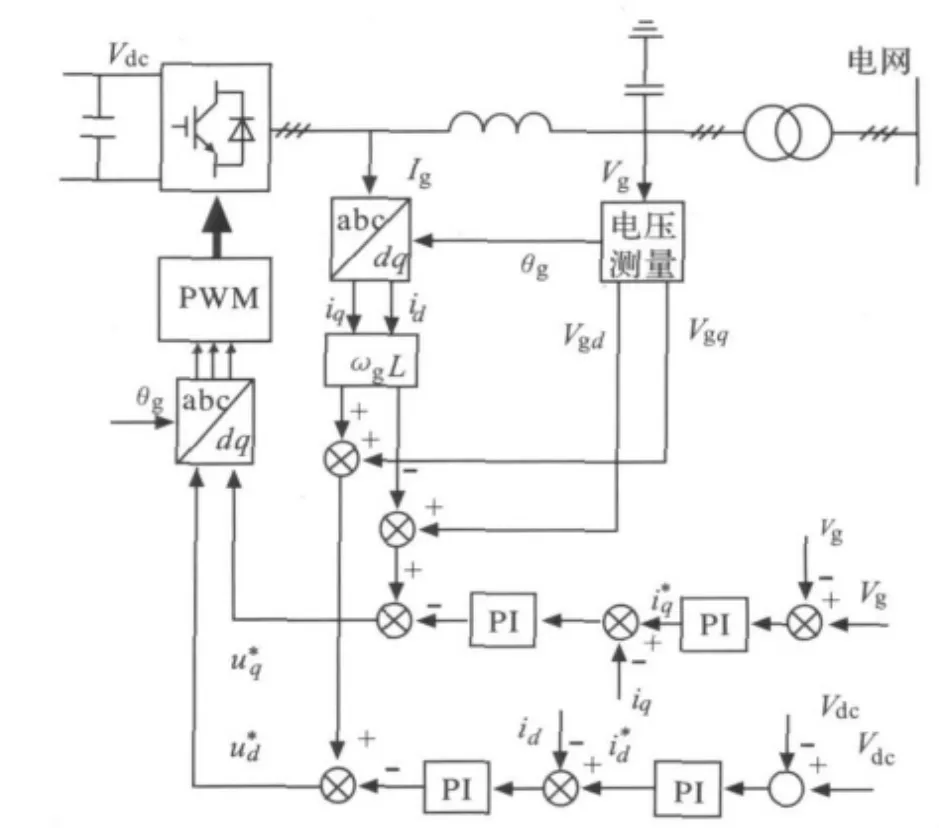
圖4 網(wǎng)側(cè)變流器控制框圖Fig.4 Control diagram of grid side converter
有功電流分量給定值i*d由直流母線電壓外環(huán)控制器得到,無功電流分量給定值i*q由并網(wǎng)點電壓外環(huán)控制器得到,并網(wǎng)點電壓和直流母線電壓的給定值都為額定值,經(jīng)過對有功電流分量和無功電流分量的閉環(huán)控制,得到輸出控制量u*d,u*q,再經(jīng)過派克逆變換和脈寬調(diào)制環(huán)節(jié),得到網(wǎng)側(cè)變流器的控制脈沖,實現(xiàn)風(fēng)電機組的并網(wǎng)控制。
3 仿真結(jié)果及分析
在 Matlab仿真平臺按圖1搭建了籠型異步機風(fēng)力發(fā)電系統(tǒng)模型,參數(shù)設(shè)置如下:電機額定線電壓有效值U=0.69 k V,額定功率P=2 MW,定子電感Ls=3.442 p.u.,轉(zhuǎn)子電感Lr=3.361 p.u.,勵磁電感Lm=3.232 p.u.,直流側(cè)電容C=50 mF。
圖5所示為隨機風(fēng)速曲線,圖6,7所示為在隨機風(fēng)速給定的情況下,風(fēng)電機組發(fā)電機轉(zhuǎn)速和并網(wǎng)有功功率的響應(yīng)曲線。根據(jù)圖2所示的最大功率跟蹤曲線,在10~30 s附近,發(fā)電機轉(zhuǎn)速跟隨風(fēng)速的變化而變化,保持風(fēng)能利用系數(shù)維持在最大值,風(fēng)電機組運行在最大功率跟蹤區(qū)。在30~38 s,風(fēng)速在13 m/s附近波動,發(fā)電機轉(zhuǎn)速達(dá)到最大值,有功功率輸出達(dá)到額定值,運行在功率恒定區(qū)。隨后風(fēng)速緩慢減少,并網(wǎng)有功功率也隨之減少,而發(fā)電機轉(zhuǎn)速維持在額定轉(zhuǎn)速附近,風(fēng)電機組運行在轉(zhuǎn)速恒定區(qū)。
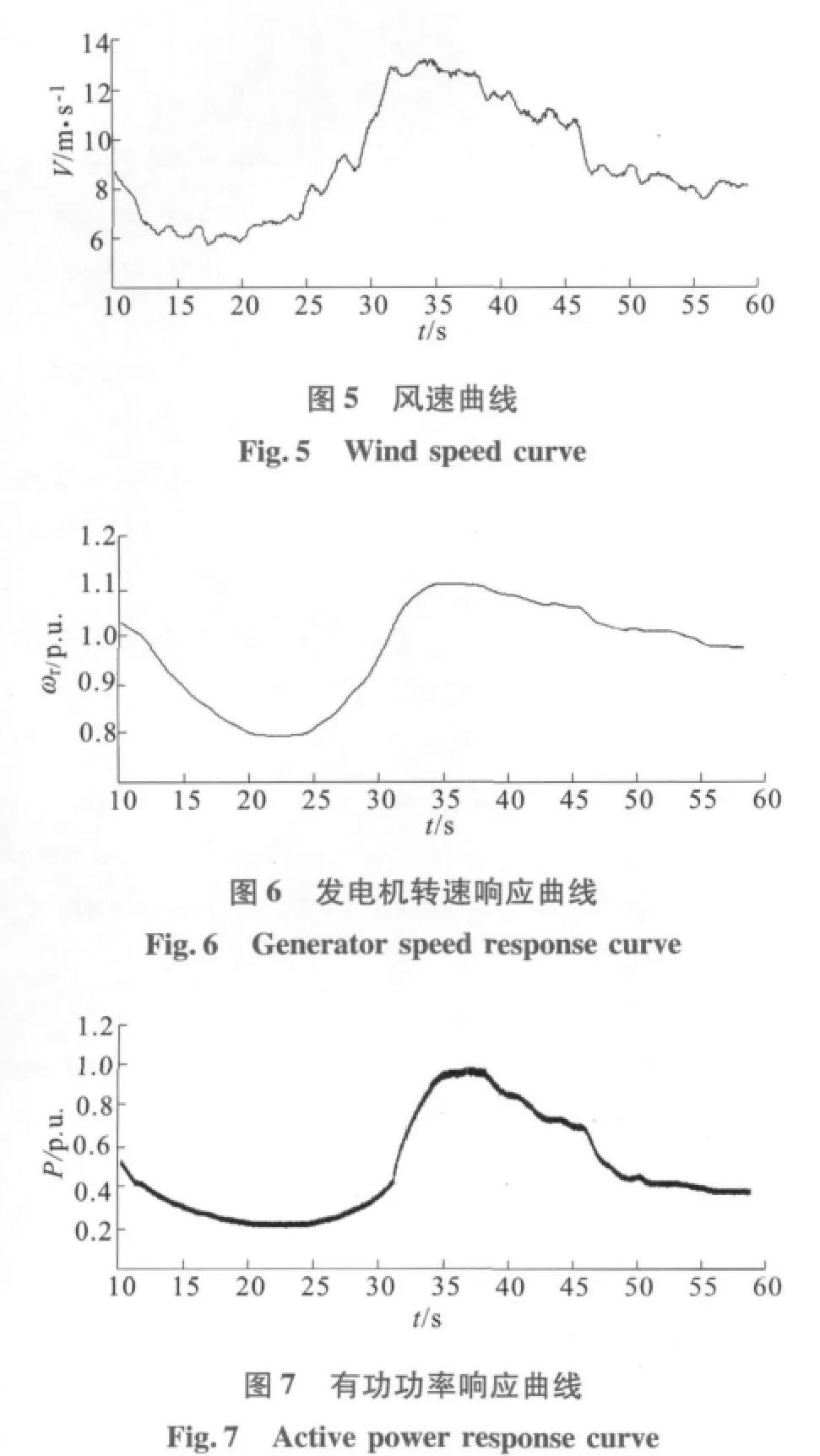
圖8,9所示為風(fēng)電機組在風(fēng)速波動的情況下,網(wǎng)側(cè)變流器采用單位功率因數(shù)控制和并網(wǎng)電壓控制下的電網(wǎng)電壓波動曲線。在網(wǎng)側(cè)變流器進(jìn)行并網(wǎng)電壓控制時,電網(wǎng)電壓可以很好地維持在額定電壓附近,抑制電網(wǎng)電壓的波動,減少風(fēng)電機組并網(wǎng)對電網(wǎng)電壓的影響。圖10所示為網(wǎng)側(cè)變流器在并網(wǎng)電壓控制下無功功率的響應(yīng)曲線。
圖11~15給出了風(fēng)力發(fā)電機組在電網(wǎng)電壓跌落故障下,網(wǎng)側(cè)變流器采用單位功率因數(shù)控制和并網(wǎng)電壓控制策略下的響應(yīng)曲線。在8 s時刻,電網(wǎng)電壓跌落到0.8 p.u.,持續(xù)0.625 s。網(wǎng)側(cè)變流器采用并網(wǎng)電壓控制并網(wǎng),在電網(wǎng)電壓跌落時通過對無功功率的調(diào)節(jié),在一定程度上提升低電壓穿越能力,降低直流側(cè)電容在電網(wǎng)故障下的電壓躍升,減少電網(wǎng)故障對風(fēng)電機組的影響。

4 結(jié)論
本文在分析全功率驅(qū)動的籠型異步風(fēng)電機組數(shù)學(xué)模型的基礎(chǔ)上,對風(fēng)電機組最大功率跟蹤和并網(wǎng)的控制策略做了仿真研究。將電動機調(diào)速使用的矢量控制技術(shù)應(yīng)用在風(fēng)力發(fā)電機上,使發(fā)電機獲得轉(zhuǎn)矩和勵磁的解耦控制能力,通過對電磁轉(zhuǎn)矩的調(diào)節(jié)實現(xiàn)風(fēng)電機組最大功率跟蹤,控制簡單、跟蹤性能好。網(wǎng)側(cè)變流器在并網(wǎng)電壓控制策略下,將不同風(fēng)速下發(fā)電機產(chǎn)生的有功功率輸送到電網(wǎng),維持直流側(cè)電壓穩(wěn)定,還可以獨立調(diào)節(jié)無功功率,根據(jù)并網(wǎng)點電壓的大小對電網(wǎng)進(jìn)行無功補償,抑制電壓波動提高風(fēng)電場的低電壓穿越能力,為風(fēng)電機組的不脫網(wǎng)運行提供保障。
[1]Rajib Datta,V.T.Ranganathan.Variable-speed wind power generation using doubly fed wound rotor induction machine—A comparison with alternative schemes [J].IEEE Transactions On Energy Conversion,2002,17(3):414-421.
[2]李晶,王偉勝,宋家驊.變速恒頻風(fēng)力發(fā)電機組建模與仿真 [J].電網(wǎng)技術(shù),2003,27 (9):14-17.
Li Jing,Wang Weisheng,Song Jiahua. Modeling and dynamic simulation of variable speed wind turbine [J].Power System Technology,2003,27 (9):14-17.
[3]尹明,李庚銀,張建成,等.直驅(qū)式永磁同步風(fēng)力發(fā)電機組建模及其控制策略 [J].電網(wǎng)技術(shù),2007,31(15):61-65.Yin Ming,Li Gengyin,Zhang Jiancheng,et al. Modeling and control strategies of directly wind turbine with permanent magnet synchronous generator [J].Power System Technology,2007,31 (15):61-65.
[4] M.Karrari,W.Rosehart,O.P. Malik.Comprehensive control strategy for a variable speed cage machine wind generation unit [J].IEEE Transations on Energy Conversion,2005,20 (2):415-423.
[5]Vladislav Akhmatov.Full-load converter connected asynchronous generators for MWclass wind turbines[J].Wind Engineering,2005,29 (4):341-351.
[6]Haejoon An,Heesang Ko,Hongwoo Kim,et al. Modeling and voltage-control of variable-speed SCAG-based wind farm [J].Renewable Energy,2012,Vol 42:28-35.
[7]SIE MENS,Wind Turbine 2009;SWT-3.6-107.Available from:http://http://www.energy.siemens.com/br/pool/hq/power-generation/wind-power/E50001-W310-A103-V5-4A00_WS_SWT-3.6-107_US.pdf.
[8]Jose Luis Domingues Garcia,Oriol Gomis Bellmunt.Indirect vector control of a squirrel cage induction generator wind turbine [J].Computer and Mathematics with Application,2012,64 (2):102-114.
[9] Marta Molinas,Bjarne Naess,William Gullvik,et al.Cage induction generators for wind turbines with power electronics converters in the light of the new grid codes[C].European Conference on Power Eletronics and Applications,2005,1-10.
[10] MG Simoes,B K Bose,R J Spiegel.Fuzzy logic based intelligent control of a variable speed cage machine wind generation system [J].IEEE Transactionson Power Electronics,1997,12 (1):87-95.
[11]陳毅東,楊育林,王立喬,等.風(fēng)力發(fā)電最大功率點跟蹤技術(shù)及仿真分析 [J].高電壓技術(shù),2010,36(5):1322-1326.
Chen Yidong,Yang Yulin,Wang liqiao,et al. Maximum power point tracking technology and simulation analysis for wind power generation [J].High Voltage Engineering,2010,36 (5):1322-1326.
[12]陳思卓,郭鵬,范曉旭.雙饋式風(fēng)力發(fā)電系統(tǒng)最大風(fēng)能跟蹤控制的研究 [J].電力科學(xué)與工程,2010,26(1):1-4.
[13]王豐收,沈傳文,孟永慶.基于 MPPT算法的風(fēng)力永磁發(fā)電系統(tǒng)的仿真研究 [J].電氣傳動,2007,37 (1):6-10.Wang Fengshou,Shen Chuanwen, Meng Yongqing.Simulating study of wind power system using the P MSG based on the MPPT method [J].Electric Drive,2007,37 (1):6-10.
[14]姚駿,廖勇,瞿興鴻,等.直驅(qū)永磁同步風(fēng)力發(fā)電機的最佳風(fēng)能跟蹤控制 [J].電網(wǎng)技術(shù),2008,32(10):11-15,27.
YaoJun,Liao Yong,Qu Xinghong,et al.Optimal wind-energy tracking control of direct-driven permanent magnet synchronous generators for wind turbines[J].Power System Technology,2008,32 (10):11-15,27.
[15]趙仁德,王永軍,張加勝.直驅(qū)式永磁同步風(fēng)力發(fā)電系統(tǒng)最大功率追蹤控制 [J].中國電機工程學(xué)報,2009,29 (27):106-111.
Zhao Rende,Wang Yongjun,Zhang Jiashen. Maximum power point tracking control of the wind energy generation system with direct-driven permanent magnet synchronous generators [J].Proceedings of the CSEE.2009,29 (27):106-111.
[16]劉其輝,賀益康,趙仁德.變速恒頻風(fēng)力發(fā)電系統(tǒng)最大風(fēng)能追蹤控制 [J].電力系統(tǒng)自動化,2003,27(20):62-67.
[17]葉杭冶.風(fēng)力發(fā)電機組的控制技術(shù) [ M].北京:機械工業(yè)出版社,2006.
[18]李永東.交流電機數(shù)字控制系統(tǒng) [ M].北京:機械工業(yè)出版社,2002.
Research on Control Strategy of Induction Generator Wind Turbine Drived by Full Rated Converter
Wang Ruixin,Wang Yi,Sun Pin
(School of Electrical and Electronic Engineering,North China Electric Power University,Baoding 071003,China)
Squirrel-cage induction wind turbines connecting the grid with the full rated PW Mconverter attracted people's attention because of the characteristics of low cost,good reliability and easy to maintain.This paper studied the control strategy of the full rated PW Mconverter based on the analysis of squirrel-cage induction wind turbine mathematical model,presented the strategy of maximum wind energy tracking control by the referenced torque,controlling the generator speed to follow the maximum power curve indirectly through the regulation of the electromagnetic torque.The grid side converter use grid voltage control strategy to suppress the fluctuation of grid voltage by adjusting the reactive power according to the voltage amplitude,reduce the impact to the grid and ensure the safe operation of wind turbine.Simulation results show that the control strategy can be used effectively to achieve the maximum wind power tracking of the wind turbine and reduce the voltage fluctuation.The grid voltage control strategy can improve the capability of low voltage ride through effectively to ensure the stable running of wind turbines as the grid fault.
squirrel-cage induction generator;maximum power tracking;wind power generation;full rated converter
T M614
A
2012-06-05。
國家自然科學(xué)基金資助項目 (50977028)。
王瑞新 (1986-),男,碩士研究生,研究方向為籠型異步變速恒頻風(fēng)力發(fā)電系統(tǒng),Email:risan1221@163.com。
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
大電機技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
智能建筑電氣技術(shù)(2015年5期)2015-12-10 05:52:30
電測與儀表(2014年17期)2014-04-04 11:56:50