車流量的的交通信號燈控制模式和仿真
2012-02-20 03:32:36胡耀增
裝備制造技術 2012年11期
關鍵詞:檢測
胡耀增,李 楊,林 晨
(青島理工大學(臨沂)機電工程系,山東 臨沂 273400)
在社會主義市場經濟快速發展的推動下,城市化進程不斷加快,人們的生活品質不斷改善,汽車已經成為了大多數人的隨行工具,如何解決不斷增加的車輛給城市帶來的巨大壓力成為了當今城市建設的熱點問題。本文通過對車流量的統計分析以及車輛控制模式探討,使用MATLAB編制了仿真程序,對方案進行了仿真實驗。
1 車道車輛數統計
車道車流量的統計數據需要通過壓力傳感器來完成。壓力傳感器的種類繁多,其性能也有較大的差異,在選擇的時候一定要使用盡量寬的壓力范圍,在實際的使用中,傳感器的壓力要保證在其范圍之內。這樣才能保證壓力傳感器的敏感度,提高檢測品質。經過大量的數據顯示:機動貨車和長途客車的品質平均最重,在1 200 kg到2 000 kg之間;摩托車的質量在150 kg到200 kg之間。那么,這些小型的機動車輛在那些大型卡車面前就顯得微不足道,壓力傳感器能夠檢測到大型卡車,但未必可以精確的檢測到小型機動車。那么,如何能使壓力傳感器在正確檢測大型卡車的同時,也能保證小型車輛的統計是我們需要特別注意的。
因此,在選擇壓力傳感器的時候要合理控制好它的檢測范圍,下線最低要控制在200 kg以上。比如,一個小型摩托車的質量是150 kg,加上人的平均體重是60 kg,一共是210 kg,那么把傳感器的檢測范圍最低線控制在200 kg即可滿足條件。在大中型城市道路中,最常見的十字路口為雙向6車道,例如圖1所示,四個方向的每條車道都分為直行、左轉彎,右轉彎三個變道。要進行車流量的統計,需要把壓力傳感器分別分布在每個車道的遠側和近側各一個,把兩個檢測器之間的范圍作為車流量檢測區,假設這遠側和近側的傳感器相距100 m。遠側傳感器負責操作車道內車的增加數量,近側傳感器負責操作車道內車的減少數量,這樣就可以很輕松的得到車道內等待通行的車輛數目。按照此道理,系統把每一次車道收集的數據儲存對比來判斷當下交通狀態。
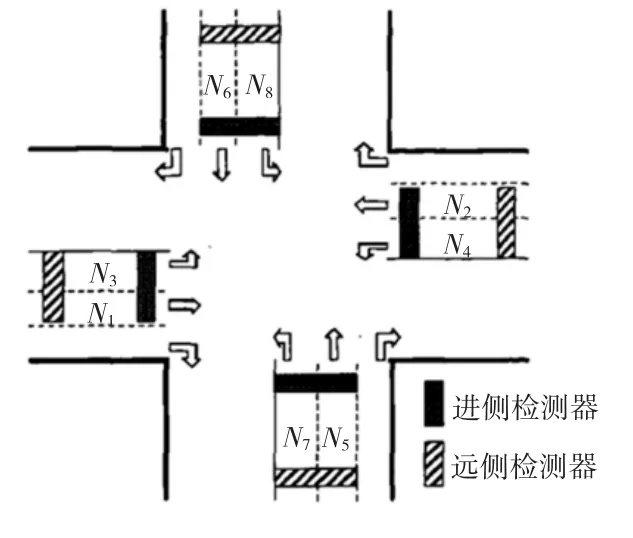
圖1 交叉路口車流示意圖
2 指示燈控制車輛放行的模式
系統依據壓力傳感器收集到的每個方向的等待通過車輛數目,根據數目的大小相對制定出所要放行的時間,把自動周期自動交通燈時間長短比例和固定周期自動調節交通燈時間長短比例這兩種方法結合到一起,在道路上有些方向通行車輛稀少時使用門動周期,對那些通行車輛數量比較大的道路上面使用同定周期自動調節交通時間長短的比例方式。這兩種方式的使用有明顯的差別,可根據在監測范圍內等待放行的車輛數而定。比如,當發生有兩個方向的汽車數量候車長度達到或者超過100 m的控制范圍之后,應該采用同定周期自動調節交通時間長短的比例方式,如果沒有出現這種情況就使用另外一種方式。
2.1 同定周期減少車輛延誤時間方法
車輛在行駛的過程中,一般會提前100 m或者更早的時間進入自己行駛方向的相對車道,我們先來設想在時間t時刻,每一個車道里面100 m之內的車輛全部為等待放行的車輛,首先使用遠側傳感器檢測車輛數目的增加數,增加多少就會被記錄多少,根據這一原則無需考慮指示燈是紅燈還是綠燈,都可以準確的確定等待放行的車輛數目。這里我們要講的這個控制系統是在綠燈的情況下完成的,在綠燈時車輛順利通行,當數量減少到某一個特定的數字假設N時,綠燈便可以自動停止,然后下一個車道開始放行,這里我們假設的數字N可以說成是最小車輛及留存數。這里需要特別提出,因為每一個車道的通行都有兩個方向,所以當綠燈關閉的時候,車輛的留存數N要求兩個方向的車輛數都滿足這個條件。
為了提高公路的通行率,留存數N就是我們需要優化的對象,可以優化平均車輛的延誤時間來減少留存數。我們利用matlab進行仿真分析,仿真的周期定位在12 000 s,留存數N取1到10,分十次計算,經過反震分析,我們的得出最終結果,如表1所示,結果明顯顯示當N是6的時候,車輛的延誤時間為最少。

表1 不同留存數對應的平均車輛延誤時間 s/輛
2.2 固定周期避免多道車輛同時擁堵方法
上面介紹的方法可以自動調整指示燈的時間長短,控制車道內車輛順利通行的數量和截停留存的數量,可是其卻存在著一個缺陷:當相連的多個車道同時達到形式高峰期的時候,此車道為了順利達到要求控制指示燈的長短會造成其他車道因擁擠長時間堵車的現象,從而增加其他車道車輛的等待時間。因此,當出現兩個或者多個車道同時達到車輛高峰期的時候就不能采用這用方案,就需要適時的使用固定周期的方法。
以上兩種方法的使用需根據是否有多個車道同時出現車輛高峰期為限,當出現的時候需要采用固定周期自動調整指示燈長短比例,當沒有出現的時候采用控制綠燈時長減短車輛延誤時間的方法。假設車輛的本身長度為3 m,那么在100 m的等待放行車輛范圍內就會有33輛車,同時對相聯系的多個車道分析,如果有超過兩個車道都達到33輛以上,則采用固定周期方法。
假定P1、P2、P3和P4依次為每一個方向100 m內車輛等待通行的車輛數目,周期設為T=120 s,那么可以計算出來本周期每一個方向的綠燈時長為:

3 車輛通行的仿真分析
假定車輛在到達100 m的等待范圍之內的速率是0.4輛/s,順利通行離開控制檢測范圍的速率是1輛/s;假設在交通指示燈變化的每一個周期內,車輛到達和離開檢測范圍的速率是固定的,這個速率產生也是隨機的,那么所有的車輛在每個車道延誤的時間即為車輛延誤時間的總和,在綠燈時,相對的兩個方向所有順利通過指示燈的車輛數即為通過的總車輛。這樣就不難算出每輛車的平均延誤時間了。以下把12 000 s定為仿真的時間,把車流量的情況分為車流量輕、車流量中、車流量重三個級別,這三種情況下,車輛到達測試范圍的速率依次為小于0.2輛/s、0.3輛/s和0.4輛/s,三種情況下都做6次仿真分析,計算出每輛車的平均延誤時間獲得的平均車輛延誤時間。表2為分析的數據圖。

表2 各種車流量情況下的平均車輛延誤時間 s/輛
4 結束語
交通信號燈的控制系統是智能交通管理的重要部分,其不僅可以合理疏導城市道路交通節奏,而且可以減低車輛的延誤時間和環境污染。現在,幾乎所有的交叉路口基本都是采用紅、綠、黃三個信號指示燈來控制車輛通行的正常秩序,造成了嚴重的城市道路擁堵,顯然這種方式還需要繼續改進,希望以后通過大家的共同努力可以解決這個問題,設計出完美的交通燈信號控制系統。
[1]崔寶俠,楊繼平,徐春鋒.城市交通燈信號配時控制器優化的一種新策略[J].沈陽工業大學學報(自然科學版),2007,29(5):554—559.
[2]唐 權.慕于CORBA及多層C/S模式的分布式軟件控制系統[J].重慶工學院學報,2008,22(1):150.
[3]王曉薇,王 慧.基于GA的交叉路口自適應模糊控制器設計[J].吉林大學學報(自然科學版),2004,22(4):346—352.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48