雙蘭杰文振子V型直線超聲波電動(dòng)機(jī)的設(shè)計(jì)與實(shí)驗(yàn)
2012-02-22 08:21:40洪尚任
微特電機(jī) 2012年5期
喬 木,洪尚任
(華僑大學(xué),福建廈門(mén)362021)
0 引 言
超聲波電動(dòng)機(jī)擁有許多傳統(tǒng)電機(jī)無(wú)法比擬的優(yōu)勢(shì),比如重量輕、無(wú)電磁干擾、機(jī)械結(jié)構(gòu)簡(jiǎn)單、無(wú)需齒輪減速器、噪聲低、高自鎖力和高的位置精度等,使得超聲波電動(dòng)機(jī)在許多工業(yè)領(lǐng)域得到了廣泛的應(yīng)用。
本文提出了一款由雙蘭杰文振子組成的V型超聲波直線電動(dòng)機(jī),詳細(xì)介紹了電機(jī)的工作原理并且使用有限元分析的方法優(yōu)化了電機(jī)的定子。
1 V型電機(jī)定子的結(jié)構(gòu)和工作原理
1.1 V型電機(jī)定子的結(jié)構(gòu)
由圖1可知,電機(jī)的定子部分由摩擦材料、前蓋板、壓電陶瓷、螺母、支撐架和雙頭螺桿組成。

圖1 V型電機(jī)定子結(jié)構(gòu)
前蓋板采用的是階梯型變幅桿,目的是將壓電陶瓷產(chǎn)生的振動(dòng)能放大。這里使用密度小、能夠承受很大張拉應(yīng)力的鋁合金2AI1;定子尾部的螺母使用的是不銹鋼304,它的特點(diǎn)是密度大、強(qiáng)度高,聲速較鋁合金材料小,有利于振動(dòng)波最大限度地向前輻射,從而提高電機(jī)的效率。同時(shí)尾部使用重金屬,還能夠有效地縮短定子的尺寸;定子中部是兩對(duì)面對(duì)面放置的圓環(huán)形壓電陶瓷片,尺寸是Φ20 mm×Φ10 mm,其中正極接在兩個(gè)壓電陶瓷片中間,電極片使用的是普通薄銅片。為了消除壓電陶瓷片和薄銅片之間空氣間隙,并且提高定子組裝效率,我們使用環(huán)氧樹(shù)脂膠將壓電陶瓷片和銅片粘成了一體。摩擦材料使用的是碳素工具鋼T8。支撐架的厚度是5 mm,使用的材料是鋁合金2AI1,它的作用是將兩側(cè)的蘭杰文振子連接在一起,并且通過(guò)它將定子與外界固定起來(lái)。
1.2 電機(jī)的工作原理
使用ANSYS軟件對(duì)定子進(jìn)行固有模態(tài)計(jì)算。將支撐架的下表面作為位移約束。當(dāng)給定子兩側(cè)接入相同頻率、相同相位的高頻電信號(hào)時(shí),將激發(fā)出圖2(b)所示的對(duì)稱(chēng)振動(dòng),此時(shí)定子驅(qū)動(dòng)足法向運(yùn)動(dòng);當(dāng)定子兩側(cè)接入的電信號(hào)頻率相同,相位相反時(shí),將激發(fā)出圖2(a)所示的非對(duì)稱(chēng)振動(dòng),此時(shí)定子驅(qū)動(dòng)足切向運(yùn)動(dòng)。
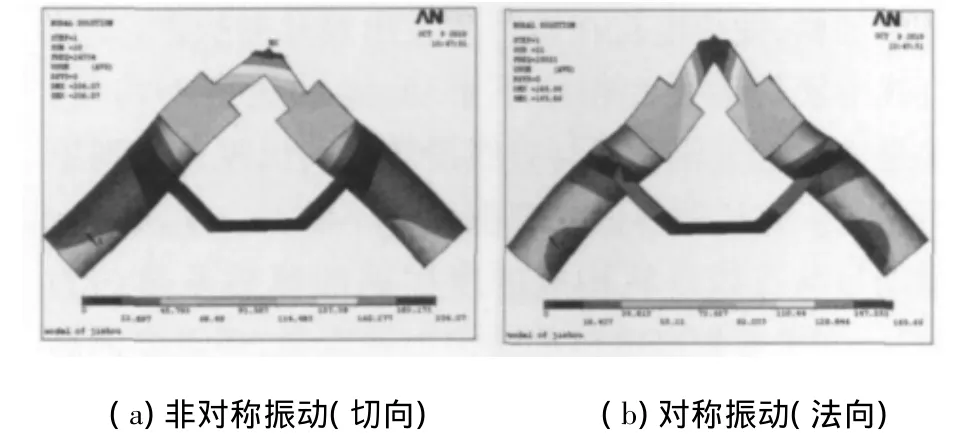
圖2 定子的工作模態(tài)
如果給定子左右兩側(cè)接入兩個(gè)同頻、相位差為90°的高頻電信號(hào)時(shí),調(diào)整輸入電流的頻率,直到能夠同時(shí)激發(fā)出對(duì)稱(chēng)和非對(duì)稱(chēng)兩個(gè)振動(dòng)模態(tài)。這樣,兩個(gè)振動(dòng)疊加的結(jié)果是,定子的驅(qū)動(dòng)足上出現(xiàn)橢圓運(yùn)動(dòng)。當(dāng)切換左右兩側(cè)的電信號(hào),驅(qū)動(dòng)足的橢圓運(yùn)動(dòng)將反向。
在ANSYS中所需要的各種材料參數(shù)和有限元?jiǎng)澐值膯卧?lèi)型,如表1所示。

表1 材料參數(shù)表
2 使用ANSYS軟件對(duì)定子進(jìn)行優(yōu)化
使用ANSYS軟件對(duì)定子進(jìn)行固有模態(tài)計(jì)算,由計(jì)算結(jié)果可知,定子是利用一階縱振和二階彎振工作的。最初設(shè)計(jì)的定子,其對(duì)稱(chēng)振動(dòng)和非對(duì)稱(chēng)振動(dòng)的固有頻率差為826 Hz,而且偽振動(dòng)(驅(qū)動(dòng)足部分振動(dòng)方向垂直于對(duì)稱(chēng)振動(dòng)和非對(duì)稱(chēng)振動(dòng)的工作面)的固有頻率與非對(duì)稱(chēng)的固有頻率差僅為950 Hz。所以需要對(duì)定子進(jìn)行優(yōu)化。優(yōu)化的目標(biāo)是對(duì)稱(chēng)振動(dòng)和非對(duì)稱(chēng)振動(dòng)的固有頻率差控制在300 Hz左右,偽振動(dòng)的固有頻率要遠(yuǎn)離對(duì)稱(chēng)振動(dòng)和非對(duì)稱(chēng)振動(dòng)的固有頻率。這里將螺母的長(zhǎng)度作為調(diào)整參數(shù),圖3為螺母長(zhǎng)度與定子固有頻率的關(guān)系曲線。圖4是定子偽振動(dòng)的位移云圖。
當(dāng)后蓋板長(zhǎng)度為41 mm時(shí),V型定子的非對(duì)稱(chēng)振動(dòng)模態(tài)(24 734 Hz)和對(duì)稱(chēng)振動(dòng)模態(tài)(25 021 Hz)的頻率差是287 Hz,達(dá)到了優(yōu)化要求。而此時(shí)的偽振動(dòng)(22 982 Hz)也已經(jīng)遠(yuǎn)離了兩個(gè)工作模態(tài)。

圖3 螺母長(zhǎng)度與定子固有頻率的關(guān)系曲線

圖4 偽振動(dòng)位移云圖(22 982 Hz)
通過(guò)圖2可以看到,支撐架的變形量非常小,說(shuō)明支撐架確實(shí)位于兩個(gè)蘭杰文振子的位移節(jié)面處。這樣就可以最大限度地降低由于支撐架的變形而消耗的能量,提高了電機(jī)的輸出效率。
3 V型電機(jī)的輸出特性
圖5是實(shí)驗(yàn)平臺(tái)照片,直線滑軌的材料為45#鋼,行程130 mm,移動(dòng)部分的重量是100 g,定子兩側(cè)螺母的預(yù)緊力為7 N。

圖5 實(shí)驗(yàn)平臺(tái)
3.1 無(wú)負(fù)載速度-頻率特性
當(dāng)彈簧預(yù)壓力F=11 N,電源輸入電壓峰-峰值680 V,相位差90°時(shí),電機(jī)的無(wú)負(fù)載速度-頻率特性曲線如圖6所示。由圖6可知,實(shí)驗(yàn)樣機(jī)的諧振頻率 f=22.9 kHz。當(dāng)電源的激勵(lì)頻率逐漸遠(yuǎn)離諧振頻率時(shí),電機(jī)的輸出速度逐漸降低。在預(yù)壓力11 N,輸入電壓峰-峰值680 V,相位差為90°時(shí),電機(jī)無(wú)負(fù)載的輸出速度達(dá)到162.5 mm/s。輸入頻率22~24 kHz范圍內(nèi)變化時(shí),電機(jī)速度都在40 mm/s以上。由此可以說(shuō)明,電機(jī)可工作的頻率范圍很大,抗干擾能力較強(qiáng)。

圖6 電機(jī)無(wú)負(fù)載的速度-頻率特性曲線
3.2 無(wú)負(fù)載速度-預(yù)壓力特性
圖7給出的是電機(jī)在驅(qū)動(dòng)頻率f=23.32 kHz,輸入電壓峰-峰值680 V,相位差為 90°時(shí),無(wú)負(fù)載的情況下測(cè)得的速度-預(yù)壓力曲線。

圖7 無(wú)負(fù)載速度-預(yù)壓力特性
由圖7可以得知,預(yù)壓力的大小對(duì)于電機(jī)的輸出速度有很大的影響。當(dāng)預(yù)壓力F=11 N時(shí),電機(jī)輸出的速度最大。在較小的預(yù)壓力下,定子驅(qū)動(dòng)足與導(dǎo)軌之間的壓力較小,即定子驅(qū)動(dòng)足與直線滑軌之間的彈性變形量較小,使得定子驅(qū)動(dòng)足與直線滑軌間的接觸時(shí)間較短,所以直線滑軌的前進(jìn)步幅較大,這時(shí)電機(jī)表現(xiàn)出的是速度比較快;當(dāng)電機(jī)的預(yù)壓力逐漸增大時(shí),定子驅(qū)動(dòng)足部分的彈性變形加大,從而延長(zhǎng)了定子驅(qū)動(dòng)足與直線滑軌之間的接觸時(shí)間,使得直線滑軌的前進(jìn)步幅減小,電機(jī)的輸出速度降低。
3.3 無(wú)負(fù)載速度-電壓特性

圖8 無(wú)負(fù)載速度-電壓特性
圖8給出的是電機(jī)在給定諧振頻率f=22.9 kHz,相 位 差 為90°,預(yù)壓力 F=11 N時(shí),測(cè)得的無(wú)負(fù)載速度-電壓特性曲線。本次實(shí)驗(yàn)中,使用了四個(gè)不同電壓峰 -峰值,分別為 600 V、680 V、780 V、880 V,通過(guò)圖8可以發(fā)現(xiàn),隨著電壓的增加,電機(jī)的輸出速度不斷提高。在諧振頻率f=22.9 kHz,電壓峰-峰值為880 V,相位差為90°,預(yù)壓力F=11 N時(shí),電機(jī)取得了本次實(shí)驗(yàn)的最大值,達(dá)到了206 mm/s。
3.4 有負(fù)載速度-頻率特性
電機(jī)在實(shí)際使用過(guò)程中,一定是帶有負(fù)載的。所以,電機(jī)在施加負(fù)載后的工作狀態(tài),對(duì)于電機(jī)實(shí)際的應(yīng)用更加具有參考價(jià)值。

圖9 有負(fù)載速度-頻率特性
電機(jī)有負(fù)載速度-頻率特性,如圖9所示。在接入負(fù)載G=1.93 N后,為了增加定子驅(qū)動(dòng)足與直線滑軌間的摩擦力,我們?cè)黾恿祟A(yù)壓力,實(shí)驗(yàn)中的預(yù)壓力F=21 N。在實(shí)驗(yàn)過(guò)程中,調(diào)節(jié)不同的頻率,直線滑軌的運(yùn)動(dòng)很平穩(wěn),沒(méi)有噪聲。電機(jī)在諧振頻率f=22.9 kHz處,速度達(dá)到最大值為102 mm/s。與圖6對(duì)比可知,接入負(fù)載G=1.93 N后,電機(jī)的可工作頻率范圍變小。
3.5 單側(cè)蘭杰文振子驅(qū)動(dòng)時(shí)的速度-頻率特性
當(dāng)只有一側(cè)的振子被激勵(lì)時(shí),由壓電陶瓷產(chǎn)生的縱振波一部分傳遞到了驅(qū)動(dòng)足,而另一部分縱振波則傳向了另外一側(cè)的振子,經(jīng)過(guò)后蓋板反射后再次到達(dá)驅(qū)動(dòng)足。這列經(jīng)過(guò)反射后的波便與激振源產(chǎn)生的振動(dòng)波出現(xiàn)了相位差。這相當(dāng)于另一側(cè)的振子也被施加了一個(gè)同頻率不同相位的振動(dòng)信號(hào)。所以,在某一頻率范圍內(nèi),定子驅(qū)動(dòng)足依然可以產(chǎn)生對(duì)稱(chēng)振動(dòng)和非對(duì)稱(chēng)振動(dòng)。兩種振動(dòng)疊加的結(jié)果,便是定子驅(qū)動(dòng)足上的橢圓運(yùn)動(dòng)。
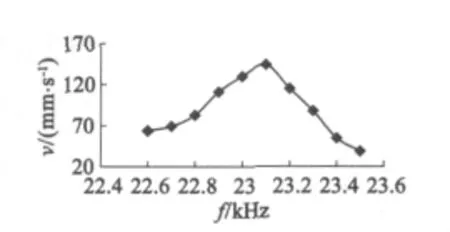
圖10 單側(cè)驅(qū)動(dòng)速度-頻率特性
圖10是給定驅(qū)動(dòng)電壓峰 -峰值680 V,彈簧的預(yù)壓力F=11 N時(shí),無(wú)負(fù)載條件下,單個(gè)蘭杰文振子的速度-頻率特性。
3.6 電機(jī)輸出力實(shí)驗(yàn)
實(shí)驗(yàn)測(cè)得電機(jī)最大輸出力為10.5 N,單側(cè)振子驅(qū)動(dòng)時(shí)的最大輸出為5 N。但是,同時(shí)發(fā)現(xiàn)當(dāng)負(fù)載超過(guò)5 N時(shí),由于需要增加預(yù)壓力以提供足夠大的摩擦力,電機(jī)在驅(qū)動(dòng)負(fù)載的運(yùn)行中,噪聲開(kāi)始加大。當(dāng)負(fù)載達(dá)到10 N時(shí),定子驅(qū)動(dòng)足與導(dǎo)軌之間的磨損開(kāi)始加劇,使得電機(jī)在運(yùn)行中發(fā)出刺耳的噪聲,并且直線滑軌的運(yùn)行變得很不平穩(wěn),運(yùn)動(dòng)速度不均勻。這是由于定子驅(qū)動(dòng)足與直線滑軌之間出現(xiàn)打滑現(xiàn)象引起的。這說(shuō)明界面的摩擦系數(shù)不夠大。本次試驗(yàn)驅(qū)動(dòng)足與直線滑軌構(gòu)成的摩擦副的摩擦系數(shù)約為0.2。如果要提高電機(jī)的輸出力和壽命,還需要提高直線滑軌和定子之間摩擦副的摩擦系數(shù)。圖11是輸出力實(shí)驗(yàn)前后,直線滑軌表面的對(duì)比。

4 結(jié) 語(yǔ)
本文設(shè)計(jì)了一款V型超聲波直線電動(dòng)機(jī),使用ANSYS軟件計(jì)算了電機(jī)的對(duì)稱(chēng)模態(tài)和非對(duì)稱(chēng)模態(tài)頻率,并對(duì)定子進(jìn)行了優(yōu)化。優(yōu)化的結(jié)果是對(duì)稱(chēng)模態(tài)和非對(duì)稱(chēng)模態(tài)的頻率差為287 Hz,使兩者能夠更好的簡(jiǎn)并。對(duì)電機(jī)做了比較詳細(xì)的輸出特性實(shí)驗(yàn),實(shí)驗(yàn)表明該電機(jī)最大輸出速度206 mm/s,最大輸出力10.5 N。
[1] Kurosawa M,Kodaira O.Transducer for high speed and large thrust ultrasonic linear motor using two sandwich - type vibrators[J].IEEE Trans.on ultrasonics,ferrodectrics,and frequency control,998,45(5):1188 -1195.
[2] Asumi K,Kurosawa M.Miniaturization of a V -shape Transducer Ultrasonic Motor.The Japan Society of Applied Physics,2009,44(07GM02):1-5.
[3] 胡國(guó)良.Ansys11.0有限元分析入門(mén)與提高[M].北京:國(guó)防工業(yè)出版社,2009.
[4] 李朝東.直線型壓電駐波超聲電機(jī)的研究[D].南京:南京航空航天大學(xué),1998.
[5] 林書(shū)玉.夾心式壓電陶瓷功率超聲換能器的優(yōu)化設(shè)計(jì)[J].壓電與聲光,2003,25(3):199 -202.
[6] 戴雄杰.摩擦學(xué)基礎(chǔ)[M].上海:上海科學(xué)技術(shù)出版社,1989.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
瘋狂英語(yǔ)·新讀寫(xiě)(2020年3期)2020-06-06 09:05:56
中國(guó)公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
航空學(xué)報(bào)(2015年4期)2015-05-07 06:43:35
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44