基于單目視覺的車牌快速定位方法
2012-02-28 05:10:42楊先勇王會(huì)巖周曉莉劉東基宋盼盼
網(wǎng)絡(luò)安全與數(shù)據(jù)管理 2012年15期
楊先勇 ,王會(huì)巖 ,周曉莉 ,劉東基 ,宋盼盼
(1.重慶大學(xué),重慶 400044;2.山東文登師范學(xué)校,山東 文登 264400;3.陜西渭河煤化工集團(tuán)有限公司,陜西 渭南 714000)
高速公路上車輛踫撞是最常見的交通事故,因此,對(duì)前方道路上行駛的車輛進(jìn)行定位與跟蹤是智能輔助駕駛系統(tǒng)研究領(lǐng)域的重要內(nèi)容。車輛定位與跟蹤要求算法具有實(shí)時(shí)性、快速性和準(zhǔn)確性等特點(diǎn)。視頻圖像包含了大量的圖像信息,便于功能擴(kuò)展,同時(shí),視頻設(shè)備安裝調(diào)試簡(jiǎn)單、成本低廉且實(shí)用性強(qiáng),而單目攝像頭法處理的信息量相對(duì)較少,處理速度更快。因此,本文采用單目視覺輔助技術(shù)對(duì)車輛進(jìn)行檢測(cè)、定位和跟蹤。
目前視覺車牌定位的方法有很多。黃驥等[1]在HSV顏色空間上,根據(jù)我國(guó)車牌顏色的特點(diǎn)作為車牌區(qū)域顏色跳變特征,準(zhǔn)確率高,但計(jì)算量大,實(shí)時(shí)性不夠。盧雅琴等[2]采用了數(shù)學(xué)形態(tài)學(xué)方法進(jìn)行車牌定位,該方法簡(jiǎn)單且在背景單一及車牌區(qū)域特征明顯的情況下有很好的效果,但是復(fù)雜背景下車牌定位準(zhǔn)確率不高。陸鋮等[3]提出采用灰度跳變特征,具有較快的檢測(cè)速度,但準(zhǔn)確性受噪聲影響很大。LEE E R等[4]提出以HSV顏色空間為基礎(chǔ)的車牌識(shí)別系統(tǒng),使用了Hough變換方法,雖然識(shí)別率比較高,但當(dāng)車身與車牌顏色相近或車牌污染嚴(yán)重時(shí),會(huì)大大降低定位準(zhǔn)確率。鹿曉亮等[5]考慮到國(guó)內(nèi)車牌的特有特征以及字符間特點(diǎn),對(duì)車牌區(qū)域橫向掃描,根據(jù)閾值來定位車牌,但該方法不適合快速定位的要求。針對(duì)快速自動(dòng)識(shí)別系統(tǒng)的要求,根據(jù)國(guó)內(nèi)車牌顏色特征及車牌的外廓尺寸的固有特征,本文提出先基于車牌色彩信息選取敏感區(qū)域,然后再根據(jù)形態(tài)學(xué)的方法來進(jìn)行篩選,從而達(dá)到快速定位。
1 總體流程
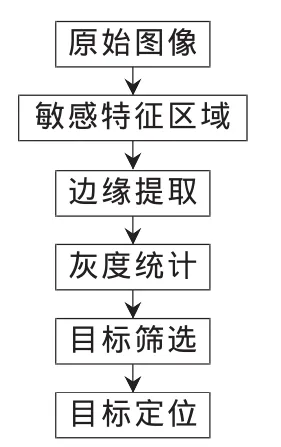
圖1 總體流程圖
前方車輛的檢測(cè)與定位算法流程如圖1所示,包括以下幾個(gè)步驟:
(1)特征區(qū)域。利用顏色空間理論,選取車牌顏色為特征,確定圖像中的敏感區(qū)域。
(2)邊緣提取。基于 Canny邊緣提取算法,對(duì)特征區(qū)域圖像進(jìn)行邊緣提取。
(3)灰度統(tǒng)計(jì)。基于圖像邊緣提取結(jié)果,統(tǒng)計(jì)每一部分區(qū)域長(zhǎng)度與寬度的數(shù)值。
(4)目標(biāo)篩選。根據(jù)每一部分的長(zhǎng)度與寬度的數(shù)值比值篩選出車牌。
(5)目標(biāo)定位。當(dāng)篩選部分只剩下一個(gè)時(shí),即為目標(biāo)對(duì)象。
1.1 敏感特征區(qū)域
選擇合適的顏色空間模型快速準(zhǔn)確地找到敏感特征區(qū)域是非常關(guān)鍵的。考慮到實(shí)際需要關(guān)注的特性,確定RGB顏色空間到HSI顏色空間的轉(zhuǎn)換近似公式[6]。本文強(qiáng)調(diào)在各種環(huán)境下快速尋找藍(lán)色,對(duì)顏色的細(xì)節(jié)識(shí)別要求比較高,要求轉(zhuǎn)換后顏色的分辨力盡可能大,但又要考慮到運(yùn)算時(shí)間盡可能短。因此本文采用分段定義法來近似RGB轉(zhuǎn)換到HSI的關(guān)系:
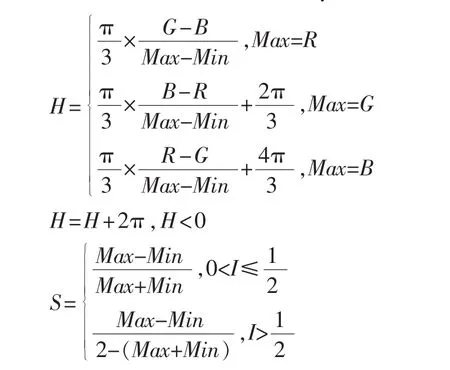
其中,H為色度,S為飽和度,I為亮度,R、G、B為 RGB顏色空間的紅、綠、藍(lán)色值,Max=max(R,G,B),Min=min(R,G,B)。
圖2為通過顏色特征提取的區(qū)域。

圖2 藍(lán)色特征區(qū)域
1.2 邊緣提取
圖像邊緣含有大量重要的圖像特征信息,因此,邊緣檢測(cè)的方法是圖像分析與識(shí)別領(lǐng)域十分重要的課題。本文中的車牌邊緣是一個(gè)非常重要的信息,利用這個(gè)信息可以從第一步選取出的敏感區(qū)域中快速篩選和確定車牌。本文引用Canny算子,該算子是一類具有優(yōu)良性能的邊緣檢測(cè)算子,其基本思想是:先對(duì)預(yù)處理的圖像選擇一個(gè)高斯濾波器進(jìn)行平滑濾波,然后采用一種稱為“非極大抑制”的技術(shù)對(duì)平滑后的圖像進(jìn)行處理,得到最后所需要的邊緣圖像。在實(shí)際應(yīng)用中,Canny算子邊緣提取效果良好,邊緣線性程度較好且完整,線型較細(xì),具有良好的抗噪性能和邊緣定位精度。本文利用Canny算子進(jìn)行邊緣提取的結(jié)果如圖3所示。
圖3 邊緣提取后圖像
1.3 灰度統(tǒng)計(jì)與目標(biāo)篩選
為了準(zhǔn)確地篩選出目標(biāo)車牌,根據(jù)車牌特有的信息對(duì)邊緣信息進(jìn)行邊緣提取后,分兩步篩選出目標(biāo)車牌。
(1)利用車牌邊緣的邊長(zhǎng)比例關(guān)系篩選。首先分割出每個(gè)獨(dú)立的有連續(xù)邊緣的圖像塊,若大圖像塊內(nèi)有小的圖像塊,則小圖像塊不作單獨(dú)處理,統(tǒng)計(jì)圖像塊在水平方向和垂直方向的灰度像素統(tǒng)計(jì),統(tǒng)計(jì)完成后,計(jì)算水平方向和垂直方向灰度像素比值t。車牌是一個(gè)440×140的矩形,車牌的長(zhǎng)寬比為3.14,考慮到攝像機(jī)記錄車牌的角度變化等各種因素的影響,確定閾值上限為5,閾值下限為 2.5,若計(jì)算出來的比值 t在 2.5~5之間,則認(rèn)為是目標(biāo)車牌。
(2)利用車牌的直角關(guān)系篩選。車牌在長(zhǎng)度和寬度的接連處是一個(gè)垂直關(guān)系,因此,本文利用車牌的直角關(guān)系可以快速地篩選出絕大部分非目標(biāo)物體。以篩選左邊直角為例,從分割出的圖像塊從上往下、從左往右開始掃描,當(dāng)?shù)綊呙璧降谝粋€(gè)點(diǎn)時(shí),以該點(diǎn)為中心點(diǎn),計(jì)算中心點(diǎn)向下邊緣線和中心點(diǎn)向右邊緣線的夾角θ。考慮到攝像機(jī)記錄時(shí)產(chǎn)生的形變及車牌角度的變化等因素對(duì)圖像坐標(biāo)系中夾角的影響,確定在一定閾值范圍內(nèi)的角度即為直角范圍,本文中采用的閾值上限為105°,下限為 85°。若計(jì)算所得夾角 θ在 85°~105°之間,則認(rèn)為是目標(biāo)車牌。
1.4 目標(biāo)定位
經(jīng)過兩個(gè)特征關(guān)系的篩選后,目標(biāo)車牌即可被篩選出來。目標(biāo)車牌提取出來后,記錄下車牌的大小及在圖像中的位置。為了方便能更快速地定位從攝像機(jī)中提取的下一幀圖像,本文采用一種新的搜索方法,即以已經(jīng)確定的目標(biāo)車牌為中心,四周按一定比例進(jìn)行面積擴(kuò)大。本文從攝像機(jī)中按10幀/s的速度提取圖像,即兩幀圖像間隔為 0.1 s,而車輛的速度為 60 km/h~100 km/h,因此在0.1 s間最大的相對(duì)行駛速度為(100-60)km/h,最大的相對(duì)行駛距離為 40 km/h×0.1 s=1.1 m。根據(jù)攝像機(jī)的相關(guān)原理,算出圖像坐標(biāo)系中車牌的大小的變化率在10%以內(nèi),因此,本文選擇按擴(kuò)大長(zhǎng)度的10%和寬度的10%作為下一幀圖像的大小范圍。圖4所示為第1次定位所用時(shí)間,圖5所示為第2次定位所用時(shí)間。

圖4 第1次定位時(shí)間 圖5 第2次定位時(shí)間
2 實(shí)驗(yàn)結(jié)果與分析
本文選用不同背景、不同光照下拍攝的100幅車牌圖像對(duì)本算法進(jìn)行仿真實(shí)驗(yàn),結(jié)果如表1所示。可見準(zhǔn)確定位率達(dá)到92%。若對(duì)連續(xù)運(yùn)動(dòng)的圖像進(jìn)行跟蹤定位,本算法第1次定位時(shí)間較長(zhǎng),達(dá)到1.13 s,第 2次及以后定位時(shí)間大幅度減少,平均為 0.65 s,只有第1次定位時(shí)間的57.5%,速度得到很大的提升。由于算法采用HSI顏色空間理論,因此受光線影響不大。本文主要研究了對(duì)前車輛的快速定位和車牌預(yù)處理,利用車牌的顏色對(duì)車牌的敏感特征區(qū)域進(jìn)行了提取,再利用車牌的形態(tài)特征進(jìn)行目標(biāo)車牌篩選,最后通過對(duì)車牌進(jìn)行圖像幾何校正,提取出精確的車牌。通過該方法,前方車輛得到了快速檢測(cè)與定位。仿真實(shí)驗(yàn)表明,該方法快速、高效,滿足實(shí)時(shí)性的要求,并且有較高的魯棒性,為下一步車輛的距離計(jì)算提供了良好的保障。
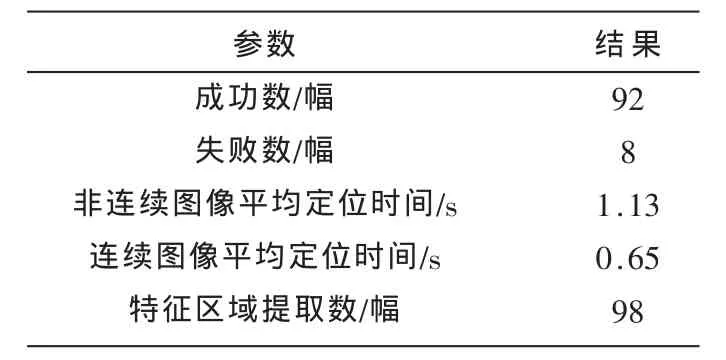
表1 車牌定位結(jié)果
[1]黃驥.汽車牌照識(shí)別系統(tǒng)中車牌定位與校正及字符分割的研究[D].南京:南京航空航天大學(xué),2007.
[2]盧雅琴,鄔凌超.基于數(shù)學(xué)形態(tài)學(xué)的車牌定位方法[J].計(jì)算機(jī)工程,2005,31(2):224-227.
[3]陸鋮,何東健,何曉.基于掃描線和特征篩選的車牌定位快速算法[J].計(jì)算機(jī)工程與設(shè)計(jì),2008(10):5125-5128.
[4]LEE E R,KING P K.Automatic recognition of a car license plate using color image processing[J].Journal of Korea Institute of Tele-matics and Electronics,1995,24(2):128-131.
[5]鹿曉亮,陳繼榮.復(fù)雜背景下快速車牌定位方法研究[J].計(jì)算機(jī)仿真,2006,23(7):256-259.
[6]劉華波.RGB與HIS顏色模型的轉(zhuǎn)換方法對(duì)比研究[EB/OL].中國(guó)科技論文在線,2008.
猜你喜歡
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
河南科技(2014年23期)2014-02-27 14:19:15