南宋西湖水上游戲『撥糊盆』
2024-02-15 00:00:00丁士舜
尋根 2024年6期


吳自牧《夢粱錄》卷十二《湖船》篇記載了南宋時期西湖游船繁多的勝景:“湖中南北搬載小船甚伙……更有賣雞兒及點茶、供茶果、婆嫂船,點花茶、撥糊盆、撥水棍小船、漁莊岸小釣魚船。湖中有撒網鳴榔打魚船。湖中有放生龜鱉螺蚌船。并是瓜皮船也。”
“撥糊盆”或作“撥湖盆”“撥盆”。《西湖老人繁勝錄》:“寒食前后,西湖內畫船布蒲,頭尾相接,有若浮橋……沓渾木、撥湖盆,它郡皆無。”糊、湖音同。“糊(湖)”或省略,作“撥盆”。宋周密《武林舊事》卷三《西湖游幸》:“至于吹彈、舞拍、雜劇、雜扮、撮弄、勝花、泥丸、鼓板、投壺、花彈、蹴、分茶、弄水、踏混木、撥盆……不可指數,總謂之‘趕人’,蓋耳目不暇給焉。”又作“潑巨盆”。元白《西湖賦》:“柘彈象弩,畫棍髹盆,羅襪凌波,金釵照春。”注云:“踏棍才、潑巨盆皆水戲。”(按:“才”應為“木”之誤。)
根據以上典籍材料可以判斷,“撥糊盆”至少是一種水上小船,很有可能是一種水上游戲。由于其詞義并不明朗,許多古今注疏都避談、錯談。如符均、張社國、闞海娟等學者,均未為“撥糊盆”作注。孟東生選注《西湖游船文選注》:“撥糊盆,各種反映南宋湖上水百戲的文獻讀本都只見其名,而無具體紀實,想必與‘踏混木’一樣,為湖上水百戲的一種表演伎藝。”注釋不詳。《武林舊事》:“拔盆,雜技之一,即表演者以背貼地,雙腳朝上,腳上放置盆之類,使之滾動或翻轉。”先不提典籍中未見其他“撥盆”記載,各地也未見名目相同的“撥盆”雜技。只說這類“撥盆”雜技需要以背貼地,顯然是一種陸上雜技,和水上游戲區別很大。此解應是受“踢弄”雜技的影響。“踢弄”興起于宋,即今“蹬技”,表演者往往仰臥于地,通過雙足頂弄、旋轉一些日常器物來表演一些驚險的動作。蹬技又分為輕蹬技和重蹬技,“輕蹬技展示雙足的靈巧,重蹬技以承力負重為特色”(王慧:《雜技》,黃山書社,2016年)。目前還有多地保留了這種精彩的雜技表演,如多次登上央視舞臺的“蹬傘”雜技,是典型的輕蹬技。再如河北省滄州市吳橋縣省級非物質文化遺產“蹬大缸”表演,便是典型的重蹬技,當地有打油詩云:“吳橋女兒真厲害,千斤大缸蹬得快。嫁個郎君不如意,一腳踢出大門外。”
“撥”為動詞,在賓語“糊盆”詞義不明時,很難判斷具體詞義。“糊盆”在典籍中或為“面糊盆”的簡寫。清王夫之雜劇《龍舟會》:“你道做官的,糊盆攪面稠。”《漢語大詞典》:“糊盆,亦作‘糊盆’。①盛放面糊的盆。元無名氏《陳州糶米》第一折:‘坐著個愛鈔的壽官廳,面糊盆里專磨鏡。’元張可久《醉太平·無題》曲:‘誰不見錢親,水晶環入面糊盆,才沾粘便滾。’亦指糊涂人。元無名氏《村樂堂》第四折:‘過來波,包龍圖門中面糊盆。’《天雨花》第十二回:‘饒你滿身都是口,也難說轉面糊盆。’②猶面糊桶。比喻糾纏不清的是非之地。元關漢卿《救風塵》第四折:‘糊盆再休說死生交,風月所重諧燕鶯侶。’”此二解也難合理解釋《夢粱錄》中“糊盆”的含義。
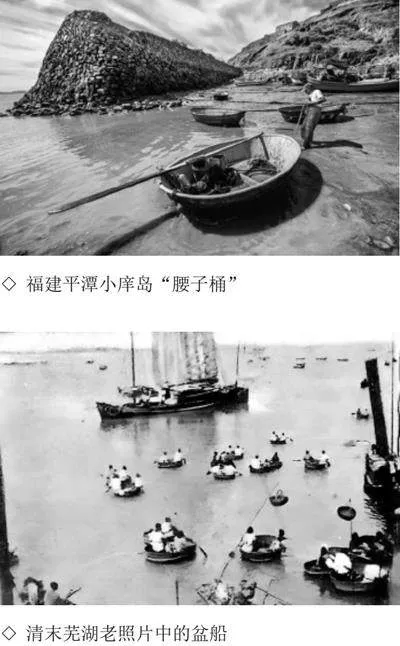
“糊盆”多見于農耕專書,如明徐光啟《農政全書》卷三十五《蠶桑廣類·木棉》:“但南中用糊有二法:其一先將綿作絞,糊盆度過,復于撥車轉輪作,次用經車縈回成囗,吳語謂之漿紗;其一先將綿入輕車成囗,次入糊盆度過,竹木作架,兩端用急維、竹帚痛刷,候干上機。吳語謂之刷紗。”余同元、黃康健在《明清江南織布技術的理論化》中認為:“對于棉、麻等短纖維的織制,一定要經過經紗上漿增大經線的強力、減磨和保伸,以改善經線的織造性能。漿紗,又稱為‘過糊’‘漿經’。”(《故宮學刊》第四輯,紫禁城出版社,2008年)“糊盆”用于裝漿糊,因此命名以“糊”。“糊盆”從作用上看是棉線上漿的漿盆,從形制上看是一種橢圓形的大木盆,也叫“糊船”。民國《上海縣續志》卷八《物產》載:“糊盆,大倍于腳桶,作橢圓形,俗呼糊船。譜棉紗成緞,后次乃用漿,漿必須細白好面調法,不可太熟,熟令紗墨,不可太生,生令紗不緊,須在糊盆漿浸過夕。”覺迷《記三月廿八之虹橋鎮》:“木器如糊盆(大倍于腳桶,作橢圓形,蓋刷布用者。俗呼糊船)。”根據錢民權《上海鄉村民俗用品集萃》的圖片來看,糊盆就是一個橢圓形的巨大木盆。而因為橢圓形類似腎臟,所以橢圓形的盆也多被稱作“腰子盆”。代少若《湖南贛語詞匯研究》:“腰子盆(橢圓形的木盆,形狀似腎)炎陵。”《上海話大詞典》:“腰子盆,〈名〉像腰子形狀的盆子。”“腰子盆”也常省略作“腰盆”。清顧炎武《天下郡國利病書》卷四十八《山西四》:“池形若腰盆,東西長而南北短。”王漢英《一條大河波浪寬》:“腰盆,顧名思義,形狀似‘腰’,兩頭尖中間大,短棹,像村婦洗衣的棒槌。”在福建平潭小庠島上,有一種特殊的漁船叫“腰子桶”,形制和腰盆相同。據平潭當地專家考證,腰子桶最早出現于宋代,是由浸染漁網的染盆演化而來的。染盆和糊盆的作用非常近似,我們可以推測,腰子盆應由糊盆發展而來。
在南方各地,尤其是有河湖的江南水鄉,盆往往作為小船使用,可以渡水、采菱、捕魚。黃火星《四月的浪花——大江重渡》:“在我們到達江邊時,日本鬼子已經對長江實行了嚴密的封鎖:搜走了沿江所有的渡船,天上有飛機沿江偵察,江上有巡邏艇不停地活動,岸上有巡邏隊往來搜索。幸而在一百步村找到了我們的一個聯絡站,這里的黨支部的同志劃著一只‘腰子盆’連夜偷渡過江,請江北游擊隊派來一條木船,把我們接到了江北。”劉瓊《七月芙蓉生翠水》:“腰子盆是長江流域采蓮和采菱角用的工具,形如腰子,兩頭尖,中間稍胖,也很淺,最多只能盛一人。”劉宏江《采菱》:“采菱,還是個靈巧活,一般都是獨坐一只小巧玲瓏的木腰盆,邊劃水邊采摘菱角。”《林散之傳》:“沿長江一帶,人們習慣于用這種盆(指腰盆)在水上捕魚,采菱角,放鴨子。”直至現在,腰盆仍在廣泛使用,桐城2021年12月20日新聞《拆解小“腰盆”,當好“禁漁衛士”》就記載了雙港鎮鴨子村為禁漁而拆腰盆的整治舉措。江南仍在使用盆船作為采蓮、采莼菜、采菱角的重要工具。在最近的新聞中,浙江省建德市航頭鎮烏龍村莼菜基地,村民依舊劃著“盆船”在西湖莼菜產業園種植基地的水面上采摘西湖莼菜。我們或許可以推測,在南宋的西湖地區,已經出現了用盆作船的現象。而糊盆是一種南方日常使用的橢圓形大盆,自然也能作為盆船,腰盆(腰子盆)就是其后世發展后的產物,“糊盆”之俗名“糊船”的理據也得以明晰。
“糊盆”詞義確定后,“撥”便豁然得解。“撥”作動詞時有“撥動”義,即橫向用力使物體移動。《漢語方言大辭典》:“撥,用手腳或棍棒等橫著用力,使物體移動。”這一詞義在揚州、蘇州等地方言中常用。葉忠正《吳語用字三百例》:“‘撥’的基本義是將手腳或棍棒等橫向用力,使東西移動,例如:撥船、撥弄、撥打。”這一詞義非常常見,且歷史悠久,早在唐朝已經出現,如我們耳熟能詳的《詠鵝》:“白毛浮綠水,紅掌撥清波。”張祜《少年樂》:“錦袋歸調箭,羅鞋起撥球。”其中的撥就是撥動義。到宋代,這一詞義繼續沿用,如馮山《漁翁》:“短棹撥輕舟,風恬江上游。”因此,“撥糊盆”之“撥”應為橫向用力,使船移動,而在具體語境中,指橫向撥水,讓糊盆移動。
那么,“撥糊盆”如何能夠算作水戲呢?其實,圓形的盆船劃起來很難控制,如果沒有出色的平衡力和熟練的技巧,很容易原地打轉、左右晃動,甚至于人仰船翻。劉宏江《采菱》就生動地描寫了初坐盆船的狼狽:“蹲坐在盆里,一開始,因為精神緊張,笨手笨腳找不到平衡,身子前傾后仰。木腰盆根本不聽使喚,一個勁地晃來晃去,而且不停地在水里打圈圈。晃著晃著,木腰盆便完全失去平衡,立即傾覆水中,翻個盆底朝天。坐在盆中的人,一個趔趄,撲通掉入水里,很容易被倒扣在盆底,悶在水中。好在塘水并不太深,而且水鄉長大的孩子大都識水性,撲騰一番后,濕淋淋地鉆出水面,算是有驚無險。但慌亂之中,免不了嗆幾口水。”再比如巢湖民歌(也稱巢歌,國家級非物質文化遺產)中有一首《歪歪號子》,就是劃盆船時所唱的勞動號子。“歪歪子,本名腰子盆,是對一種像豬腰子形狀小船的昵稱,一人或兩人(最多兩人)或坐或站其中。就像騎自行車,會者得心應手,不會駕馭者,無論站坐,都會東倒西歪,故又名歪歪子”(申育林:《巢歌研究》,合肥工業大學出版社,2013年)。
駕馭盆船雖然困難,但也有很強的趣味性,于是衍生出了很多娛樂項目,如水上平衡、盆舟競賽等。如巢歌的發祥地巢湖市,就常舉辦“劃盆競渡”這樣極具民俗色彩的競技運動項目。廣東佛山順德區有一種相對罕見的小龍舟,當地人稱之為“龍虱”,這種小船實際上就是木盆。這種獨特的水鄉盆船,并非中國獨有。如日本佐渡島便有盆舟捕魚的傳統,在動畫片《千與千尋》中,千尋就坐上過這種獨特的盆舟。再如越南有一種形似圓盆的竹編簸箕船,也被稱作“盆盆船”“臉盆船”“竹籃船”,最開始用于捕魚。但因為圓形的船體形制獨特,很難駕馭,于是發展成了當地很出名的旅游體驗項目。船夫在海面上用槳撥動船身,使船體在海面上飛速傾斜旋轉,讓游客上下起伏,隨船搖擺,這種幾乎炫技式的體驗,已經接近雜技的范疇了。因此撥糊盆能夠作為水戲,也是比較合理可信的。
最后,“撥湖盆”的盆或有髹漆的特點。元白《西湖賦》:“柘彈象弩,畫棍髹盆,羅襪凌波,金釵照春。”“髹盆”即為上漆的木盆。《玉篇·髟部》:“髹,赤黑漆也。”《漢語大詞典》:“髹盆,亦作‘盆’。涂上漆的木盆。”《剪燈余話·田洙遇薛濤聯句記》:“盆涼沁水,紈扇靜搖。”髹漆有美觀、防腐的效果,還兼有疏水之效,能提高船速。《舊唐書》卷一百四十六《杜亞傳》:“江南風俗春中有競渡之戲,方舟并進,以急趨疾進者為勝。亞乃令以漆涂船底,貴其速進。又為綺羅之服,涂之以油,令舟子衣之,入水而不濡。”宋孔傳續《唐宋白孔六帖》卷六《津渡》“競渡”條下轉引《舊唐書》:“競渡:杜亞拜淮南節度使,方春,南民為競渡戲。亞欲輕囗,乃舡底,使篙人衣油彩衣,沒水不濡。”
總結來看,“撥糊盆”也作“撥湖盆”,或作“撥盆”“潑巨盆”,為南宋西湖地區水上游戲的一種。“糊盆”是棉線上漿用的橢圓形大木盆,在南方也常作為小船使用,后多稱為“腰子盆”。由于在盆上很難保持平衡,需要一定的技術,再結合西湖處于江南水鄉、南宋時期經濟發達等背景,從而衍生出“撥糊盆”這種水上游戲。“撥糊盆”之盆多髹漆裝飾,兼有美觀防腐與疏水提速的作用。