空泡水洞中拖式吊艙推進器脈動壓力測量及空泡觀測
2012-03-07 06:22:16盛立熊鷹王松
艦船科學技術 2012年2期
關鍵詞:測量
盛立,熊鷹,王松
(海軍工程大學船舶與海洋工程系,湖北武漢 430033)
0 引言
吊艙推進器是近年來發展起來的一種新型船舶電力推進系統,主要由支架、吊艙和螺旋槳等部件構成。其中,吊艙通過支架懸掛在船體下面。由于吊艙推進器具有體積小、重量輕、附加阻力小、效率高和空泡性能更佳等優點[1],其應用范圍越來越廣泛,其試驗技術研究也日漸為造船界所重視,第23屆國際水池會議(ITTC)推進委員會[2-3]首次提出吊艙推進器模型試驗及性能預報規程,第24屆ITTC吊艙推進器專家委員會[4]提出了試驗及性能預報、空泡試驗2個規程,第25屆ITTC吊艙推進器專家委員會[5]明確提出將螺旋槳與吊艙作為一個推進器單元處理的建議,對試驗及性能預報規程的部分細節進行了改進,并提出簡化的吊艙阻力預報方法;在歐洲還成立專門研究吊艙推進器的T-POD委員會[6],專門研究吊艙推進器相關的水動力學問題、動力分配、螺旋槳設計以及動力性能評估和試驗等問題。吊艙推進器的研究主要有對吊艙推進器性能的數值模擬、吊艙推進器設計技術以及吊艙推進器的試驗技術,針對吊艙推進器的試驗技術,國內外的一些學者相繼開展了一系列的研究[7-18]。
本文利用空泡水洞以及H101動力儀對吊艙推進器空泡性能和脈動壓力進行試驗研究,觀察槳模在不同工況下的葉背和葉面的空泡發展和變化情況,并用人工觀察和拍照的方式進行記錄,同時通過螺旋槳正上方區域安裝的脈動壓力傳感器測量脈動壓力,并對試驗結果進行詳細分析,為吊艙推進器性能研究及設計提供參考。
1 試驗模型及試驗裝置
1.1 試驗模型
吊艙推進器由艙體、支架、尾鰭、槳轂、轂帽以及五葉螺旋槳組成。吊艙模型縮尺比為1:13.64,槳模直徑為0.22 m。吊艙具體參數見表1,模型照片見圖1。
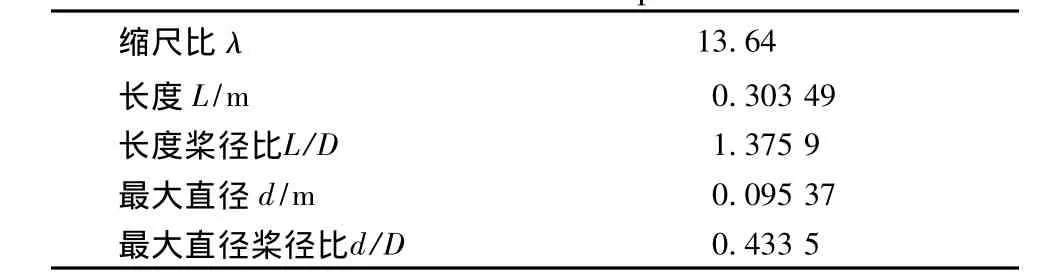
表1 吊艙模型參數Tab.1Parameters of pod model
圖1 吊艙模型Fig.1Pod model for test
螺旋槳模型采用黃銅制作,模型主要參數見表2,模型照片如圖2。螺旋槳導流帽按實槳形式縮比加工。
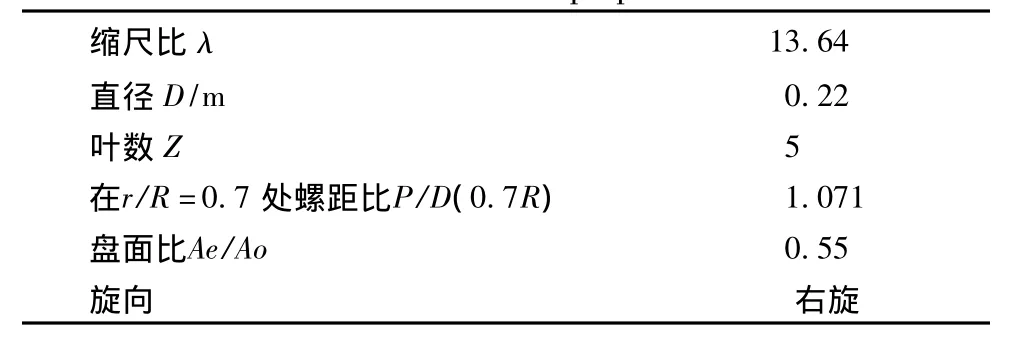
表2 螺旋槳模型主參數Tab.2Parameters of propeller model

圖2 螺旋槳模型Fig.2Propeller model for test
1.2 試驗裝置
試驗工作段尺寸為0.6 m×0.6 m×2.6 m。空泡水洞流速采用比托管進行測量。
H101動力儀和單分力天平:H101動力儀是Cussons公司專門針對吊艙推進器水動力性能測試而新開發的先進測試儀器,能對雙槳吊艙推進器在不同舵角下前槳和后槳的推力和扭矩以及吊艙上的阻力進行測量。它主要由螺旋槳動力儀和單分力天平組成。
在螺旋槳正上方區域埋置1個脈動壓力傳感器,傳感器受壓面直徑為8 mm,且與所處平面齊平[19]。傳感器位于槳盤面中心的正上方167 mm(見圖3)。

圖3 脈動壓力傳感器位置圖Fig.3Location of fluctuating pressure sensor
2 試驗方法和試驗工況
2.1 試驗方法和內容
1)常壓狀態
在空泡水洞中,在試驗設備和模型強度允許的范圍內,確定槳模的轉速、水洞工作段進速。在每個給定工況下,按試驗規程,觀察槳模的空泡形態,測量和分析脈動壓力。
2)抽空狀態
選定對應吊艙推進器在不同進速下的工況,對水洞進行抽空,按試驗規程,觀察槳模的空泡形態,測量和分析脈動壓力。
2.2 試驗方案和工況
根據每個來流速度下的推力扭矩系數和轉速空泡數、模型試驗時的槳模轉速和工作段進速及壓力,調節空泡水洞水速及螺旋槳轉速并達到穩定的試驗工況后,進行以下測量。
1)脈動壓力
首先標定各脈動壓力傳感器的靈敏度系數,然后測試各工況下螺旋槳模型誘導的脈動壓力,得到脈動壓力系數,并換算到實槳的脈動壓力值。
試驗時,測量到的脈動壓力時域信號p~經FFT得到以螺旋槳葉頻為基頻及其諧頻的各階幅值(單幅值)pi,和以一指定槳葉葉梢位于正上方位置為參考角度的各階相位角φi,

各階幅值以無量綱系數Kpi表示,

2)空泡觀察
螺旋槳葉片上出現空泡后,畫出在相應半徑不同周向角度上的空泡區域、空泡形態。空泡數定義如下:

式中:D為實槳的直徑,m;n為實槳轉速,1/s;pv為試驗用水的飽和蒸氣壓,Pa;po為循環水槽工作段中心處壓力,Pa。
主要是在以下6個具體工況觀測空泡(見表3)。
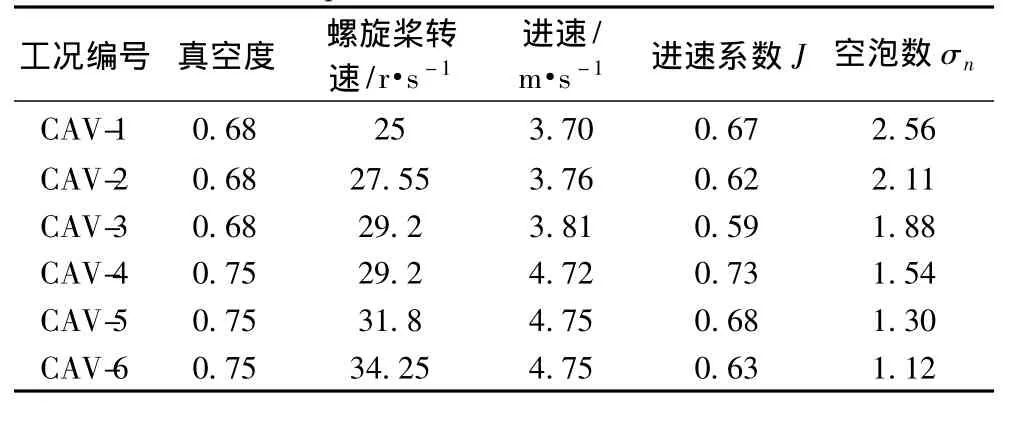
表3 觀測空泡具體工況表Tab.3The specific conditions of vacuoles observed
3 試驗結果和分析
3.1 脈動壓力試驗結果
模擬吊艙推進器模型在進速系數為J=0.60~1.12的工況。在各工況下分別測量螺旋槳上方的脈動壓力,對測量得到的壓力時域信號進行傅立葉分析后,發現一階葉頻脈動壓力和二階脈動壓力幅值比較明顯,3階以上的葉頻脈動壓力幅值很小,不容易識別。各工況下得到的一階和二階葉頻脈動壓力幅值見表4,相應的脈動壓力系數與脈動壓力幅值見圖4和圖5。
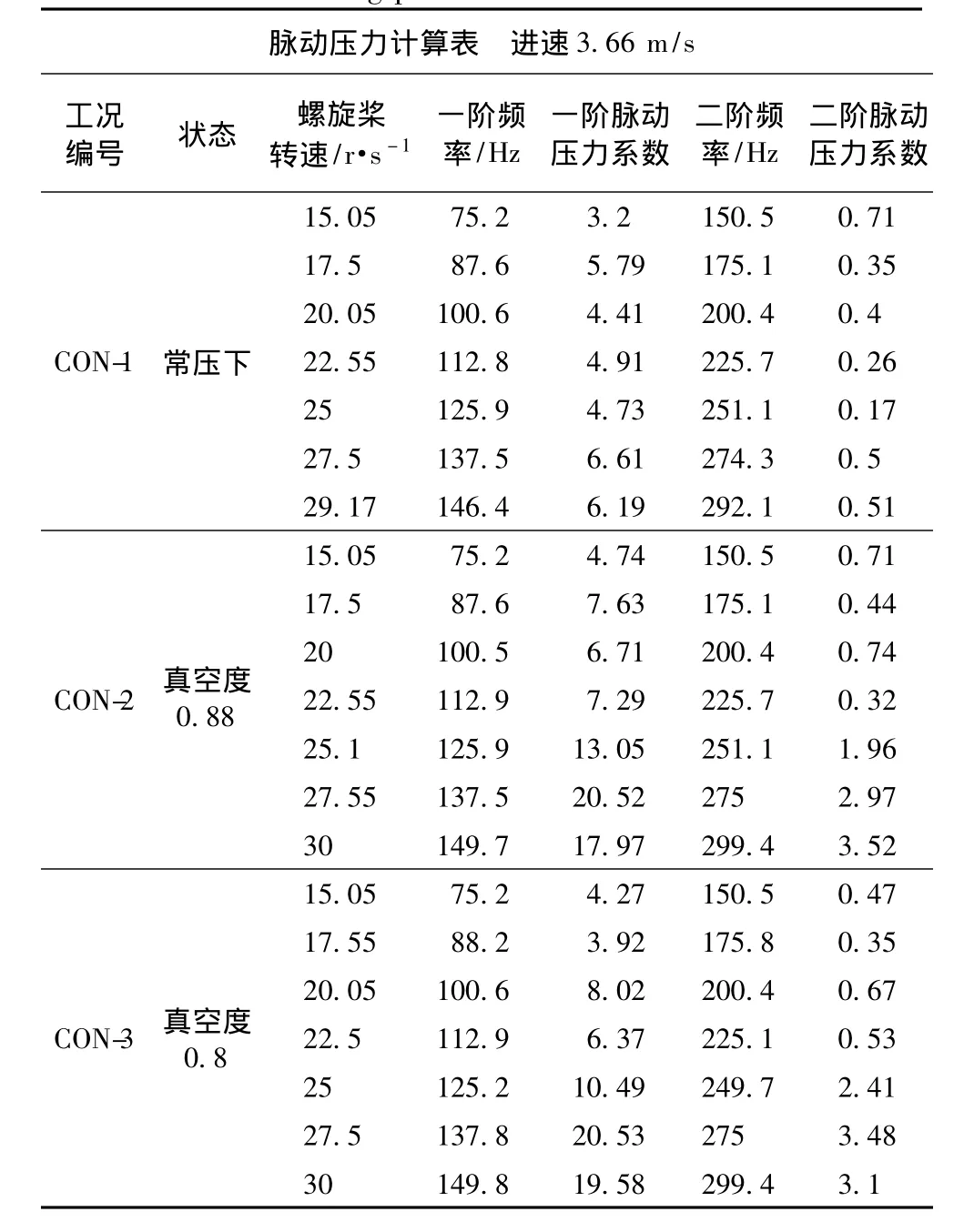
表4 不同工況下的脈動壓力Tab.4Fluctuating pressure under different conditions

從表4及圖4和圖5可以看出:
1)隨著轉速的增加,在常壓下,一階脈動壓力系數和二階脈動壓力系數變化不明顯;在抽真空狀態下,螺旋槳轉速在900~1 350 r/min情況下脈動壓力系數變化也不明顯,但當轉速達到1 500 r/min,即葉頻超過125 Hz時,脈動壓力系數出現明顯增大。這主要是因為在常壓下,模型槳在所測量的整個轉速范圍內均不會發生片空泡,所以在整個轉速范圍內脈動壓力系數隨轉速的變化不明顯;在抽真空狀態下,低轉速時片空泡還未形成,或面積很小,此時脈動壓力主要是由于螺旋槳非定常負荷引起的,所以脈動壓力系數增加不明顯,高轉速時,空泡范圍開始明顯增加,這時空泡體積脈動引起的脈動壓力急劇增加,明顯超過螺旋槳負荷引起的脈動壓力,從而引起脈動壓力系數急劇增加。
2)在不同真空度條件下,每一工況一階脈動壓力幅值均比二階脈動壓力幅值大,但抽真空條件高轉速(空泡范圍較大)時,二階脈動壓力幅值相對一階的比值較大,而在空泡不明顯的工況下,兩者的比值很小。這主要是因為空泡不明顯時,脈動壓力主要是槳葉負荷引起的,對五葉槳而言,螺旋槳負荷的變化主要是5n階伴流系數的,由于脈動壓力的變化和5n階伴流系數是一致的,10階伴流分數比5階伴流分數小得多,此時二階葉頻脈動壓力幅值就非常小;而發生大面積空泡后,空泡體積的變化并非只決定于槳5n階伴流系數,空泡體積的變化規律和5n階伴流系數的一致性變弱,此時二階葉頻脈動壓力系數和一階脈動壓力系數的比值就會增加。
由于時間問題,本次脈動壓力測量試驗只用了1個傳感器測量脈動壓力,還要進一步圍繞這個中心點的周圍布置數個傳感器,以便更加系統準確地測量螺旋槳的脈動壓力。
3.2 空泡觀察
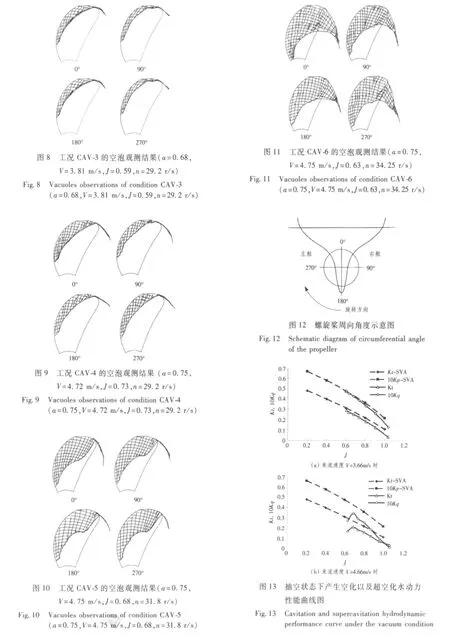
1)吊艙推進器模型在CAV-1~CAV-6六個具體工況條件下,螺旋槳模型在周向角度0°,90°,180°,270°狀態下的空泡形態見圖6~圖11(a表示真空度;V表示進速;J表示進速系數;n表示螺旋槳轉速)。葉片周向角度定義見圖12。
2)當來流速度為3.59 m/s,螺旋槳轉速1 350 r/min,以及來流速度4.75 m/s,螺旋槳轉速1 600 r/min時,位于半徑r/R=0.5~1.0靠近導邊處出現葉背片空泡,且局部片空泡不穩定。
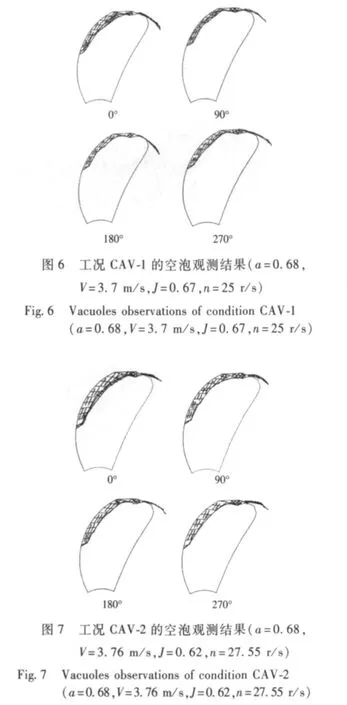
3)在螺旋槳轉速進一步提高時,葉背空泡覆蓋葉片面積逐漸增大,在r/R=0.5~1.0之間葉背有泡空泡,會有導致螺旋槳表面剝蝕的危險。在工況CAV-6下,能觀察到很明顯的超空化[20-21]現象,此時螺旋槳的推力扭矩呈現下降趨勢。
4)由于來流比較均勻,不同角度空泡范圍變化不大,僅在0°附近空泡范圍稍大,這主要是由于吊艙支柱對螺旋槳盤面處在0°附近的阻塞作用最大。通過對推力和扭矩的測量,發現在工況CAV-5和CAV-6時,推力系數和扭矩系數比相同進速系數下無空泡條件測量的結果有明顯降低,說明由于空泡覆蓋面積較大,導致螺旋槳的水動力性能惡化。水動力性能表如圖13所示。其中虛線為德國波茨坦水池試驗數據[18],實線為產生抽空狀況下吊艙推進器水動力性能的測量值。
4 結語
隨著轉速的增加,在常壓下,一階脈動壓力系數和二階脈動壓力系數變化不明顯;在抽真空狀態下,螺旋槳轉速較低時脈動壓力系數變化也不明顯,但當螺旋槳轉速達到1 500 r/min,即脈動頻率超過125 Hz時,抽空狀態下的螺旋槳的脈動壓力系數出現明顯增大。這主要是因為在常壓下,模型槳在所測量的整個轉速范圍內均不會發生片空泡,所以在整個轉速范圍內脈動壓力系數隨轉速的變化不明顯;在抽真空狀態下,低轉速時片空泡還未形成,或面積很小,此時脈動壓力主要是由于螺旋槳非定常負荷引起的,所以脈動壓力系數增加不明顯,高轉速時,空泡范圍開始明顯增加,這時空泡體積脈動引起的脈動壓力急劇增加,甚至明顯超過螺旋槳負荷引起的脈動壓力,從而引起脈動壓力系數急劇增加。
通過空泡觀測試驗發現,由于來流比較均勻,不同角度空泡范圍變化不大,僅在0°附近空泡范圍稍大,這主要是由于吊艙支柱對螺旋槳盤面處在0°附近的阻塞作用最大。在螺旋槳轉速進一步提高時,葉背空泡覆蓋葉片面積逐漸增大,在r/R=0.5~1.0之間葉背有泡空泡,會有導致螺旋槳表面剝蝕的危險。通過對推力和扭矩的測量,發現在發生大面積空泡時,推力系數和扭矩系數相比相同進速系數下無空泡條件測量的試驗數據明顯降低,說明由于空泡覆蓋面積較大,導致螺旋槳的水動力性能惡化。
[1]熊鷹,葉金銘.吊艙推進系統性能評估和設計方法[J].海軍工程大學學報,2002,14(1):23-26.
[2]THE Propulsion Committee.FinalReportand Recommendations to the 23rdITTC[R].Proceeding of 23rd ITTC,2002.
[3]Poded Propulsor TestsandExtrapodation[R].ITTC Recommended Procedures,Proceedings of the 23nd ITTC,2002.
[4]The Specialist Committee on Azimuthing Poded Propulsion[R].Final Report and Recommendations to the 24thITTCVolumeⅡ,2005.
[5]The Specialist Committee on Azimuthing Poded Propulsion[R].Final Report and Recommendations to the 25thITTCVolumeⅡ,2008.
[6]The Propulsion Committee[R].FinalReportand Recommendations to the 24thITTC,Proceedings of the 24thITTC-VolumeⅠ,2005.
[7]ISLAM M F,VEITCH B,LIU P.Experimental Research on MarinePodedPropulsors[A].Proceedingsof7thInternational Conference on Mechanical Engineering ICMEABS-167,DHAKA,2007.
[8]ISLAM M F,VEITCH B,AKINTURK A,et al.Experiments with poded propulsors in static azimuthing condition 2007a[A].8thCMHSC,NL,St Jone's,Canada,2007.
[9]ISLAM M F,VEITCH B,AKINTURK A,et al.Experiments with poded propulsors in static azimuthing condition 2007b[A].8thCMHSC,NL,St Jone's,Canada,2007.
[10]WANG D,ATLAR M,GLOVER E J,et al.Experimental investigation of flow field around a poded propulsor using LDA[A].Proceedings of the first International Conference on Technological Advances in Poded Propulsion[C].UK: University of Newcastle,2004.483-498.
[11]JOHANNSEN C,KOOP K H.Cavitation tests for two fast ferries with pod-driver carried out in HSVA'large cavitation tunnel HYKAT[A].2ndT-POD Conference,France: University of Brest,2006.
[12]ALLENSTORM B,ROSENDHALT.Experiencefrom testing of pod units in SSPA's large cavitation tunnel[A].2ndT-POD Conference,France:University of Brest,2006.
[13]HEINKE H J.Investigation about the forces and moments at poded drives[A].Proceedings of the first International Conference on Technological Advances in Poded Propulsion[C].UK:University of Newcastle,2004,305-320.
[14]FRIESCH J.Investigation of poded drives in a large cavitation tunnel[A].Proceedings of PRADS 2001[C].Shanghai,2001.749-756.
[15]FRIESCH J.Cavitation and vibration investigations for poded drives[A].Proceedings of the first International Conference on Technological Advances in Poded Propulsion[C].UK:University of Newcastle,2004,387-399.
[16]楊晨俊,錢正芳,馬騁.吊艙對螺旋槳水動力性能的影響[J].上海交通大學學報,2003,37(8),1229-1233.
[17]曹梅亮,王根祿,朱鳴.吊艙式推進裝置水動力性能試驗研究[J].上海交通大學學報,2003,37(8),1198-1200.
[18]王松,盛立.吊艙推進器敞水性能試驗的不確定度分析研究[A].中國船舶工業行業協會.第十五屆中國國際高性能船學術會議論文集[C].中國,上海:中國船舶工業行業協會船艇分會,2010.C41.1-11.
[19]熊鷹,葉金銘,等.螺旋槳空泡及其誘導的脈動壓力的數值和試驗研究[J].船舶力學,2006,(2):19-24.
[20]賈力平,于開平,張嘉鐘,等.空化器參數對超空泡形成和發展的影響[J].力學學報,2007,(43):37-46.
[21]王海斌,王聰,魏英杰,等.水下航行體通氣超空泡的實驗研究[J].船舶力學,2007,(27):73-76.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
