二階多智能體系統的有限時間收斂的一致性控制
2012-03-16 06:20:18喬光耀
電子測試 2012年6期
喬光耀
(南京郵電大學 自動化學院, 江蘇南京 210046)
0 引言
近幾年來,隨著計算機技術、網絡技術和通信技術的迅速發展,人們對基于多智能體系統的一致性控制的研究越來越多。多智能體系統在無人駕駛飛行器的編隊控制、衛星的姿態控制、通信網絡的擁塞控制等領域的廣泛應用,推動著多智能體系統建模與分析的研究逐步深入。眾所周知,目前在控制領域對多智能體的一致性控制的研究越來越多[1-4]。二階多智能體系統在現實生活中具有重要的應用意義。Suiyang[5]等人提出了一種新的有限時間多面滑模觀測器,最終通過誤差觀測器證明了多智能體網絡的有限時間收斂的跟蹤可以達到一個新的終端滑模面,來實現有限時間收斂。Bo Liu等人[6]建立了相同網絡拓撲吸引,不同網絡拓撲排斥的模型,實現了在耦合拓撲的吸引與排斥兩種情況下的有限時間收斂。Feng Xiao等人[7]提出了分布式虛擬現實技術的設計,并利用李雅譜諾夫時間限定理論和代數圖理論,實現了有限時間收斂。但是大多數的研究都是基于一階多智能體網絡進行研究的,而對二階多智能體的研究則較為少見。但是二階多智能體在現實生活中具有重要的應用意義。例如水下機器人,無人駕駛飛機都是二階多智能體的模型。
本文針對二階多智能體系統,基于領導-跟隨模式,采用Lyapunov時間穩定性定理,給出了二階多智能體系統有限時間收斂的條件,并且針對理論結果進行了MATLAB仿真,驗證了理論結果的正確性。
1 問題的描述
假設有一個多智能體網絡,具有一個領導者,n個跟隨者,其中的每一個智能體都是一個二階系統。網絡的拓撲圖為固定的無向強連通圖。其中領導者和跟隨者的動力學表達式如下:
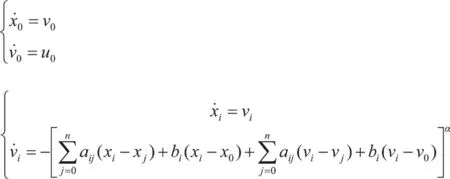
其中x0, v0, u0分別表示領導者的位置,速度與加速度狀態。而xi, yi則表示跟隨者的位置與速度狀態。采用如下誤差控制算法:

其中α是常數且0<α<1,x0為一時變函數。aij, i, j=1, 2,…, n是鄰接矩陣A中的第(i,j)個元素。如果領導者與跟隨者i之間存在信息傳遞,那么aij>0, i=1, 2, …, n否則,aij=0。
2 算法描述
引理1[8]對于向量B=[b1, b2,…,bn]T≥0, B≠0,如果無向圖G連通,那么矩陣L(A)+diag(B)是正定的。

3 算法證明
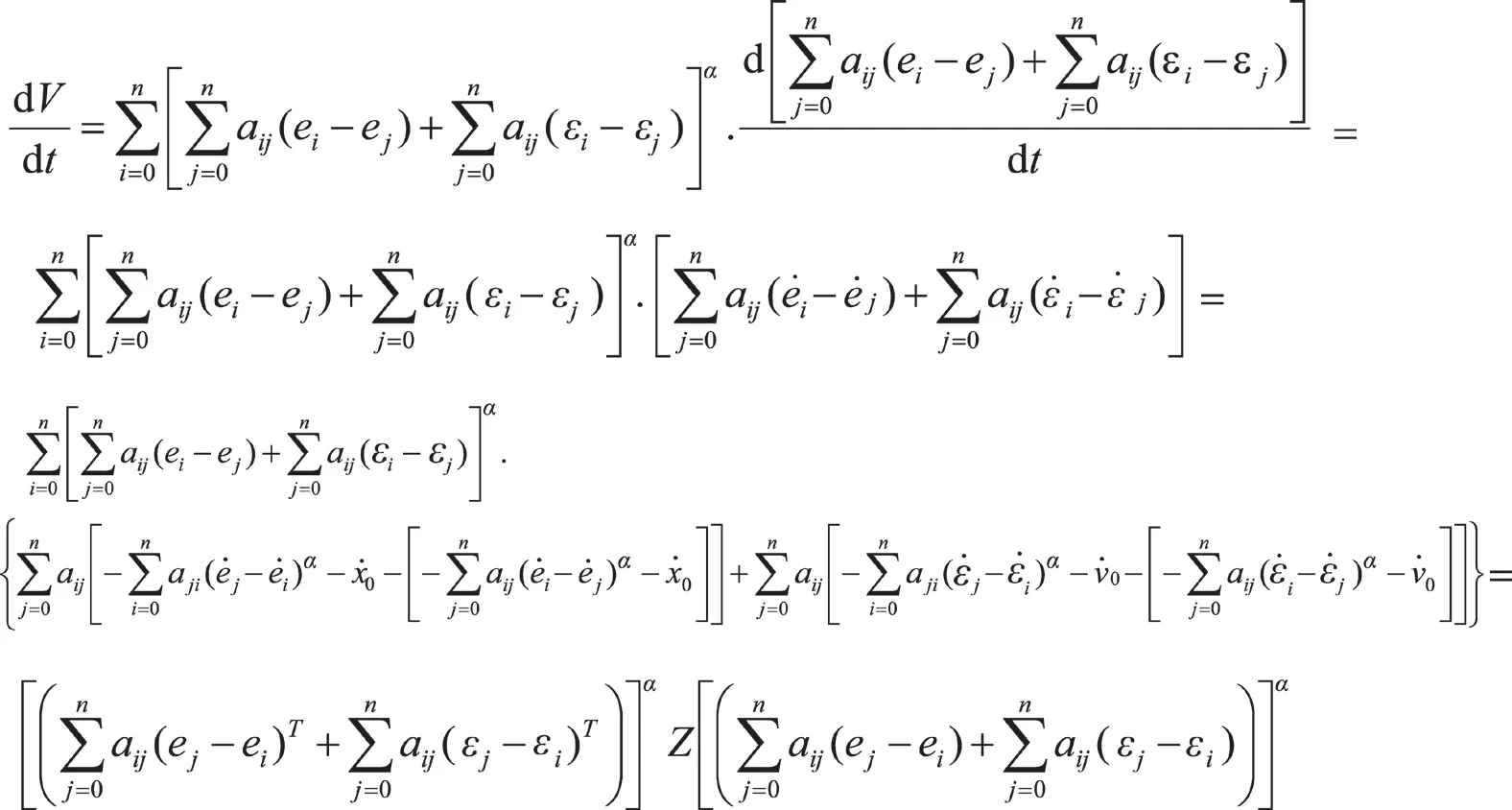

其中:


綜合以上分析計算得到:

通過上述分析可以得知,該算法滿足Lyapunov穩定性定理,能夠在有限的時間里實現一致性收斂。
4 仿真結果
假設系統中有一個領導者L0和4個跟隨者F1-F4,其通信拓撲結構圖如圖1所示。當智能體j在智能體i的鄰域內,其鄰接矩陣中的元素aij=1,否則aij=0。
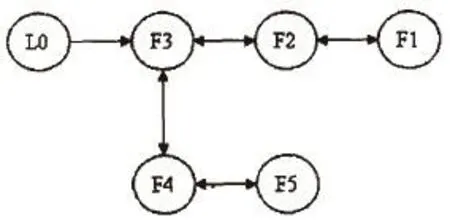
圖1 仿真通信拓撲結構圖
以圖1的網絡拓撲結構進行理論仿真,其仿真結果結果如圖2所示。
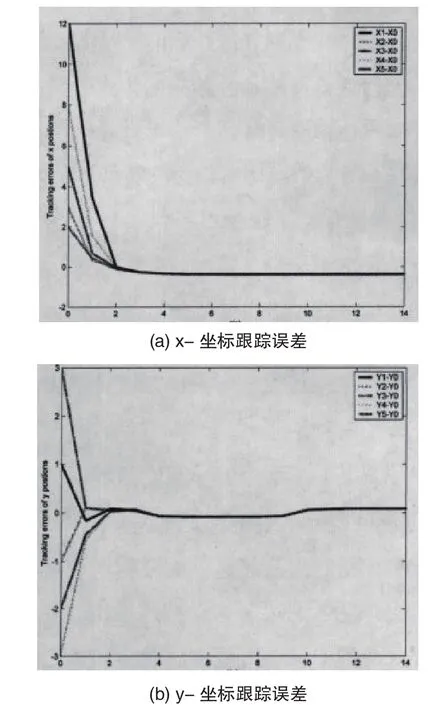
圖2 仿真結果
5 小結
通過仿真結果可以得出下面結論:只要系統的網絡拓撲圖保持強連通,系統中的跟隨者都會在一定的時間內與領導者的狀態達到一致性,也就是該系統在一定的時間內實現了一致性收斂。本文的下一步工作將對時延系統的有限時間收斂的一致性控制進行研究。
[1] Vicsek T, Cziroo′k A, Ben-Jacob E, Cohen I,Shochet O.Novel type of phase transition in a system of self-deriven particles[J].Physical Review Letter,1995,75(6):1226-1229.
[2] Jadbabaie A, Lin J, and Morse A S. Coordination of groups of mobile autonomous agents using nearest neighbor rules[J].IEEE Transactions Automatic Control,2003,48(6):988-1001.
[3] Olfati-Saber R and Murray R M.Consensus problems in networks of agents with switching topology and time-delays[J].IEEE Transactions Automatic Control,2004,49(9):1520-1533.
[4] Fax J A.Optimal and cooperative control of vehicle formations[R].Pasadena,CA:Control Dynamical System,California Institute of Technology,2001.
[5] Suiyang,Khoo,Lihua,xie,Zhihong Man,Shengkui Zhao.Observer-based Robust Finite-time Cooperative Consensus Control for Multiagent Networks[J].Industrial Electronics and Applications,2009,30(6):1883-1888.
[6] Bo Liu,Xinmao Zhu,Jie Zhang,Yue Sun. Consensus of Multi-agent Systems Based on Leader-following Control[C].Natural Computation (ICNC), 2010 Sixth International Conference on ,2010 :1366-1370.
[7] Feng Xiao, Long Wang, Jie Chen.General Distributed Protocols for Finite-Time Consensus of Multi-Agent Systems, Decision and Control[C].2009 held jointly with the 2009 28th Chinese Control Conference,2009: 4741-4746.
[8] Wang L,Xiao F.Finit-time consensus problems for networks of dynamic angents. arXiv:math/0701724ml.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
