一種交流伺服系統硬件平臺設計
2012-03-20 02:23:36劉斌劉仲曄陳瑜
船電技術 2012年7期
劉斌 劉仲曄 陳瑜
(1. 中國船舶重工集團公司第七一二研究所,武漢 430064;2. 海軍駐湖南地區軍事代表室,湖南湘潭411101;3. 海軍駐武漢719所軍事代表室, 武漢 4300643)
0 引言
永磁交流伺服系統具備十分優良的低速性能,適應了高性能伺服驅動的要求;并且隨著永磁材料性能的大幅度提高和價格的降低,在工業生產自動化領域和國防軍事裝備中將得到越來越廣泛的應用,目前已成為交流伺服系統的主流[1],而構建硬件實驗平臺是檢驗設計的控制算法應用于交流伺服系統實際效果的重要保證。
1 DSP芯片的選擇與設計
可編程DSP芯片的開發需要一整套完善的軟、硬件開發工具。通常,DSP芯片的開發工具可以分為代碼生成工具和代碼調試工具。代碼生成工具的作用是將C語言、匯編語言或者兩者呼喝編寫的DSP程序編譯、匯編并鏈接成為可執行程序。代碼生成工具主要包括:C編譯器、匯編器和鏈接器。此外還有一些輔助工具,如文件格式轉換程序、庫生成和文檔管理程序等。代碼調試工具的作用是對DSP程序及系統進行調試,使之能夠達到設計目標。TMS320系列DSP芯片的系統集成和調試工具主要有:C/匯編語言源碼調試器、初學者工具DSK(Designer Starter Kit)、軟件模擬器(Simulator)、評估模塊EVM(Evaluation Module)、軟件開發系統SWDS(Software Developing System)和仿真器XDS(eXtended Developing System)等。
1.1 TMS320LF2407芯片簡介[2]
TMS320LF2407是TI公司專門為電機控制設計的DSP定點運算芯片,當外掛晶振為10 MHz,內部鎖相環兩倍倍頻時,單步指令周期為50 ns,其處理速度能夠滿足高頻控制的要求。另外,TMS320F2407不僅提供了較強的計算能力,而且針對電機提供了專門用于電機驅動的外設。TMS320F2407內部采用哈弗結構,流水線作業,每個指令周期僅為50ns,并且由于TMS320F2407內部具有硬件乘法器,一個1616×位的乘法在一個指令周期便可實現,因此處理速度比其他單片機快速許多。TMS320LF2407主要具有下述功能部件:20MIPS的CPU,片內RAM/ROM/FLASH,專用于電機控制的“事件管理器(Event Manager)”和片內外設。其結構見圖1。
Ⅰ16路A/D變換器、轉換速度500 ns。在系統中,速度給定環節,電流檢測環節均用到A/D采樣,其中速度給定環節給定模擬量一路,實時讀入給定值;電流檢測環節4路,實時讀入電流值。
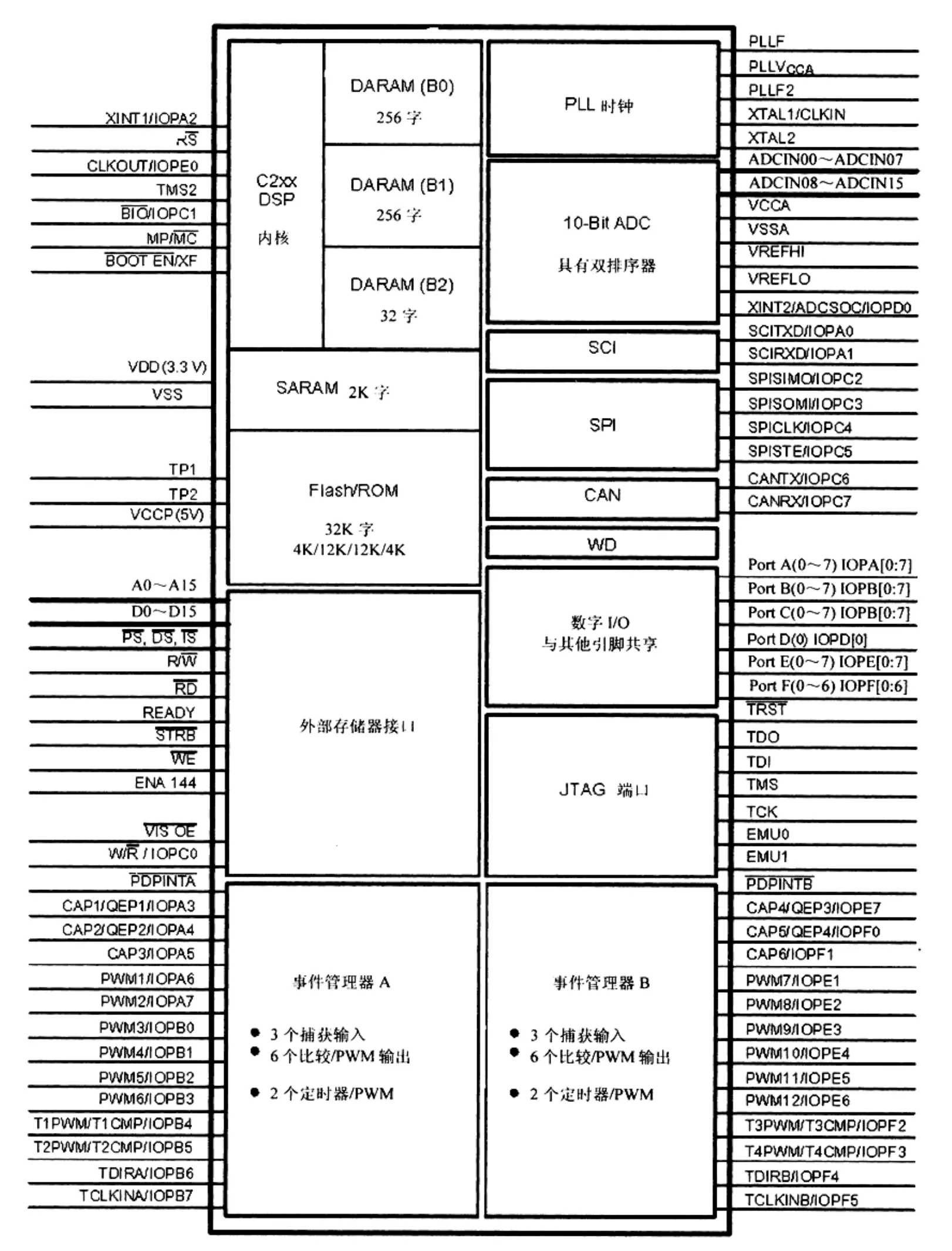
圖1 TMS320F2407A DSP結構示意圖
Ⅱ 9路PWM輸出、頻率可編程10~200 kHz。對于方波永磁同步電機控制的核心思想就是PWM電流斬波控制,本系統采用了它的三個全比較單元,產生了6路非對稱PWM波形信號,頻率根據IGBT模塊的參數選為10 kHz。
Ⅲ 4路高速捕獲單元(CAP)。對于方波永磁同步電機,當采用有位置傳感器的控制策略時,3路軸角編碼信號的檢測要求高速準確,而一般單片機的中斷資源和響應速度都無法滿足要求。選用TMS320LF240的4路高速單元的3路,就可以輕松完成軸角編碼信號上下跳變的檢測和響應[3]。
TMS320LF2407A DSP是基于320C2xLP核。C2xLP核具有4級流水,工作在40MHz。具有JTAG仿真模塊。C2xLP有一個中心算術邏輯單元(CALU),及32-bit的累加器(Acc)。Acc也是CALU的一個輸入。Acc的其他輸入包括16316-bit的乘法器通過定標移位器,以及輸入數據定標移位器。軟件可以通過進位旋轉Acc的內容,來實施位操作和測試。
TMS320LF2407A芯片可以采用匯編語言開發,也可以采用C語言,C語言程序簡潔、對于復雜的算法和浮點數運算有著匯編語言不可比擬的優越性,TI公司提供了比較好的C語言開發編譯環境,其編譯效率很高,本課題采用C語言開發。
TI的Code Composer4. 10是一個集成的開發環境,支持編輯、建立、調試、分析和項目管理。這個價值為1995美元的開發環境包括ANSI C編譯器、匯編器、連接器、軟仿真器、實時分析器,數據是可視化的。TI的仿真器支持JTAG非插入式的邊界掃描仿真。該公司也分別提供C編譯器、匯編器、連接器、軟仿真器、實時分析器和應用程序庫。第三方可以提供評估模塊、仿真器、以及應用算法[4]。
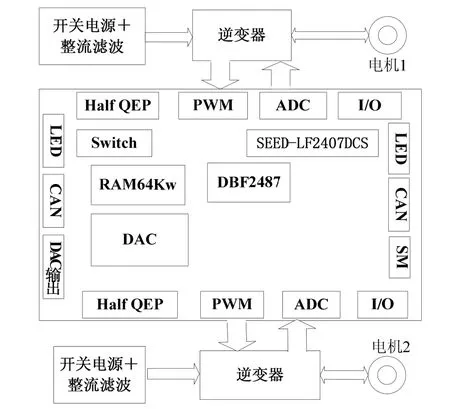
圖2 SEED-LF2407DCS電機控制板
1.2 SEED-LF2407電機控制板
DCS2407A應用開發平臺是以數字信號處理器TMS320LLF2407A為核心的應用開發平臺,支持C240X系列的DSP控制器開發。DSC2407提供了非常完整的C240X應用開發的外圍設備接口設計,并根據工業控制需要,提供了專業級的運動控制接口,為優化數字式馬達控制器及其它數字式功率控制提供了極其便利的應用開發環境[5]。
2 DSP外圍電路設計
DSP芯片采用64腳QFP封裝,和計算機用JTAG接口連接,可以實現在線仿真和程序升級,也可以通過DSP芯片的調試軟件進行板上資源的監測。
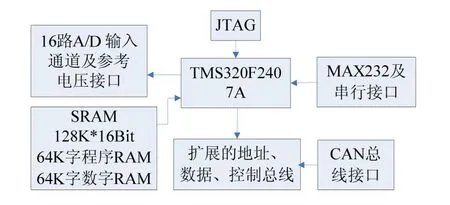
圖3 DSP外圍電路框圖
靜態RAM空間主要作為程序存儲器和數據存儲器,當系統處于仿真狀態下,可將程序通過JTAG鏈下載到程序存儲RAM中,然后執行。實際運行時,先將程序通過燒寫軟件下載到片內FLASH存儲器上,然后通過跳線選擇,將程序空間指向片內FLASHROM,這樣就可以實時運行了。
另外,為了指示電機的姿態,便于系統的調試,外圍電路還設計了一組信號燈和一組微動開關,作為DSP的擴展I/O空間。8個指示燈占用了F240的I/O存貯區的000Ch地址,數據線Bit0-Bit7的狀態可用指示燈的亮暗來表示,置1為ON,清0為OFF;10個開關占用F240的I/O存貯區0008h地址空間。
寫 I/O 信 號燈狀態時采用:
OUT LED_STATUS,00Ch;
將STATUS寄存器的值寫到000Ch。
讀 I/O DIP開關狀態時采用:
IN SW_STATUS,008h;
讀0008h值,并存放到SW_STATUS寄存器中。
3 隔離保護電路設計
在DSP控制器和IGBT之間,因為DSP是弱電部分,電壓為5V,它驅動IGBT時信號不能直接加在引腳上。這時為了更好的匹配兩者,使用了光電耦合器,光電耦合器是連接控制信號和IGBT模塊的橋梁,其性能的好壞直接影響到控制品質的優劣。因此選用日本 TOSHIBA的高速精密線形光耦-TLP559。TLP559高速精密線形光耦合器由一個紅外光 LED照射分叉配置的一個隔離反饋二極管和一個輸出光二極管組成。反饋光二極管吸收 LED光通量的一個部分而產生控制信號,該信號可用來調節LED的驅動電流,本文設計了6個光耦。其主要特點如下:
交流或直流信號的耦合;
帶寬>200 kHz;
高傳輸增益穩定性±0.05%;
3500 V峰值隔離電壓;
TLP559芯片的引腳和原理圖如圖 4所示。TLP559光耦芯片在電路中的應用如圖5所示。
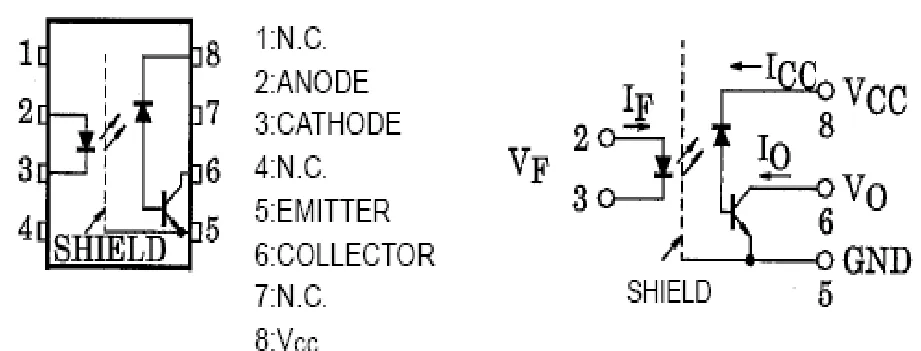
圖4 TLP559芯片的引腳說明
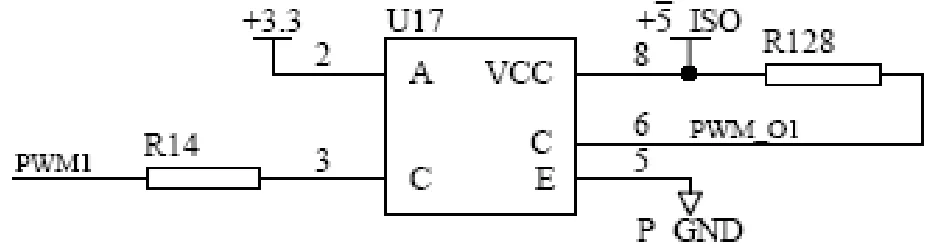
圖5 TLP559光耦芯片應用
4 逆變驅動電路設計
所謂逆變,就是將直流變成交流的過程。在此系統上集成了整流濾波模塊、逆變驅動模塊和各種電流、電壓反饋[6]。其功能如下:
(a)能和SEED DCS2407A馬達控制模塊連接,構成完整的數字馬達控制系統的應用開發平臺;
(b)適用于三相交流異步電動機,永磁同步電機,直流無刷電機(BLDC)以及開關磁阻電機的控制和調速;
(c)額定350VDC的母線電壓;
(d)額定電流10安培和最大值15A;
(e)輸入為220V/50Hz交流電壓;
(f)PFC反饋及控制模塊;
(e)相電流采樣及放大反饋;
(f)母線電壓、電流反饋;
(g)過流保護和報警電路;
(h)自動死區保護。
系統如圖6所示:
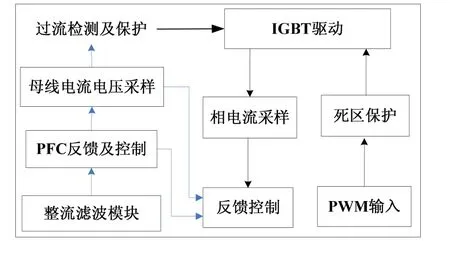
圖6 功率電路框圖
5 結論
本文介紹了基于TMS320LF2407DSP的交流伺服系統的硬件平臺系統,主要介紹了其中幾個主要的功能模塊,為控制算法的實驗驗證工作提供了可靠的硬件基礎。
[1] 蘇彥民, 李宏.交流調速系統的控制策略[M]. 機械工業出版社, 1998.
[2] 杜雋隆.微型計算機控制系統-工程設計與實現[M].西安:西北工業大學出版社, 1992, 105-119.
[3] 陳榮, 鄧智泉. 永磁伺服系統控制方案選擇[J]. 鹽城工學院學報(自然科學版), 2003, 16(2): 5-9.
[4] 陳艷峰, 丘水生. MATLAB與PSPICE相結合用于開關功率變換器仿真的方法[J]. 電機與控制學報,1999(2): 177-179.
[5] Chern T L, Wu Y C.Design of brushless DC position servo systems using integral variable structure approach[J].IEE Proceedings-B, 1993, 140(1): 27-34.
[6] 田淳, 胡育文. 永磁同步電機直接轉矩控制系統理論及控制方案的研究[J]. 電機技術學報, 2002(1):7-11.
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
今日農業(2021年14期)2021-10-14 08:35:28
海峽姐妹(2020年8期)2020-08-25 09:30:18
人大建設(2019年12期)2019-05-21 02:55:44
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46