基于聲學風洞的麥克風陣列測試技術應用研究
2012-04-17 10:35:50陳正武王勛年李征初劉志濤崔紅芳
實驗流體力學 2012年3期
關鍵詞:數據處理
陳正武,王勛年,李征初,劉志濤,崔紅芳
(中國空氣動力研究與發展中心空氣動力學國家重點實驗室,四川綿陽 621000)
0 引 言
隨著航空運輸業的高速發展,民用飛機數量的劇增,大型客機噪聲污染問題已經引起世界范圍內的關注。大型客機噪聲源主要包括發動機噪聲和增升裝置、起落架等機體噪聲。近年來,由于大涵道比渦輪風扇發動機及其發動機降噪研究成果的實際應用,發動機噪聲已經明顯降低,特別是在大型客機起飛和降落階段,機體噪聲已經取代了發動機噪聲成為大型客機主要噪聲源。因此大型客機機體噪聲降噪研究已經成為目前國際氣動噪聲研究領域的熱點研究問題。
聲學風洞為大型客機氣動噪聲研究提供了一種有效的研究平臺。為有效地評估大型客機機體噪聲的影響,指導大型客機降噪研究,需要針對聲學風洞的特點,發展一種有效的噪聲測試技術,準確測量大型客機機體噪聲源的分布。
近年來從無線電、雷達等信息領域發展起來的麥克風陣列測試技術能準確地識別噪聲產生的區域以及量化噪聲的強度,已經成為現代聲學測量的關鍵測試設備。麥克風陣列由一定數量的麥克風傳感器組成,根據麥克風傳感器到掃描點的距離不同,利用各個麥克風間的聲音信號振幅和相位的關系,采用“延遲求和”算法[1-2]實現聲源的定位。一直以來,由于數據采集設備和計算機水平限制,麥克風陣列所用麥克風數量受到限制,其分辨率和信噪比都比較低,麥克風陣列一直沒得到廣泛應用。近年來,由于計算機的飛速進步以及數采設備的快速發展,采用多通道麥克風陣列能有效克服分辨率低和信噪比低的缺點。麥克風陣列測試技術已經成為現代飛行器氣動噪聲試驗研究過程中最有效的聲學測試技術。
為了將麥克風陣列測試技術用于聲學風洞試驗研究,針對中國空氣動力研究與發展中心0.55m× 0.4m聲學風洞的特點,介紹一種基于聲學風洞的麥克風陣列應用技術。并采用36通道的螺旋型麥克風陣列進行試驗驗證。最后還測量NACA23018翼型的氣動噪聲源分布,研究其噪聲特性。
1 試驗設備和儀器
1.1 0.55m×0.4m聲學風洞
試驗在0.55m×0.4m聲學風洞進行,如圖1所示。0.55m×0.4m聲學風洞是一座單回流式低速風洞,具有開口、閉口兩個試驗段,其中開口試驗段長1.5m,寬0.55m,高0.4m,主要用于聲學試驗。開口試驗段空風洞最大風速為100m/s,背景噪聲范圍75~80dB(A)(氣流風速80m/s,截止頻率100Hz,氣流軸線中心外2m處測得)。開口試驗段外是一個內部尺寸為5.5m寬,3.7m長,4m高的消聲室,消聲室截止頻率為100Hz。

圖1 0.55m×0.4m聲學風洞Fig.1 0.55m×0.4manechoic wind tunnel
1.2 麥克風陣列系統
試驗所采用的麥克風陣列由36個1/4英寸MPA416麥克風傳感器組成。MPA416型傳感器的頻率范圍為20Hz~20kHz,動態范圍為29~127dB。麥克風中傳感器的布置方式為多臂螺旋形,總共有6條螺旋臂,每條螺旋臂上包含6個麥克風傳感器,如圖2所示,麥克風陣列的直徑約為1.0m。
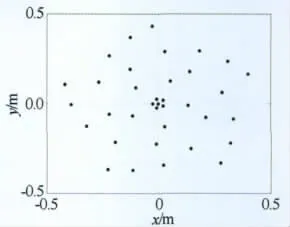
圖2 麥克風陣列分布圖Fig.2 Microphone array layout
麥克風陣列數采系統為48通道BBM公司的MKII便攜式數采系統,其最高采樣頻率可達204.8kHz(圖3)。

圖3 麥克風陣列數采系統Fig.3 Data acquisition system of microphone array
2 麥克風陣列數據處理方法
2.1 波束成形(beamforming)算法
麥克風陣列數據處理時首先生成麥克風陣列互譜矩陣(CSM)。具體計算時首先將麥克風采陣列的信號數據分塊,采用快速傅里葉變換(FFT)將時域數據轉換為頻域數據。那么麥克風陣列的互譜矩陣可表示為
式中矩陣元素為:

其中K為陣列信號數據塊數,M表示陣列中麥克風數目,Pmk(f)表示第m個麥克風第k段數據塊的頻域信號,Ws為頻譜分析選取的數據窗函數因子,窗函數選為hamming窗,上標*號表示共軛。互譜矩陣下三角元素通過上三角對應矩陣元素復共軛得到。
麥克風陣列的數據處理算法采集基于“延遲求和”的波束成形算法[1-2]。假設在聲學試驗模型附近存在一掃描平面,對于掃描平面上任一掃描點,陣列的指向向量為:

式中x表示掃描點與麥克風之間的距離向量,k表示聲波波數向量,rm表示聲波掃描點與麥克風之間的傳播距離,rc表示陣列中心點與掃描點之間距離,Am表示由風洞射流剪切層引起的第m個麥克風的振幅修正因子,ωΔtm,shear為由風洞射流剪切層引起的第m個麥克風的相位修正值。那么聲學風洞試驗時麥克風陣列的輸出功率譜為:

式中上標T表示轉置,p(^e)表示單位帶寬聲壓的壓力均方值,除以(M2-M)表示將陣列輸出功率譜轉化到單一麥克風的量級。扣除互譜矩陣^C對角線元素主要是抑制麥克風自噪聲的影響。式(3)針對窄帶信號求解的,對于寬頻信號,比如1/3倍頻程、倍頻程等,可采取對窄帶信號求和的方式求解。
2.2 風洞射流剪切層修正
在聲學風洞進行氣動聲學試驗時,麥克風陣列位于試驗段射流外部,聲波穿過風洞射流剪切層時,剪切層對聲波產生折射效應,剪切層的折射效應會改變聲波傳播方向和聲音量級。因此需要進行剪切層修正,提高麥克風陣列測試的精準度。
風洞射流剪切層影響根據Amiet[3-4]介紹的聲波穿過剪切層的折射理論進行修正。即根據麥克風位置、剪切層位置以及麥克風陣列掃描點位置之間的幾何關系,對流波動運動關系以及斯涅爾(Snell)折射定律,采用迭代算法求解麥克風陣列掃描點與麥克風之間聲波的真實傳播路徑。具體算法可參考文獻[3-4]。數據處理過程中剪切層位置取為風洞噴口位置。確定聲波的真實傳播路徑后,剪切層的延遲時間為:

式中Rpath為聲波的真實傳播路徑,Rm為麥克風傳感器與掃描點之間的距離。由于聲源振幅在麥克風陣列測試結果中處于相對次要地位,并且由剪切層引起的聲波振幅變化對麥克風陣列識別聲源的結果影響相對較小,具體應用時將不做剪切層振幅修正。
3 麥克風陣列性能的數值模擬
陣列響應圖譜中主瓣和旁瓣是陣列性能設計研究的熱點問題。陣列響應圖譜中主瓣的寬度(稱之為瓣寬,定義為在陣列響應圖譜中與陣列最大響應點相差為3dB處對應的主瓣寬度)決定陣列的分辨率,它是陣列定位聲源的能力和分辨臨近空間聲源的重要度量參數。陣列響應圖譜中旁瓣相對于主瓣的差值確定了陣列的動態范圍。因此陣列響應函數是評估陣列性能指標的重要參數。麥克風陣列響應表達式如下:

式中x0為聲源位置,r0和r0m分別為聲源至麥克風陣列中心和第m路麥克風的距離,r和rm分別為掃描點至麥克風陣列中心和第m路麥克風的距離。wm是第m路麥克風的相應加權因子。相對于聲源點x0,麥克風陣列對任一點的響應為:

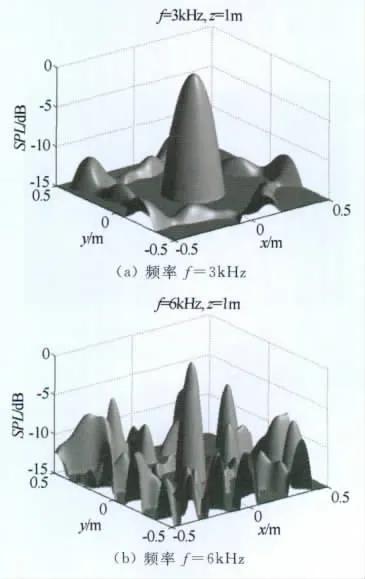
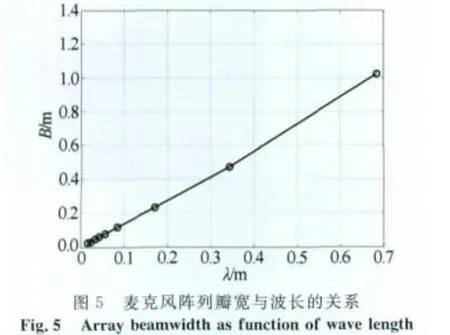
圖4給出了采用公式(6)計算的頻率為3、6、8kHz時36通道螺旋型麥克風陣列響應圖譜。由圖可知,隨著頻率的增大,陣列瓣寬迅速減小,陣列的動態范圍減小。當頻率范圍為1~8kHz,動態范圍大于7dB。圖5給出了陣列瓣寬與波長(頻率)的關系曲線,通過曲線擬合可得36通道螺旋型麥克風陣列的瓣寬為波長的1.48倍。

首先采用數值仿真的手段檢驗麥克風陣列識別聲源的能力。數值仿真時聲源模型為兩個單位強度點聲源,位置分別為(-0.2,0,1.05)m,(0.2,0,1.05)m,頻率分別為4、6kHz,并增加強度為聲源模型強度50%的隨機噪聲信號。圖6給出了仿真數據的麥克風陣列數據處理結果,由圖可知,麥克風陣列識別出的聲源位置與聲源模型位置基本是一致的,并且隨著聲源頻率的升高,陣列空間分辨率也越來越高。同時當頻率增大時,聲源分布圖中虛假聲源也逐漸增多。

4 麥克風陣列實際應用
4.1 麥克風陣列校準
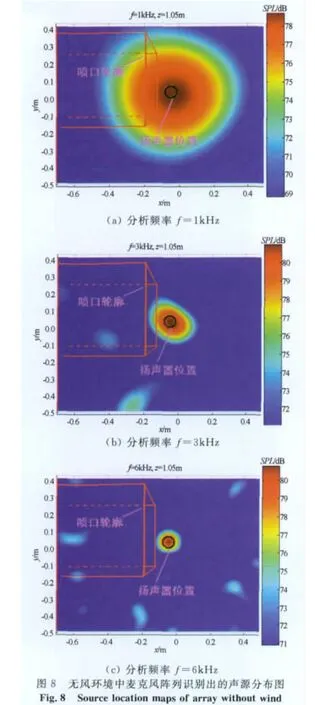
麥克風陣列實際應用時先檢驗無風環境下麥克風陣列識別聲源的能力。無風環境中聲源識別試驗采用的聲源模型為揚聲器,安裝情況如圖7所示。試驗時揚聲器輻射的聲音頻率分別為1、3、6kHz。麥克風陣列數據采集頻率為16384Hz,采集時間5s。麥克風陣列與揚聲器之間的距離為1.05m。數據處理過程中對麥克風陣列采集的數據進行分塊,每個數據塊包含8192個采樣數據。

圖7 揚聲器在風洞中的安裝情況圖Fig.7 Speaker mounted in wind tunnel
圖8給出了36通道螺旋形麥克風陣列識別出的聲源分布圖。由圖可知,麥克風陣列識別出的聲源位置與揚聲器的位置基本一致。當聲源頻率為1kHz時,陣列瓣寬B=1.48×波長=0.5m,麥克風陣列分辨率較低,因此麥克風陣列識別出的聲源位置區域較大,分辨率較低,隨著頻率的增大,麥克風陣列的分辨率增大,但圖中出現虛假聲源,麥克風陣列的動態范圍減小。這與麥克風陣列數值仿真結果是一致的。
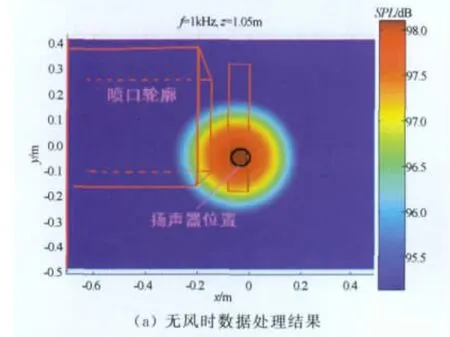
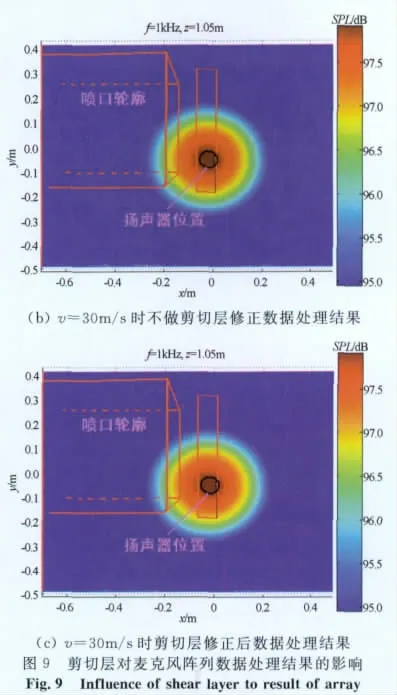
為了進一步考核麥克風陣列識別流場中聲源的能力,試驗驗證了來流條件下麥克風陣列識別聲源的能力。聲源模型仍然采用揚聲器,通過翼型支撐裝置固定在風洞射流內部,聲源發聲頻率為1kHz,與麥克風陣列之間的距離為1.05m,數采頻率為51200Hz,試驗風速為30m/s。圖9給出來流條件下風洞射流剪切層對麥克風陣列識別聲源效果的影響對比圖,由圖可知,風洞射流剪切層影響麥克風陣列識別聲源的量級,同時對麥克風陣列識別聲源的位置有一定影響,采用剪切層修正后,陣列識別聲源的位置略有改善,但由于風速較低,風洞射流剪切層對麥克風陣列識別聲源的位置影響有限,剪切層對陣列識別出聲源的修正量在毫米量級,小于陣列分辨率,麥克風陣列聲源分布圖中聲源位置變化不是特別明顯。
4.2 翼型聲學試驗結果分析
試驗翼型為NACA23018翼型,弦長為100mm,試驗迎角為0°、8°,試驗風速為40m/s。翼型垂直安裝,如圖10所示,翼型與麥克風陣列平面平行。翼型與陣列平面之間的距離為1.05m。數據采集頻率為16384Hz,采集時間為15s。數據處理過程中對麥克風陣列采集的數據進行分塊,每個數據塊包含8192個采樣數據,因此頻率分辨率為4Hz。數據處理過程中采用1/3倍頻程進行分析。
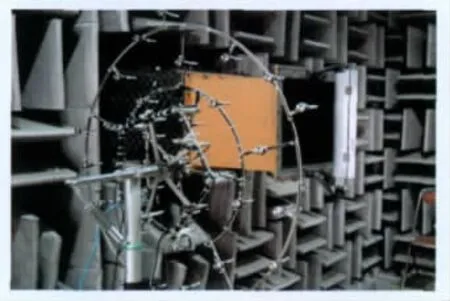
圖10 翼型在風洞中的安裝情況Fig.10 Wing model mounted in wind tunnel
圖11和12分別給出了風速為40m/s,迎角為0°時翼型噪聲頻譜曲線和聲源分布圖。由圖11可知,頻譜曲線上頻率為3.3、3.9、5.3kHz處出現峰值。根據背景噪聲頻譜曲線可知,這些頻率的噪聲不是風洞背景噪聲。圖12分別給出這些頻率對應的噪聲分布圖。圖中可以明顯看到這些頻率的噪聲出現在翼型后緣,它們是由翼型后緣分離、渦的脫落產生的,屬于后緣噪聲(TE noise)。

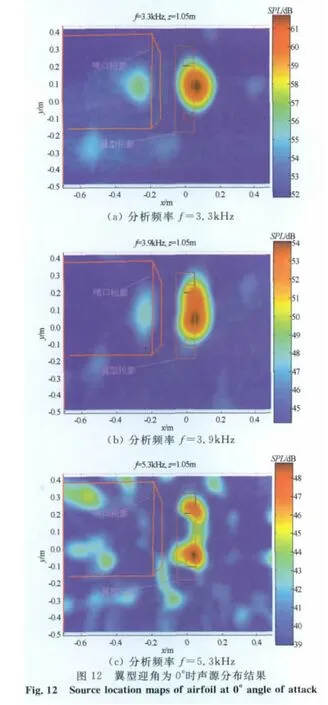
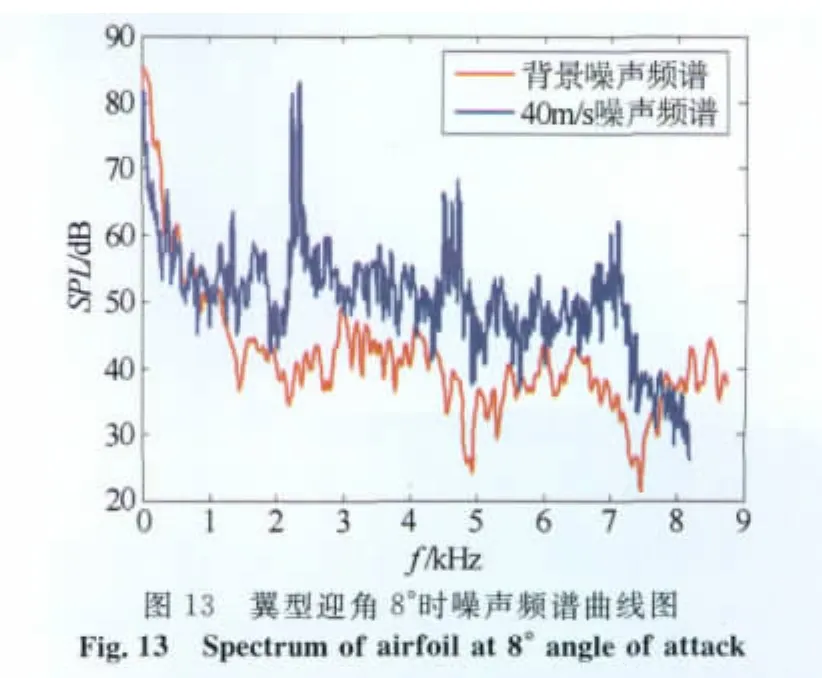

圖13和14分別給出了風速為40m/s,迎角為8°時翼型噪聲頻譜曲線和聲源分布圖,由圖13可知,頻譜曲線上在頻率為1.4、2.4、3.5kHz處出現峰值。圖14給出了這些頻率對應的噪聲分布圖。由圖可知,頻率為1.4kHz的噪聲出現在翼型的表面,可能是由翼面上邊界層轉捩、邊界層分離引起的;而頻率為2.4和3.6kHz的聲源則為翼型后緣噪聲。
5 結 論
麥克風陣列測試技術是現代氣動聲學風洞試驗研究的關鍵試驗技術,通過在0.55m×0.4m聲學風洞開展的試驗,研究了麥克風陣列數據處理方法和風洞射流剪切層的修正方法,研究結果表明:
(1)風洞剪切層影響麥克風陣列識別聲源的精準度,采用剪切層修正方法可以一定程度修正風洞射流剪切層對麥克風陣列測試精準度的影響,但還需研究更加有效的剪切層修正方法;
(2)基于麥克風陣列的數據處理方法可以準確識別出聲源位置,可用于聲學風洞試驗;
(3)翼型聲學試驗結果表明翼型后緣產生明顯的后緣噪聲源,它們是由翼型渦的脫落以及邊界層分離引起的。
[1] WILLIAM M Humphreys.Design and use of microphone direction arrays for aeroacoustic measurement[R].AIAA 98-0471.
[2] THOMAS J Mueller.Aeroacoustic measurements[M].Springer,2002.
[3] SCHLINKER R H,AMIET R K.Shear layer refraction and scattering of sound[R].AIAA 1980-973.
[4] AMIET R K.Refraction of sound by a shear layer[R].AIAA77-0054.
[5] SODERMAN P T,NOBLE S C.A four-element endfire microphone array for acoustic measure-ments in wind tunnels[R].NASA-TM-X-62-331,1974.
[6] CLIFTON Horne,JULIE A Hayes.Effects of distribution source coherence on the response of phased acoustic arrays[R].AIAA 2000-1935.
[7] GROSCHE R H,SCHNERDER G.Wind tunnel experiments on airframe noise sources of transport aircraft[R].AIAA 1997-1642.
[8] 季建朝,白龍,黃迅.基于狀態觀測器的波束形成算法及其航空應用[J].航空學報,2011,48(1):35-40.
猜你喜歡
中學生數理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
電子測試(2018年4期)2018-05-09 07:28:12
當代化工研究(2016年9期)2016-03-20 16:22:13
中國慣性技術學報(2015年1期)2015-12-19 13:12:17
計算機工程(2015年4期)2015-07-05 08:28:04
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
聯合國青年技術培訓(2014年7期)2014-04-12 00:00:00
中國質量與標準導報(2014年7期)2014-02-28 22:24:35
