基于BTT控制的無人水下航行器動力學模型
2012-05-28 01:23:04張翼超周徐昌沈建森石漢成
水下無人系統(tǒng)學報 2012年1期
張翼超, 周徐昌, 沈建森, 石漢成
?
基于BTT控制的無人水下航行器動力學模型
張翼超1, 周徐昌1, 沈建森1, 石漢成2
(1. 海軍工程大學 兵器工程系, 湖北 武漢, 430033; 2. 海軍蚌埠士官學校 兵器系, 安徽 蚌埠, 233012)
針對傳統(tǒng)采用側(cè)滑轉(zhuǎn)彎(STT)控制技術的無人水下航行器(UUV)快速機動時由于側(cè)滑產(chǎn)生較大誘導力矩及其自動駕駛儀三通道間產(chǎn)生較強的耦合而降低其控制系統(tǒng)穩(wěn)定性的問題, 提出了采用傾斜轉(zhuǎn)彎(BTT)控制技術的改進方法。根據(jù)UUV的航行動力學模型與傾斜轉(zhuǎn)彎控制的特點, 對UUV空間動力學方程進行了必要的簡化, 得到了基于BTT控制技術的UUV動力學模型, 并從自動駕駛儀設計的簡便性出發(fā), 提出了利用其法向過載作為狀態(tài)變量的全狀態(tài)可測量數(shù)學模型, 為進一步設計基于BTT控制技術的UUV控制系統(tǒng)提供參考。
無人水下航行器; 傾斜轉(zhuǎn)彎; 動力學模型
0 引言
無人水下航行器(unmanned underwater vehi- cles, UUV)在海洋調(diào)查, 環(huán)境監(jiān)測, 水下工程等民用及軍用領域都有廣泛的應用, 在UUV發(fā)展過程中, 其機動性是關鍵技術之一[1-2]。對傳統(tǒng)的采用側(cè)滑轉(zhuǎn)彎(skid-to-turn, STT)技術[3]的UUV而言, 快速機動是通過較大的俯仰角及側(cè)滑角提供相應的俯仰力矩與偏航力矩來實現(xiàn)的, 而側(cè)滑 將引起UUV誘導力矩過大而降低穩(wěn)定性, 同時快速機動致使自動駕駛儀各通道間產(chǎn)生強耦合而失去其合理性。傾斜轉(zhuǎn)彎(bank-to-turn, BTT)是飛機與導彈常采用的控制技術[4-5], 但對UUV來說, BTT控制技術尚未引起人們的廣泛關注。
采用BTT控制技術的UUV運動過程中, 滾動控制系統(tǒng)快速把最大升力面轉(zhuǎn)到理想的機動方向, 同時俯仰控制系統(tǒng)控制UUV在最大升力面內(nèi)產(chǎn)生需要的機動加速度[6]。
由流體動力學原理可知, 當UUV在最大升力面產(chǎn)生機動時, 不存在側(cè)向機動或側(cè)向機動很小, 即側(cè)滑角為零度或近似零度, 其具有最佳穩(wěn)定性。此時由于側(cè)滑角產(chǎn)生的誘導力矩為零, 因此對UUV的最大攻角可以進一步放寬。此外, 對UUV進行滾動定位還可有效改善流體動力性能。BTT這一控制技術能大大提高UUV的機動能力, 達到良好的戰(zhàn)術技術指標。
BTTUUV的外形和控制特點決定了其為一個具有運動學耦合、慣性耦合、流體動力耦合的控制作用耦合的多變量被控對象, 因此傳統(tǒng)的三通道獨立控制系統(tǒng)設計方案已不適用, 需用多變量控制方法設計其自動駕駛儀。因此, 對BTT UUV控制系統(tǒng)設計問題的研究成為BTT UUV研究中的關鍵問題之一, 但要解決其控制系統(tǒng)的設計問題, 必須首先建立BTTUUV的數(shù)學模型。
1 UUV的空間運動模型
UUV空間運動方程是研究UUV運動, 精確預報UUV空間運動軌跡的基礎。但是, UUV空間運動方程的一般表達式十分復雜, 須對其進行必要的簡化。
根據(jù)UUV的特點, 假定:
1) 流體動力滿足線性假設;
2) UUV外形關于縱平面和橫平面對稱;
3) 不計UUV的慣性積項, 即J=J=J=J=J=J=J=0;
4) 不計UUV航行過程中可能存在的質(zhì)量及質(zhì)量分布變化;
5) 重心位置y=z=0;
8)ω,ω為小量, 忽略2階小量;
10) 重力矩和負浮力可以在導引律中得到補償, 暫不考慮其影響。
根據(jù)文獻[7], 得到UUV空間運動方程組, 如式(1)~(5)所示,可得空間運動方程的簡化式



2 基于BTT控制的UUV數(shù)學模型
據(jù)文獻[5], UUV的旋轉(zhuǎn)角速度與姿態(tài)角關系
(7)

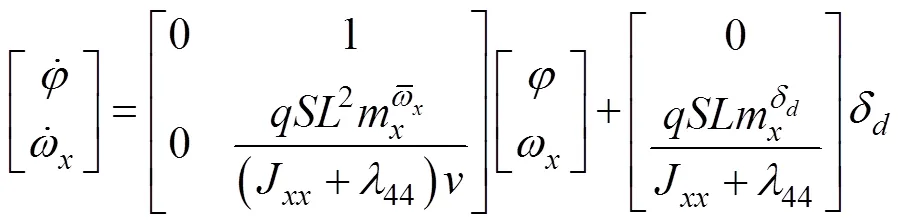
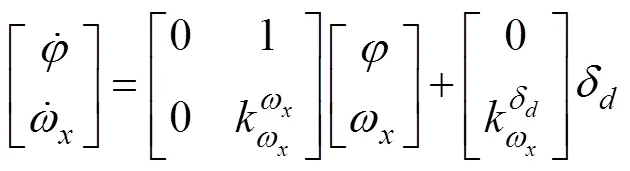
滾動通道的狀態(tài)方程
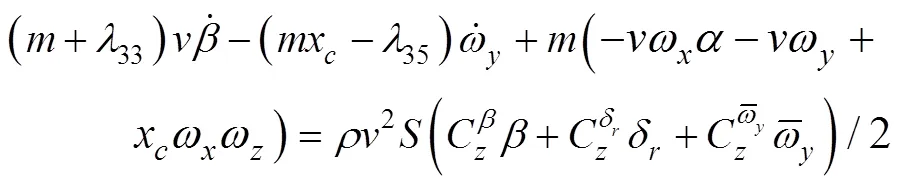
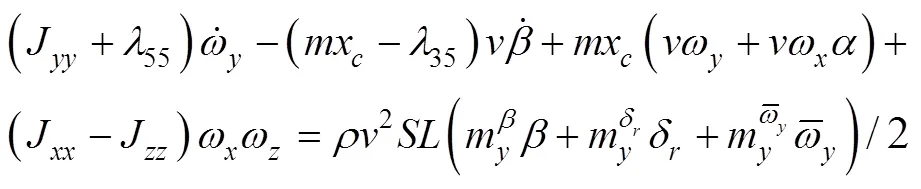
俯仰通道的方程
偏航通道的方程
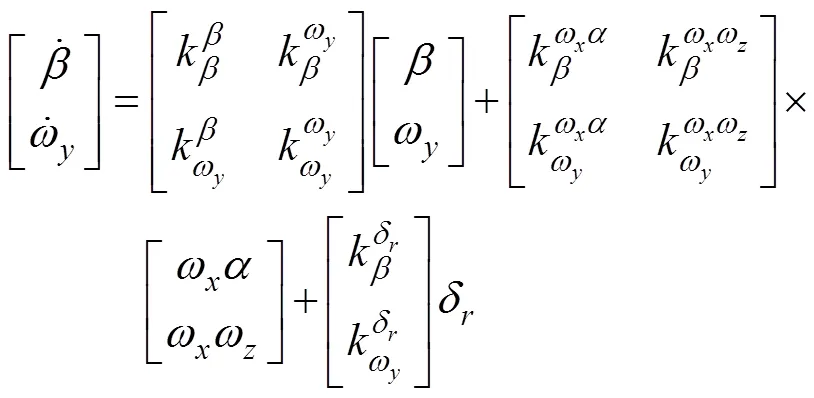
據(jù)式(9)~式(10), 俯仰與偏航通道狀態(tài)方程
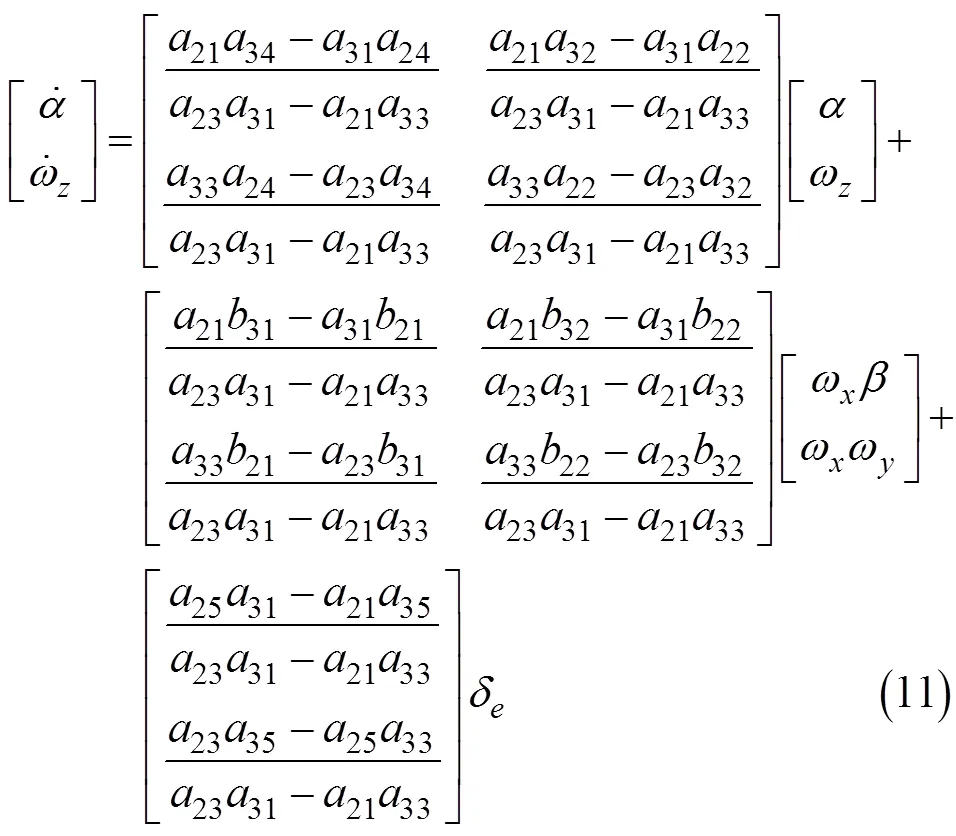
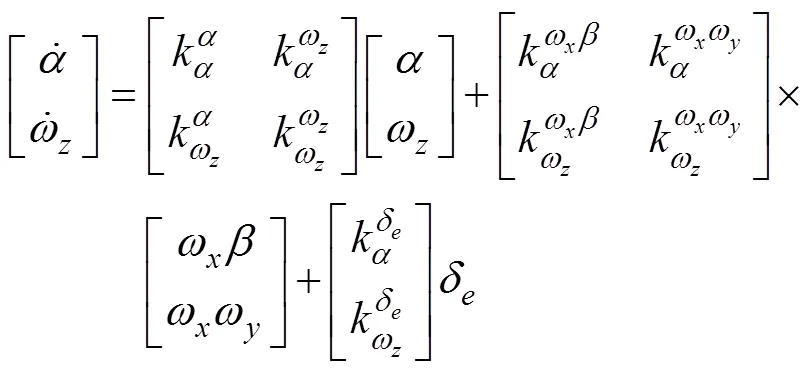
為簡化表示, 將式(8)與式(11)~式(12)表示為
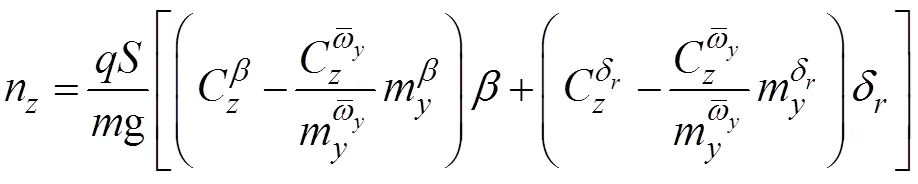
根據(jù)式(1)~式(5), UUV運動過程中, 作用在UUV上的力為


由于UUV法向過載可表示為
(20)
3 全狀態(tài)可測量BTT UUV數(shù)學模型

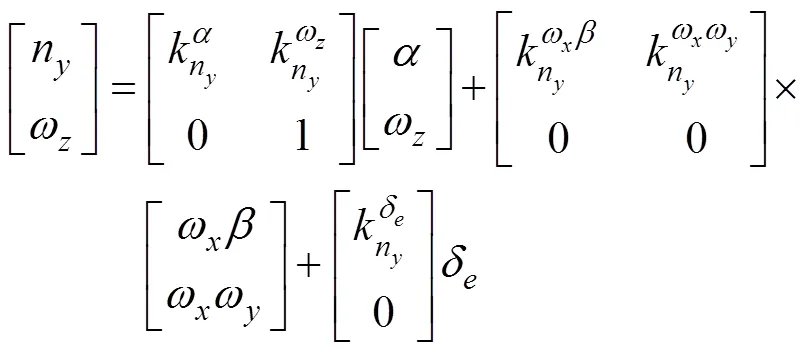
不計流體慣性力[8], UUV法向過載可近似為

令

可得
(28)
舵機是自動駕駛儀的執(zhí)行元件, 根據(jù)系統(tǒng)對舵回路的基本要求, 參考相關文獻及試驗數(shù)據(jù), 本文選取的舵機, 忽略其非線性, 用等效的1階慣性環(huán)節(jié)代替實際舵機, 其動態(tài)過程為
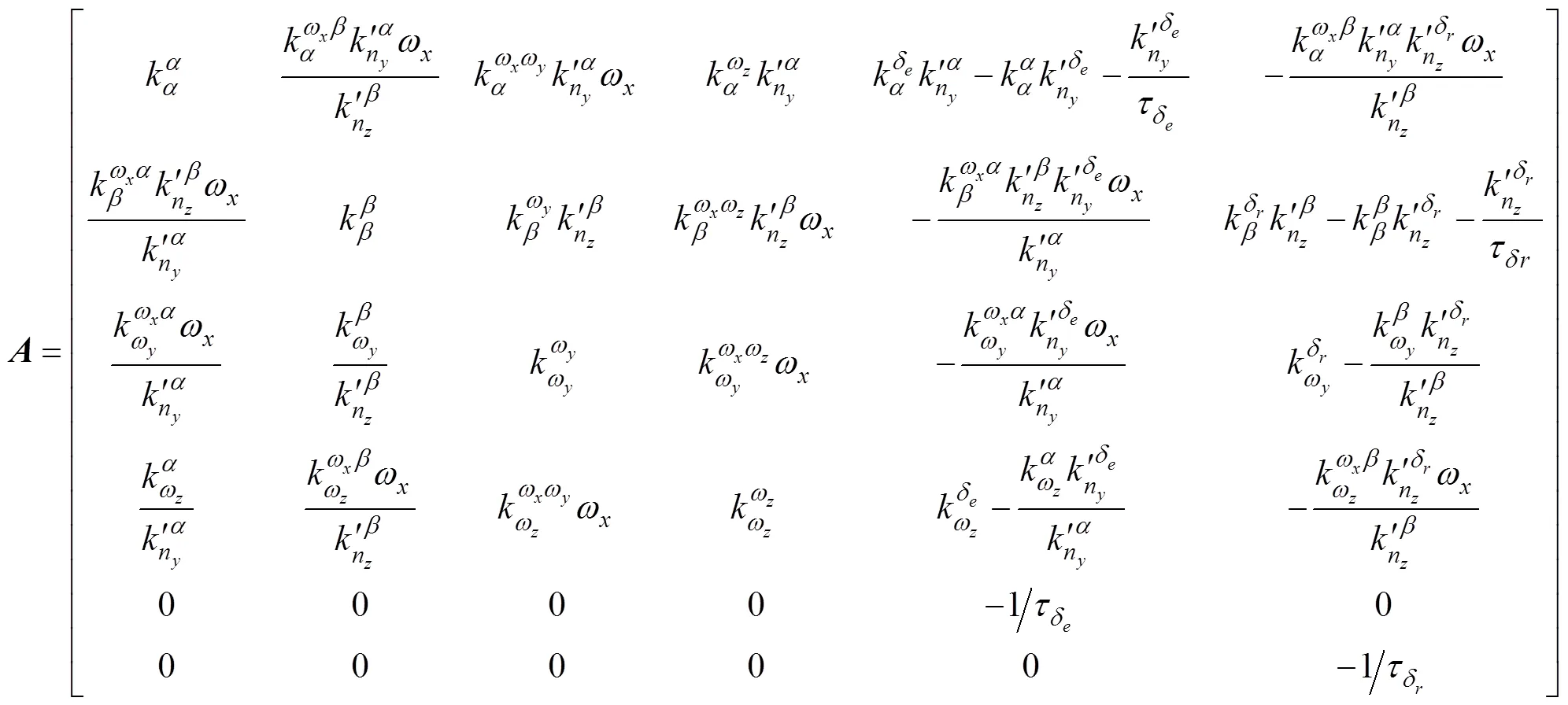
根據(jù)魚雷俯仰-偏航通道數(shù)學模型式(30)~ (33), 取狀態(tài)向量
輸入信號
輸出信號
則俯仰-偏航通道狀態(tài)空間模型為
4 結(jié)束語
本文通過對所研究的BTT UUV實際對象的假設和簡化, 建立了BTT UUV的動力學模型。并考慮到狀態(tài)變量的可測量性和自動駕駛儀設計的簡便性, 建立了全狀態(tài)可測量的BTT UUV控制數(shù)學模型, 為進一步開展BTT UUV控制系統(tǒng)設計奠定了基礎。
[1] Zhao S. Advanced Control of Autonomous Underwater Ve- hicles[D]. Honolulu: University of Hawaii, 2004: 8-10.
[2] Yuh J. Design and Control of Autonomous Underwater Robots: A Survey[J]. Autonomous Robots, 2000, 8(1): 7-24.
[3] 高旋, 周徐昌, 潘遜. 基于BTT的反魚雷魚雷控制技術[J]. 兵工自動化, 2010, 29(10): 79-81. Gao Xuan, Zhou Xu-chang, Pan Xun. Control Technologies of Anti-Torpedo-Torpedo Based on BTT[J]. Ordnance Indu- stry Automation, 2010, 29(10): 79-81.
[4] Uang H J, Chen B S. Robust Adaptive Optimal Tracking Design for Uncertain Missile Systems: A Fuzzy Approach[J]. Fuzzy Sets and Systems, 2002, 126(1): 63-87.
[5] 林德福, 孫寶彩, 王江.∞理論在BTT導彈自動駕駛儀設計中的應用[J]. 系統(tǒng)仿真學報, 2010, 22(4): 991-995. Lin De-fu, Sun Bao-cai, Wang Jiang. BTT Autopilot Design Using∞Control Theory[J]. Journal of System Simulation, 2010, 22(4): 991-995…
[6] Gao Xuan, Zhou Xu-chang, Chen Guang. Roll Maneuver- ablity of ATT Based on BTT[C]//2011 International Confer- ence on System Design and Data Processing, 2011: 542-545.
[7] 李天森. 魚雷操縱性[M]. 第2版. 北京: 國防工業(yè)出版社, 2007.
[8] 嚴衛(wèi)生. 魚雷航行動力學[M]. 西安: 西北工業(yè)大學出版社, 2005.
Dynamic Model of Unmanned Underwater Vehicle Based on BTT Control
ZHANG Yi-chao1, ZHOU Xu-chang1, SHEN Jian-sen1, SHI Han-cheng2
(1.Department of Weapon Engineering, Naval University of Engineering, Wuhan 430033, China; 2. Department of Weaponry, Bengbu Navy Petty Officer Academy, Bengbu 233012, China)
The stability of traditional unmanned underwater vehicle (UUV) is deteriorated because of the induced rolling moment generated by skid and the cross-coupling among three autopilot channels in high-speed maneuver, so a bank-to-turn (BTT) control method is proposed to improve UUV maneuverability. Appropriate simplification of the spacial dynamic model of UUV is made according to the characters of the UUV navigation dynamic model and BTT control, hence a BTT control-based UUV dynamic model is obtained. Moreover, the normal overload are taken as state variables, which can be measured easily, in order to simplify the design of the autopilot. The proposed model may be suitable for the design of the UUV control system based on BTT control technology.
unmanned underwater vehicle (UUV); bank-to-turn (BTT); dynamic model
TJ630.33
A
1673-1948(2012)01-0042-05
2011-06-12;
2011-06-28.
張翼超(1985-), 男, 在讀博士, 研究方向為水下探測與控制.
(責任編輯: 楊力軍)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
建材發(fā)展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
上海大中型電機(2017年4期)2017-02-06 05:27:06
光學精密工程(2016年6期)2016-11-07 09:07:19
照明工程學報(2016年3期)2016-06-01 12:17:56
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2014年1期)2014-04-04 12:00:32
