高速數傳信號角跟蹤及誤差分析
2012-06-01 02:55:24張晏旭吳鐵柱
電子科技 2012年11期
張晏旭,吳鐵柱
(1.中國電子科技集團公司第27研究所測控工程部,河南鄭州 450047;2.西安衛星測控中心測控技術部,陜西西安 710043)
近幾年來,隨著遙感技術的發展,圖像分辨率不斷提高,低軌遙感衛星數據率也在不斷刷新紀錄,從幾百Mbit·s-1上升到幾 Gbit·s-1,工作頻段也從 X 頻段擴展到Ka頻段甚至更高,如何提高高速數傳信號角跟蹤靈敏度和跟蹤精度,減小角跟蹤誤差,是建立穩定可靠星地數據傳輸鏈路的關鍵技術。
高速數據信號角跟蹤技術,是通過幅度檢波、正交解調提取角誤差信息,適應各種信號類型,尤其適應不同調制方式的遙感衛星信號的寬帶角跟蹤技術[1],與傳統的單脈沖窄帶跟蹤方式不同,影響跟蹤性能的因素和分析方法也有所不同。結合已經研制成功的高數數傳角跟蹤系統,介紹了數傳信號跟蹤原理和工程實現方案,并對跟蹤誤差進行了分析。
1 單通道寬帶跟蹤技術
1.1 單通道寬帶跟蹤系統
對于單脈沖跟蹤體制,比較器輸出的兩路誤差信號ΔEL和ΔAZ首先進行單通道技術處理,將ΔEL和ΔAZ信號進行π/2移相后與另一路差信號合并為一路誤差信號,再對合并的差信號進行QPSK調制后對耦合的和信號進行調幅,形成時分復用調幅波,在輸出端再分別進行恢復。這種單通道單脈沖跟蹤技術的優點是設備簡單、結構緊湊、便于實現兩路誤差信號間的幅相特性一致,有利于信號的自動增益控制和其他技術處理[2]。單通道單脈沖信號跟蹤系統原理如圖1所示。

圖1 單通道單脈沖寬譜跟蹤系統原理框圖
1.2 寬帶跟蹤理論推導
采用圖2所示的角誤差坐標系表示。A0為天線電軸指向,垂直于目標平面xoy,θ為誤差角,ε為天線電軸指向誤差,Φ為指向誤差OP與水平軸的夾角,即角誤差方向角。

圖2 角誤差形成坐標系
根據角誤差坐標系則有:方位誤差電壓 εAZ=μθcosφ;俯仰誤差分量 εEL=μθsinφ 設目標來波為理想圓極化,接收到和信號為

其中,A∑為信號幅度;ω為接收的射頻信號頻率;n∑(t)為和信號噪聲。接收到的差信號為

其中,AΔ為信號幅度;nΔ(t)為差信號噪聲。微波和信號通道與差信號通道的相位差,通過移相處理,可調整為0。
差信號經過調相器四相移相后為差信號為

n=0,1,2;T為調制方波信號的周期;M為差信號耦合系數。
Σ、Δ信號相加合成后

經過放大、下變頻和濾波放大后,信號中心頻率變為ω0;噪聲變為窄帶高斯噪聲,信號變為

式中,nc(t)和ns(t)為帶限高斯噪聲的同相和正交分量;σ為噪聲信號隨機相位。
包絡檢波后

在A∑?AΔ,且M,θ均很小的情況下,有

那么,根據(1+x)n=1+nx,x?1,有

隔直濾波后,取出包絡信號

對此信號再與K(t)進行分時累加處理解調,即可得到方位和俯仰角誤差信息

則方位電壓

俯仰電壓

上述結果中的幅度表征了天線偏離目標角度的大小,兩項相減的符號表明了天線偏離目標的方向,方位和俯仰誤差電壓送伺服系統,根據角誤差電壓的大小和方向,驅動天線完成對目標的自動跟蹤。
2 系統方案
跟蹤系統組成框圖如圖3所示。系統主要由和路低噪聲場放、差路低噪聲場放、8 bit數字移相器、下變頻器、數字中頻跟蹤接收機、伺服控制和伺服驅動單元等組成。
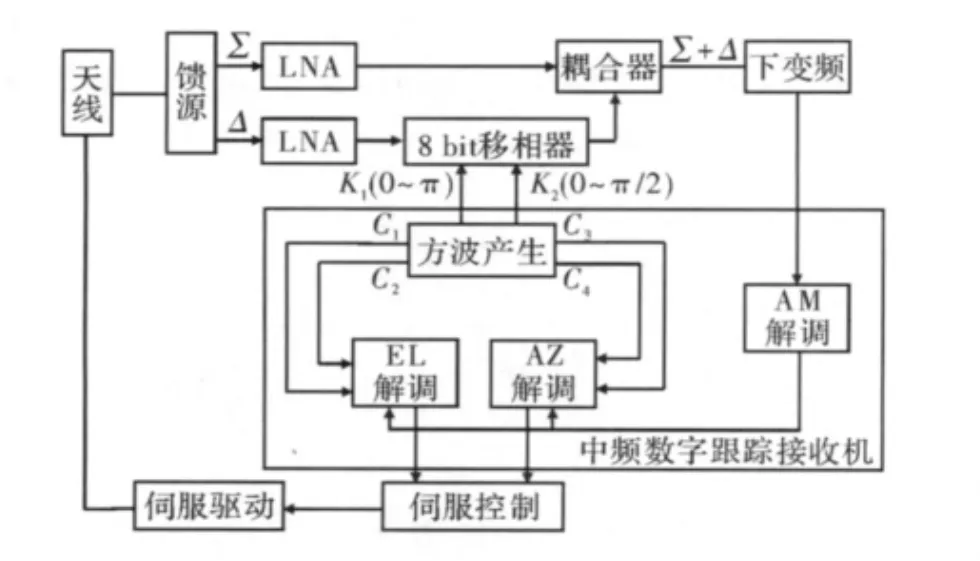
圖3 跟蹤系統組成框圖
(1)差信號調制。K1和K2為移相調制方波,K1的頻率是K2頻率的2倍,方波K2每個高電平對移相器移相90°,方波K1每個高電平對移相器移相180°。該調制方波作用于數字移相器高兩位對射頻差信號進行調制,形成 0°、90°、180°、270°相位調制差信號后,與和信號合成單通道調幅跟蹤信號。差信號調制信號時序如圖4所示。

圖4 差信號相位調制時序圖
(2)數字中頻跟蹤接收機。采用全數字化方案實現,ADC采樣中頻頻率為70 MHz。其中ADC完成模擬信號到數字信號的轉換,數字下變頻模塊(DDC)通過數字中頻信號與NCO產生的正弦和余弦信號相乘混頻得到基帶頻率的I、Q兩路正交信號,并分別對兩路信號完成抽取和濾波,數字調幅解調模塊則完成了AM信號的解調和數字AGC電壓的積分、環路控制;數字誤差解調模塊最終實現方位、俯仰信號的分離,方位與俯仰誤差電壓解調恢復。調幅解調原理如圖5所示,角誤差解調如圖6所示。

圖5 調幅波解調原理

圖6 角誤差解調原理
3 跟蹤誤差分析
影響跟蹤性能,造成跟蹤誤差增大的主要因素包括:和差信號相位不一致誤差、調制解調不同步誤差和熱噪聲誤差等。
3.1 和差相位不一致誤差
如果在差信號合成前,和差信號存在相位差,不僅在方位、俯仰誤差電壓中存在交叉耦合分量,還會造成誤差靈敏度的降低。解決問題的方法是在高頻和支路或差支路加一可調移相器調整兩信號的相對相位差,調整的依據是系統的誤差靈敏度最大且交叉耦合最小。在工程應用中,系統允許跟蹤誤差靈敏度下降1%[3],如果交叉耦合系數要求>1/7,根據公式可以計算出和差信號剩余相位差不應>8°,實際測量結果表明,和差通道信號相位差可以調整到3°以內。
3.2 調制解調不同步誤差
調制和解調脈沖不同步同樣會造成跟蹤靈敏度下降,同樣允許跟蹤誤差靈敏度下降1%,可計算機出允許不同步誤差為8°。
3.3 熱噪聲誤差
由于采用和、差支路單獨配置低噪聲放大器的方案,低噪聲放大器的增益很高,放大器后饋線和功能部件的噪聲貢獻可忽略。
則進入伺服單元支路的熱噪聲功率為N=KT2β,其中,2β為伺服雙邊帶噪聲帶寬,K為系統等效噪聲溫度。則熱噪聲功率引起天線電軸的偏角為

綜合考慮差路調制信號對和路數據信號的影響,在保證系統品質因素的前提下,系統耦合系數M取值約為6 dB,X波段12 m天線系統等效噪聲溫度約為22 dBK,差通道增益約為120 dB,伺服帶寬1 Hz,歸一化差斜率取1,計算出由于熱噪聲造成跟蹤誤差<0.002°。
4 結束語
采用本方案設計的寬帶跟蹤系統已成功應用于多個工程項目,跟蹤性能平穩,跟蹤精度滿足系統指標要求。將記錄的方位和俯仰跟蹤角數據先與基準角度比較,然后利用變量差分平滑處理,得到方位和俯仰的跟蹤標準誤差。結果表明:衛星的高速數據信號采用寬帶跟蹤方式的跟蹤精度與同等信噪比下信標角跟蹤方式的跟蹤精度相當。
[1]楊長全.雷達接收機設備[M].北京:電子工業出版社,1997.
[2]張晏旭.遙感衛星地面接收系統總體技術方案建議書[M].鄭州:中國電子科技集團公司第二十七研究所,2008.
[3]李志杰.多模單通道跟蹤系統[J].現代電子技術,2004,32(18):59-61.
[4]王仁濤,王毅,李斌.高功率微波武器的防空作戰應用[J].電子科技,2011,24(11):128 -131.
[5]胡娟,陳文全.同步軌道共位衛星位置確定技術[J].電子科技,2012,25(7):136 -138,141.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
