汽車ESP液壓控制系統聯合仿真
2012-06-02 09:31:22鄧國紅王林峰石智衛
重慶理工大學學報(自然科學) 2012年1期
張 勇,鄧國紅,王林峰,石智衛
(1.重慶理工大學重慶汽車學院,重慶 400054;2.江森自控帥福得新能源電池研發(上海)有限公司,上海 201106)
汽車電子穩定性程序(electronic stability program,ESP)是汽車的一種新型主動安全系統,它主要包括各種傳感器、控制器和液壓執行機構。通過傳感器不斷采集汽車行駛狀態信號,控制器判斷汽車穩定狀態并做出控制命令,液壓執行機構接受控制命令,對4個車輪分別進行制動,產生橫擺力矩,控制汽車不足轉向或過多轉向的運動趨勢,以提高汽車的操縱穩定性,減少交通事故的發生[1-3]。
液壓系統是ESP控制系統中的高速執行機構,各液壓控制閥必須在短時間內對控制指令做出響應,其動態特性直接決定了ESP控制系統的有效性和可靠性。因此,研究ESP控制系統的工作原理,掌握液壓執行機構的動態特性及影響因素,對系統參數進行合理匹配,保證ESP工作的可靠性,是非常必要的[4]。
1 ESP液壓系統模型的建立
1.1 ESP液壓控制系統的工作原理
如圖1所示,ESP液壓系統共有12個電磁閥和1個電機接受電子控制單元(ECU)的命令。當ESP控制系統進入工作狀態后,隔離閥、吸入閥和泵通電,制動液經吸入閥和回油泵流入高壓阻尼器以減弱油壓脈動,然后經增壓閥流入制動輪缸進行制動。當制動力達到目標值時,減壓閥和吸入閥不通電,切斷制動主缸與制動輪缸的油路及制動輪缸與低壓蓄能器的油路,保持制動力不變。當制動力超過目標值時,減壓閥通電,制動液經減壓閥流入低壓蓄能器以暫時儲存,并成為下一次增壓的油源,制動力也逐漸減小。在新的增壓過程中,制動液在回油泵的作用下經阻尼器、增壓閥再次流入制動輪缸。如此進行增減壓循環,直至液壓系統退出ESP控制模式[5]。
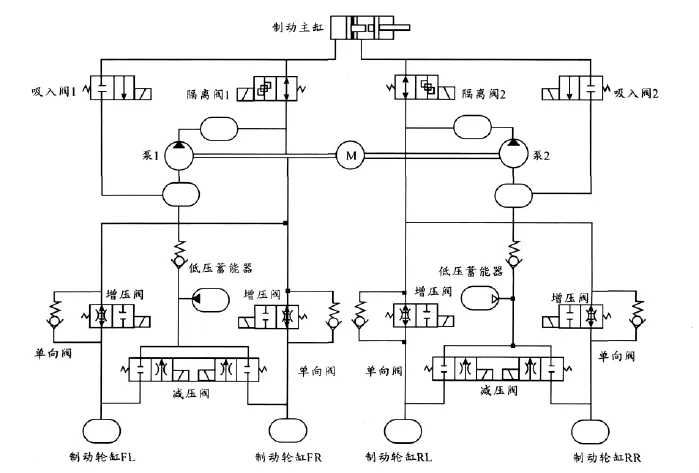
圖1 ESP液壓控制系統的工作原理
1.2 ESP液壓系統模型的建立
根據流體力學相關理論,在AMEsim軟件中建立液壓系統主要元件的數學模型,描述其動態性能[6-7]:
1)節流閥模型
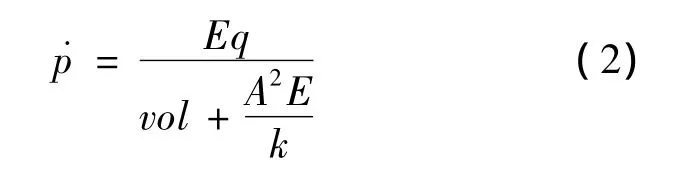
節流閥起流量控制作用,在增壓閥、減壓閥和阻尼器中都會用到,是液壓系統中常用的模型。節流閥模型的輸入量為制動液壓力差Δp(Pa),輸出量為流量q(m3/s),其數學模型為

式中:A為節流孔截面積(m2);Cqmax為最大流量系數,取 0.7;ρ為制動液密度,取 850 kg/m3;λc為制動液臨界雷諾數,取1 000;υ為制動液運動黏度,取42.5 m2/s;d為節流孔徑(m)。
2)電磁閥模型
汽車ESP液壓系統中各種電磁閥的作用不同,其結構和尺寸也不相同,使用較多的是高速開關閥,其流量特性按式(1)計算。電磁閥在驅動電壓作用下,完全開啟和關閉都存在一定的時間延遲,閥芯的位移和速度通過設置固有頻率和阻尼比,采用二階延遲環節進行計算。為使制動液快速進入工作循環,吸入閥采用較大的孔徑,約為2.5 mm;為提高制動壓力的控制精度,增壓閥和減壓閥一同起雙重節流作用,采用較小的孔徑,約為0.6 mm。
3)蓄能器模型
汽車ESP液壓系統采用彈簧活塞式蓄能器,其數學模型需定義活塞直徑、彈簧剛度等,輸入量為制動液流量q(m3/s);輸出量為蓄能器端口壓力p(Pa)。

式中:q為油泵輸出流量(L/min);V為油泵排量,取0.12 cc/r;n為油泵電機轉速,取3 000 r/min。
5)主缸模型
主缸采用雙腔串聯模型,直接調取軟件子模型中的主缸,增加預壓單元。根據主缸實際結構尺寸,設定前后缸活塞直徑為22.2 mm;前后缸活塞桿徑為3.25 mm;前缸運動部件等效質量0.3 kg,后缸運動部件等效質量0.2 kg;后缸彈簧剛度3.8 N/mm;預壓單元的預壓力通過編輯ASCII文件調節以快速建立壓力,提高系統的響應時間。
6)輪缸模型
輪缸采用盤式制動器,直接調取軟件子模型中的輪缸。設定制動輪缸直徑為50 mm,制動器有效半徑為130 mm,制動效能因數為0.8,其數學模型為

式中:mp為輪缸活塞質量;xp為輪缸活塞位移;Cp為制動器黏性阻尼;Kk為等效剛度;Aw為活塞截面積;Fk0為系統干摩擦力。
最終建立好的整個液壓系統模型如圖2所示。式中:E為制動液體積模量,取17 000 bar;A為截面積,取314 mm2;k為彈簧剛度,取20 N/mm;vol為蓄能器的容積。
4)油泵模型
預壓泵和回油泵都采用柱塞泵,其數學模型需定義油泵電機轉速和油泵排量,輸入量為制動液壓力,輸出量為油泵流量,忽略機械損失和制動液泄漏。
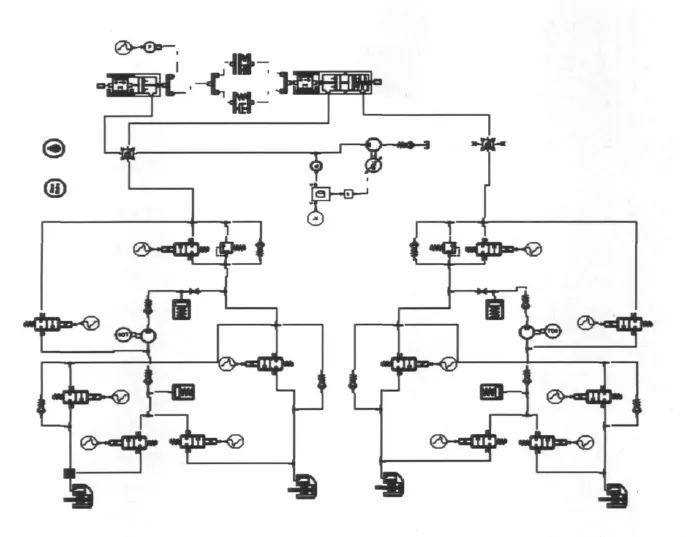
圖2 ESP液壓系統模型
2 ESP液壓系統動態特性仿真分析
在汽車行駛過程中,ESP控制系統需要根據運行狀態情況對車輛進行實時干預。ECU發出控制指令后,液壓系統應能在極短時間內對輪缸制動壓力進行精確的增壓、保壓、減壓調節。因此,液壓系統的穩定性和輪缸制動壓力的響應速度成為衡量液壓系統動態特性的主要指標[8]。
以左前輪為例,通過PWM設置產生周期信號作為增壓閥和減壓閥的控制源,仿真時間2 s,步長0.01 s,對所建立的液壓系統進行仿真。控制信號及仿真結果如圖3~8所示。
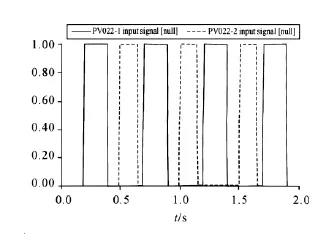
圖3 控制信號
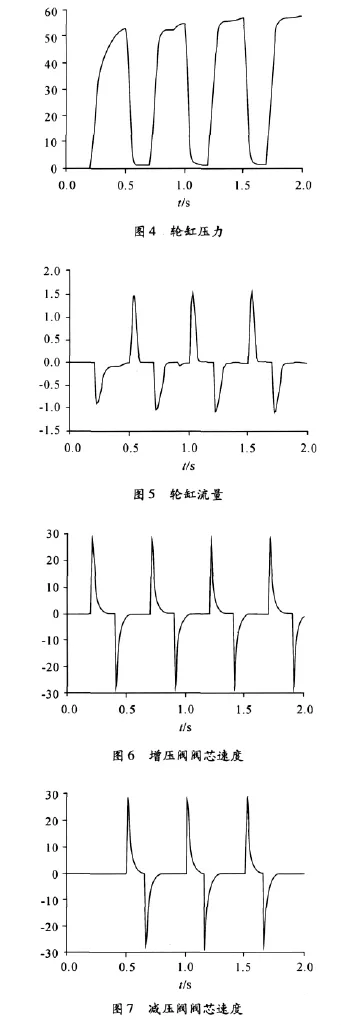
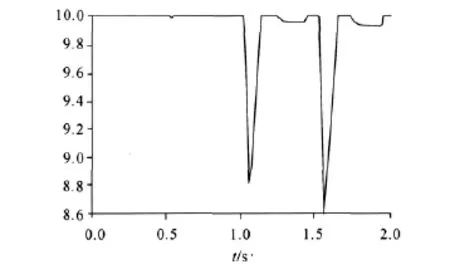
圖8 低壓蓄能器活塞位移
從仿真結果可以看出,在控制信號驅動下,增壓閥、減壓閥可實現周期性開啟和關閉,輪缸制動壓力和流量也呈現周期性變化,以實現制動車輪的增壓-保壓-減壓-保壓的循環工作。
在增壓過程中,增壓閥開啟,減壓閥保持關閉狀態,制動液在回油泵的作用下流入制動輪缸。增壓前期,制動輪缸流量迅速增加,壓力也迅速增加;增壓后期,制動輪缸壓力趨于飽和,流量降低,但回油泵持續供油,壓力緩慢上升。在減壓過程中,增壓閥保持關閉狀態,減壓閥開啟,制動輪缸中的高壓制動液速釋放到低壓回路中,輪缸壓力急劇降低。部分制動液儲存在低壓蓄能器中,既可以減小壓力沖擊和脈動流量,消除系統噪聲,又可以存儲減壓所排出的制動液,作為下次增壓的油源。在整個工作循環中還包括保壓過程,這時增壓閥和減壓閥都保持關閉狀態,制動輪缸壓力變化緩慢。
增壓閥和減壓閥并不隨著控制信號的通斷立即開啟、關閉,而是存在著明顯的遲滯特性,這與實際電磁閥的工作過程是吻合的。
3 動態特性影響因素仿真分析
利用AMEsim批處理功能得到ESP液壓系統各元件不同特征參數值的動態響應曲線,就可以直觀地考察各種特征參數對液壓系統動態特性的影響。
液壓控制閥是液壓系統的關鍵元件,通過改變其固有頻率可以得到不同的響應特性,如圖9~10。
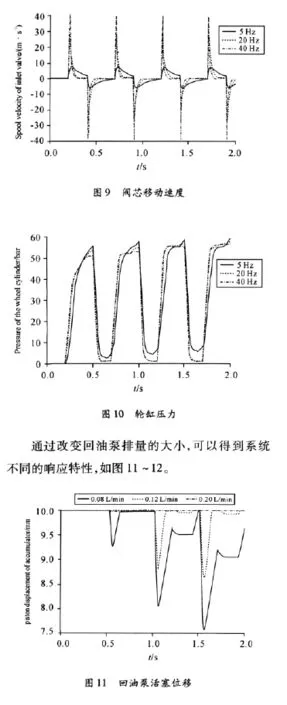
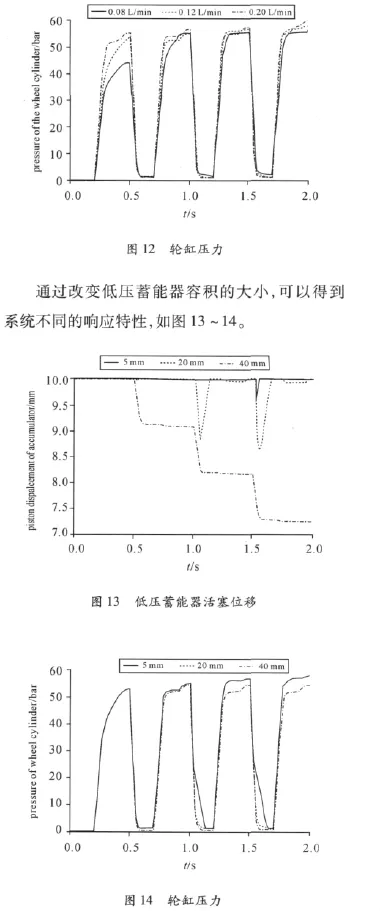
從以上仿真結果可以看出,改變液壓系統中主要元件的參數對系統的穩定性和響應速度都有一定的影響,提高電磁閥的固有頻率可以提高響應速度,但會增加成本。回油泵排量增大可以增大系統的流量和壓力,加速循環,但是過大的排量會導致系統壓力超調,浪費系統資源。過小的排量使輪缸達不到系統壓力響應要求,低壓蓄能器減壓不充分。低壓蓄能器容積過小導致系統減壓不充分,增大容積可以使系統充分減壓,但過大的容積使增壓過程不能達到要求。在進行液壓系統設計時,各主要元件間要合理匹配,才能提高系統的性能[9]。
4 整車聯合仿真
4.1 聯合仿真平臺的建立
利用Matlab與AMEsim的聯合仿真技術,將在AMEsim中建立的液壓系統模型與在Matlab中建立的7自由度整車模型及ESP控制器連接,建立ESP聯合仿真平臺,如圖15所示。
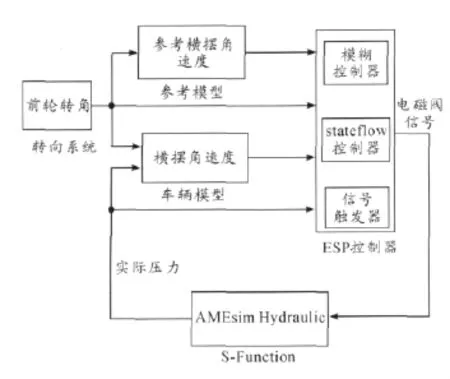
圖15 聯合仿真框圖
仿真系統以前輪轉角作為輸入,以橫擺角速度作為控制變量,二自由度車輛模型作為參考模型。ESP控制器包括模糊控制器、stateflow控制器和信號觸發器。模糊控制器以橫擺角速度差值作為輸入,以目標橫擺力矩作為輸出;stateflow以前輪轉角及橫擺角速度差值作為輸入進行四通道制動力分配;信號觸發器用于觸發電磁閥信號。在AMEsim中所建立的液壓模型以S函數的形式嵌入到整車仿真系統中,使用SimulCosim接口形式進行通訊,將4個輪缸的壓力輸入到車輛模型,將控制器輸出的8個電磁閥信號輸入到液壓系統中。通過所建立的聯合仿真平臺,可以方便地對車輛模型、控制器及液壓系統進行修改及匹配,完成ESP的快速原型設計。
4.2 仿真結果及分析
通過所建立的聯合仿真平臺,以某乘用車為例,對整車模型進行仿真。
仿真工況1:車速為90 km/h,道路為附著系數為0.4的濕滑路面,前輪轉角為2°,頻率為0.5 Hz的正弦信號輸入。仿真結果如圖16~18所示。
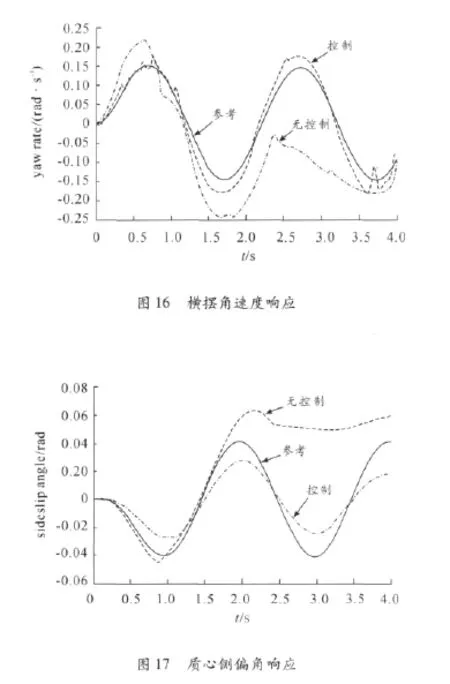
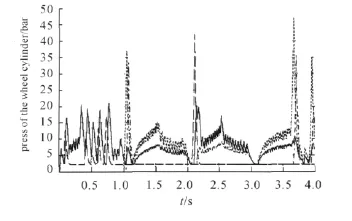
圖18 輪缸壓力
從仿真結果可以看出,沒有ESP控制的車輛產生了很大的橫擺角速度和質心側偏角,此時車輛穩定性差,處于危險狀態。經過ESP控制的車輛,其輪缸液壓制動系統可快速響應,使橫擺角速度和質心側偏角都得到了較好控制,提高了汽車的穩定性。
5 結束語
在AMEsim仿真平臺中根據汽車操縱穩定性控制系統的工作原理,建立了ESP液壓控制系統仿真模型,并分析了主要元件的動態響應性能。利用Matlab與AMEsim接口技術,建立了ESP聯合仿真平臺。基于此平臺,以某款乘用車為例,對其不同行駛工況進行仿真。仿真結果表明,所建立的液壓控制系統結構合理,聯合仿真平臺有效,ESP提高了汽車的操縱穩定性。該平臺的建立也為下一步搭建ESP硬件在環實時仿真平臺及實車試驗奠定了基礎。
[1]Yoshiyuki Yasui,Kenji Tozu,Noriaki Hattori,et al..Improvement of Vehicle Directional Stability for Transient Steering Maneuvers Using Active Brake Control[J].SAE paper,1996(4):485.
[2]Kihong Park,Seung-Jin Heo,Inho Baek.Controller design for improving lateral vehicle dynamics stability[J].SAE Review,2001,22:481 -486.
[3]李渭軍,張偉.SX6733GE81城市客車液壓助力轉向系統的匹配設計[J].客車技術與研究,2011(3):23-25.
[4]謝敏松.汽車ESP液壓系統動態特性研究[D].重慶:重慶大學,2007.
[5]劉巍.輕型汽車轉向穩定性控制算法及硬件在環試驗臺研究[D].長春:吉林大學,2007.
[6]付永領.AMEsim系統建模和仿真從入門到精通[M].北京:北京航空航天大學出版社,2006.
[7]AMESim .AMESim 4.2 User Manual[Z].[S.l.]:IMAGINE,2004.
[8]謝劍暉.汽車ESP液壓調節器建模與控制策略分析[D].長春:吉林大學,2008.
[9]祁雪樂,宋健,王會義.基于AMESim的汽車ESP液壓控制系統建模與分析[J].機床與液壓,2005(8):115-122.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
