水輪發電機并網裝置通訊與測控軟件的開發
2012-06-03 12:42:40胡麗杰王洪泉
大電機技術 2012年5期
胡麗杰,劉 瑩,梁 彬,王洪泉,高 尚,韓 波
(哈爾濱大電機研究所,哈爾濱 150040)
前言
隨著水電事業的蓬勃發展,機組容量不斷增大,機組和電網的安全運行及穩定性問題越來越引起關注。如果發電機由于某種原因運行在非正常情況下,可能會損壞機組,甚至會危及電網運行,以至于造成系統崩潰。這樣,對電機設計就有一定的要求。由大電機研究所自主開發研制的水輪發電機電磁模型系統可以進行真機難以進行的各種機網特性的實驗,對電機的設計及現場故障有一定的指導作用。
各種機網特性實驗皆在發電機側并到網側的工況下進行的,而發電機側并到網側時有時會發生非準同期并網,對電網造成沖擊[1]。本文針對發電機并網時相角差 0°~180°的工況進行試驗,而發電機側并到網側是由上位計算機基于圖形化編程語言 LabVIEW 編寫的通訊與測控軟件發出設置、控制、監控以及數據處理等各種命令包給并網裝置及并網裝置接收到命令包后協同工作實現的。首先,由水輪發電機電磁模型測控系統調節發電機側到額定電壓與額定轉速(頻率);然后,由上位計算機測控軟件遵循 UDP通信協議發送啟動命令包啟動并網裝置。并網裝置不僅對發電機側與網側進行電壓與頻率測量,而且對發電機側的電壓與頻率進行微調使其與網側的電壓與頻率在容錯范圍內符合并網要求;最后,并網裝置不斷地檢測電機側與網側的相角差,在所設置的相角差出現時并網裝置自動發出信號,斷路器主觸點閉合實現發電機并網。
1 UDP協議
UDP協議的全稱是用戶數據包協議[2]。它具有無連接,通信效率高,一次傳送少量數據的特點。而并網裝置的通信特點恰好符合UDP協議的特點,在發電機達到額定轉速,端部輸出額定電壓時裝置投入工作,通訊與測控軟件發出打包指令,裝置經CRC校驗[3]無誤時返回數據包,進行并網過程,此過程數據量不多,并網成功后裝置閉鎖,工作結束。
1.1 應用LabVIEW編寫的UDP通訊程序框圖
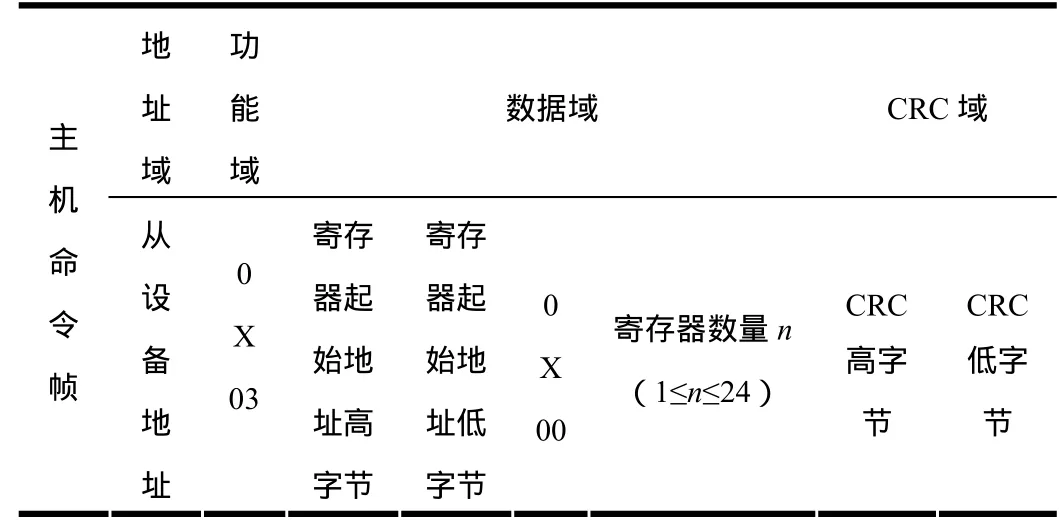
表1 讀寄存器命令幀
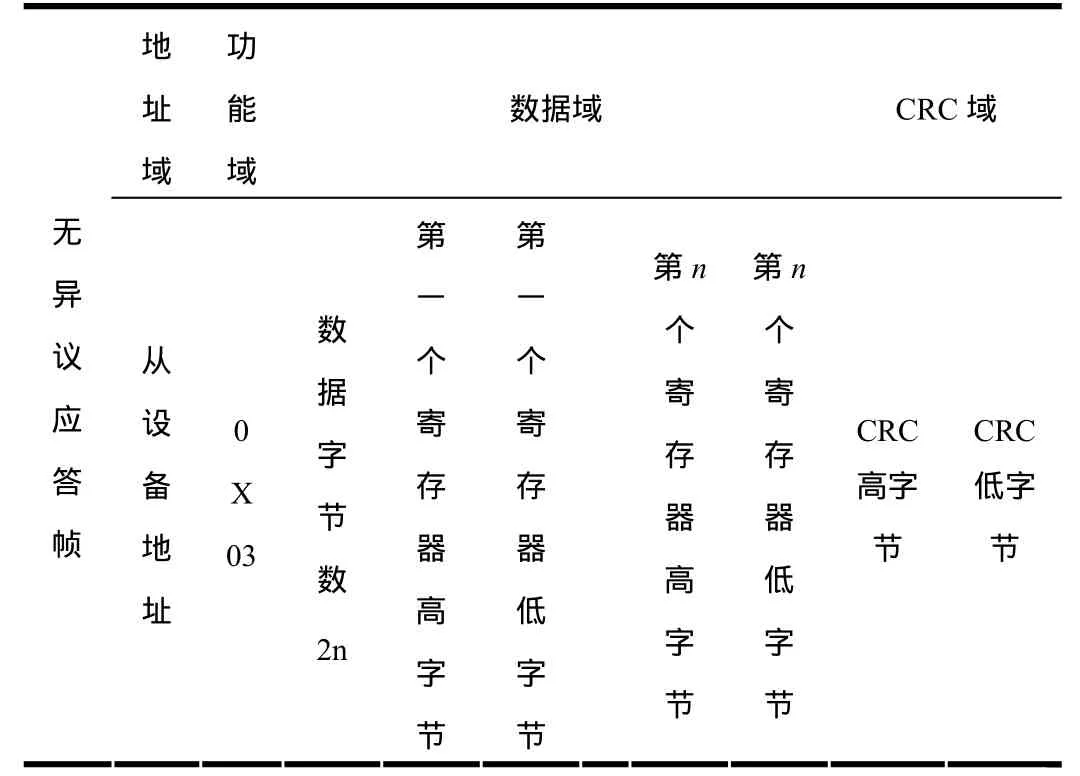
表2 無異議應答幀
本文上位計算機與并網裝置進行通訊時,上位計算機多是以主態與并網裝置進行通訊。上位計算機發送打包命令給并網裝置,當并網裝置對上位計算機發送來的命令包無異議時會返回應答包。以讀寄存器命令為例,上位計算機所發命令幀如表1所示,并網裝置無異議應答幀如表2所示。
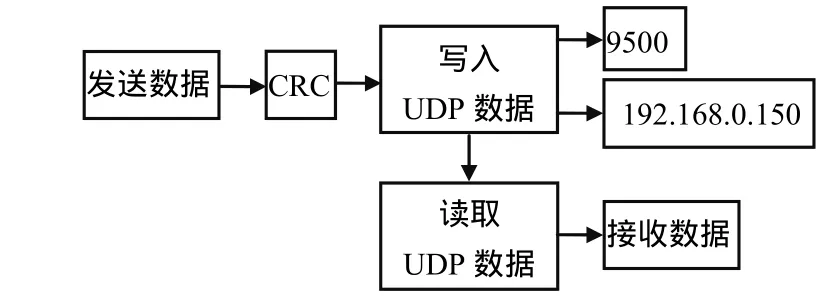
圖1 UDP通訊程序框圖
在用LabVIEW編寫UDP通訊程序時,要用寫入和讀取UDP數據通訊控件。將控件調入后,還需編寫并網裝置所使用的端口9500,與上位計算機通訊可以設置的IP地址192.168.0.150,以及根據UDP協議命令幀格式所發送的數據包。在并網裝置接收到上位計算機所發送的數據包后對其進行CRC校驗,無異議時向上位計算機返回數據包,上位計算機再對并網裝置所返回的數據包進行讀取,為了解決整個過程的時序問題,在編寫程序時采用順序結構[4]。UDP通訊程序框圖如圖1所示。
在CRC校驗算法中采用公式節點的程序結構。公式節點基本上彌補了圖形化開發語言相對于文本語言的缺陷,其語法與C語言基本相同,圖1中CRC算法[5]子程序框圖如圖2所示。
2 通訊與測控軟件結構框圖
并網裝置通訊與測控軟件結構框圖如圖3所示,包括界面管理模塊、初始化模塊、運行監視模塊、事件讀取模塊。其中,初始化模塊包括裝置參數設置模塊、同期參數設置模塊,此兩模塊皆復位后方可生效;運行監視模塊在并網過程中是核心模塊,可以實時監視并網的整個過程;事件讀取模塊記錄并網過程中網側與發電機側的電壓變化。

圖3 并網裝置通訊與測控軟件框圖
3 通訊與測控軟件界面
在軟件的編程過程中,人機界面非常重要,因為它直接與操作員產生信息交流,友好的人機界面要求能真實再現測控設備的狀態以及準確地采集存儲所需參數的數據波形,這主要依靠LabVIEW的控件組合及原代碼完成。整個人機界面包括誤同期并網試驗監測系統主控界面、裝置參數初始化界面、誤同期參數初始化界面、運行監視界面、錄波事件界面,各畫面間可以相互切換。當然也可根據用戶習慣編輯不同的人機界面,具有很好的靈活性。并網裝置通訊與測控軟件主控界面如圖4所示。

圖4 并網裝置通訊與測控軟件主控界面
運行監視界面如圖5所示,可以實時監測并網前后的過程,是整個通訊與測控軟件的核心部分。最醒目的表盤式同步表被平均分成36份,每份表示相角差為10°。當電機側頻率高于網側頻率時,指針順時針轉;反之,逆時針旋轉。同步表左側的柱狀圖,可以直觀地顯示允許頻差范圍內頻差的大小。當頻差為正值時,說明電機側頻率高于網側頻率;反之,電機側頻率低于網側頻率。為了防止發電機從網側吸收有功功率,我們將電機側頻率設置成高于網側頻率[6]。同理,同步表右側的柱狀圖顯示的是允許壓差范圍內壓差的大小,為了防止發電機從網側吸收無功功率,將電機側電壓設置成高于網側電壓;同時,顯示電機側、網側的頻率、頻差、電壓、壓差、相角差的數據;并且,可以改變相角差及相角方向,防止設置的相角差及相角方向與所要設置的不同,不僅更新相角差,還要進行相角差的讀取。
首先,水輪發電機電磁模型測控系統調節發電機側到額定電壓與額定轉速(頻率)。其次,投入并網裝置,直到“就緒”指示燈亮,按下“啟動同期”按鈕,一些指示燈會根據當前工況實時顯示電機側或網側頻率、電壓的高低。并網裝置會根據壓差、頻差的高低給出調頻、調壓信號,直到頻差、壓差在允許范圍內,“同期過程中”指示燈亮。等待所設置的相角差出現,同時同步表也實時顯示相角差,在所設置的相角差出現時提前斷路器合閘時間長并網裝置發出合閘信號,待到相角差出現時斷路器主觸點恰好閉合,并網裝置檢測到斷路器輔助節點合閘的信息后“并網成功”指示燈亮,完成并網。最后,并網裝置閉鎖,退出系統,完成自己的使命。在下一次并網前,先按下“復位”按鈕,對裝置進行復位。其他界面不再詳述。

圖5 并網裝置通訊與測控軟件運行監視界面
4 試驗結果與分析
相角差0°~180°并網裝置通訊與測控軟件在水輪發電機電磁模型系統中已得到成功應用。由于并網點在電機側與網側之間有變壓器,所以有30°的相角補償。選取典型相角差下電壓波形圖如圖6~8。
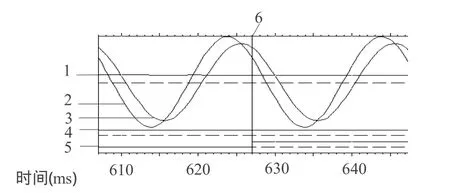
圖6 0o相角差并網電壓波形

圖7 120°相角差并網電壓波形
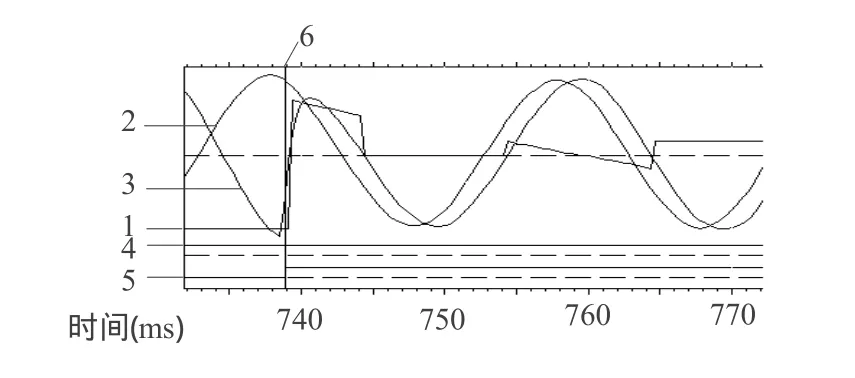
圖8 180o相角差并網電壓波形
5 結論
本文在 LabVIEW 軟件平臺下編寫的并網裝置通訊與測控軟件,在電磁模型系統中的應用表明,此通訊與測控軟件具有開發時間短、界面友好、操作簡單、模塊化、可移植性及應用可靠性等特點。并從相角差0°~180°并網的電壓波形可得,不同相角差對網側及發電機側的沖擊不同,其波形對電站現場故障分析有一定的指導作用。
[1]吳希再, 熊信銀, 張國強. 電力工程[M]. 華中科技大學出版社, 1996.
[2]陳錫輝, 張銀鴻. LabVIEW8.20程序設計從入門到精通[M]. 清華大學出版社, 2007.
[3]Rick Bitter, Taqi Mohiuddin, Matt Nawrocki,LabVIEW Advanced Programming Techniques[M].CRC Press. 2006.
[4]Jon Conway, Steve Watts. A Software Engineering Approach to LabVIEW[M]. Prentice Hall PTR.2004.
[5]楊樂平, 李海濤, 趙勇. LabVIEW 高級程序設計[M].清華大學出版社, 2003.
[6]Robert J. Best, D. John Morrow, Peter A. Crossley,Out-of-Phase Synchronization of a Small Alternator[J], IEEE Proceedings, Vol. 137, pp 435–443, September 2007;
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
當代陜西(2020年13期)2020-08-24 08:22:02
制造技術與機床(2017年5期)2018-01-19 02:49:17
金秋(2017年4期)2017-06-07 08:22:16
大電機技術(2017年3期)2017-06-05 09:36:02
中國材料進展(2016年10期)2016-12-26 06:50:20
濰坊學院學報(2016年2期)2016-12-01 13:00:11
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
新聞傳播(2015年11期)2015-07-18 11:15:04