飛機垂尾抖振極限載荷預測方法
2012-06-05 10:20:20楊智春
振動與沖擊 2012年13期
楊智春,陳 帥,金 偉
(1.西北工業大學 航空學院結構動力學與控制研究所,西安 710072;2.成都飛機設計研究所 強度部,成都 610041)
飛機垂尾抖振是典型的氣動彈性耦合效應下隨機振動問題。以美國 F/A -22[1-2]和 F/A -18 飛機[3-6]為代表的許多雙垂尾布局的先進戰斗機,在大攻角飛行時承受著嚴重的抖振載荷,研究發現這正是引起垂尾結構部件疲勞損傷的根源之一[7],因而在高性能戰斗機設計中,垂尾抖振備受關注。雖已有研究表明,垂尾抖振產生的根源在于飛機設計時采用的機翼前緣大邊條與雙垂尾布局,但是無論是采用被動的抖振減緩措施[8-9]或主動的抖振控制方法[10-11],都不能完全抑制抖振載荷。因此,垂尾抖振極限載荷的預測結果,為相關部件結構設計與強度校核提供了重要依據。
由于對先進戰斗機高速、大機動飛行性能的要求,在該類飛機全包線范圍內出現抖振不可避免;因此,當考慮抖振載荷影響時(特別是對于某些抖振效應明顯的飛行狀態),飛機強度估算與校核中均須在原有靜載荷基礎上疊加上飛機抖振載荷的影響成分,以保證飛機結構在全包線飛行中具有足夠的強度。然而,在進行極限載荷預測時,若單純由最大機動載荷與最大抖振載荷疊加獲取抖振飛行狀態的極限載荷值,將使設計過于保守,不能充分利用結構性能;若忽略抖振載荷,則會使設計過于冒險因而招致非常嚴重的后果。此外,抖振載荷的測點數目不足及載荷測試類型有限等也會給抖振極限載荷預測帶來困難。為解決這些問題,本文首先對可能出現垂尾抖振飛機飛行狀態進行子狀態劃分,然后對抖振載荷進行重構,以解決實際工程中抖振載荷的測點數目不足與載荷測試類型有限等問題,最后基于建立的抖振飛行子狀態載荷概率分布模型,建立飛機垂尾抖振極限載荷的預測方法,以給出恰當的極限載荷結果。
1 飛機垂尾抖振飛行子狀態劃分
由于飛機垂尾抖振載荷是一種隨機激勵載荷,且這種載荷與飛機的飛行狀態密切相關,因此可將飛機垂尾出現抖振的包線范圍按照相關飛行狀態參數劃分為若干子狀態,并假設各飛行子狀態內抖振載荷滿足相同的概率分布規律。
通常抖振飛行子狀態按飛機飛行的攻角α、動壓q、馬赫數M及側滑角 β進行劃分[1],具體步驟如圖1所示:先分別將可能出現抖振的攻角范圍、動壓范圍、馬赫數范圍及側滑角范圍分為若干子區間;后將不同的攻角、動壓、馬赫數及側滑角子區間進行組合;再根據對任務剖面的分析,剔除不可能出現的飛行子狀態及不可能出現垂尾抖振的飛行子狀態,最后采用四維量B(i,j,m,n)對各抖振飛行子狀態載荷數據進行存儲定位(i為攻角子區間標號,j為動壓子區間標號,m為馬赫數子區間標號,n為側滑角子區間標號),以此建立抖振載荷數據庫的數據存儲關系。
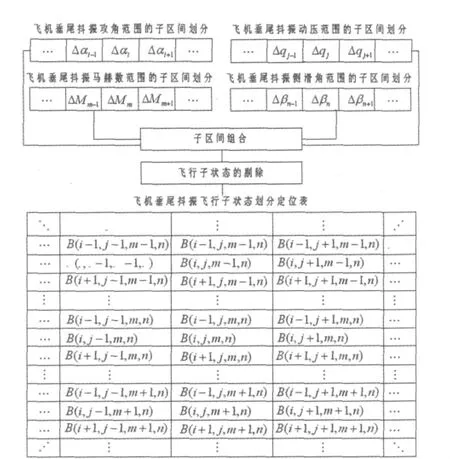
圖1 飛機垂尾抖振的飛行子狀態劃分Fig.1 Flight subcase split of aircraft vertical tail buffeting
2 抖振極限載荷預測方法
2.1 基于有限測試響應的抖振載荷重構
抖振載荷數據的獲取途徑主要有兩種:① 有限元仿真計算,② 試驗測試。在初始設計階段,一般由有限元仿真計算抖振載荷數據,通過這種途徑獲得的載荷具有信息較完整的優點,因此只需要分析結構上同一位置在不同抖振飛行子狀態下的臨界載荷,進而得到該位置的抖振極限載荷,其它位置依此類推;然而,在試驗校核階段需要通過測試獲得相應的數據,由于測試條件的限制,測試位置十分有限,需要根據測試位置的載荷識別(重構)未測位置的載荷,然后按照同樣方法進行考慮抖振因素的極限載荷預測。
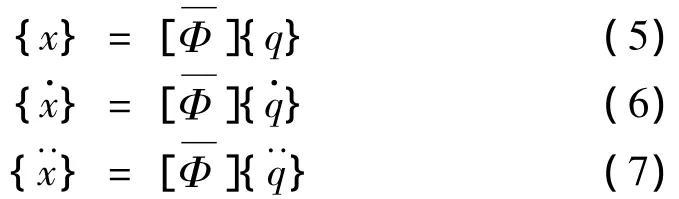
通常抖振響應測試得到的是加速度,而加速度響應從物理坐標向模態坐標的轉換關系為:

通常,處理后的[Φ]并非方陣,故由廣義逆求解得保留的模態加速度向量{}為:

有限元方法中,響應可用節點位移通過變換獲取,故首先由數值積分求得保留模態速度向量為:

再次積分,可求得保留模態位移響應為:

考慮到積分時速度與位移初值無法直接確定,則由式(3)與式(4)得到的為通解,故需要增加約束條件才能得到{}與{q}的定解。在此利用加速度、速度和位移間的相位關系進行約束,具體為:①模態加速度峰值時的零模態速度約束,②模態速度峰值時的零模態位移約束。
最后,由模態疊加原理得:
由有限元法中,節點位移{x}與應變{ε}或應力{σ}之間轉換關系可得:

其中,[B]為幾何矩陣,[D]為彈性矩陣,[S]為應力矩陣。由單元形函數即可求得所需內載荷。
同時將響應代入其運動基本方程還能得外激勵載荷 {f}為:

其中,[M],[C]和[K]分別為結構的質量矩陣、阻尼矩陣與剛度矩陣。
按照圖2所示流程,就可用有限測點處的抖振響應重構出飛機垂尾結構的抖振載荷,包括內載荷(動響應,即位移、速度、加速度、應變和應力)及外載荷(即外激勵載荷)。
2.2 抖振飛行子狀態載荷概率模型
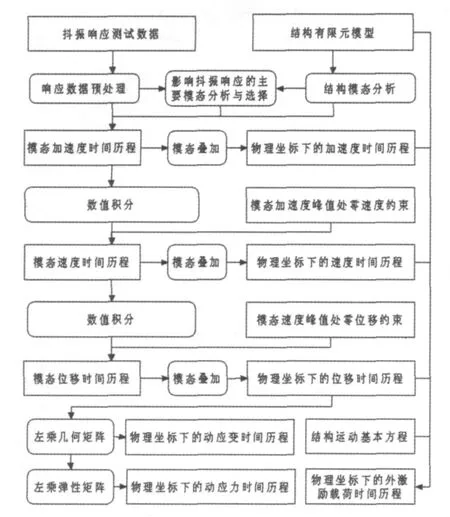
圖2 抖振載荷的重構Fig.2 Reconstruction of buffet loads
考慮到飛機垂尾抖振載荷的隨機性,通常需要利用統計方法建立抖振載荷的概率模型以降低分散性,并進行抖振極限載荷估算。因此統計變量并非各時刻對應的載荷值,而應選擇載荷峰谷值進行統計。
選去均值處理后的抖振飛行子狀態下的載荷峰值谷值絕對值Y與該狀態下抖振載荷均方根RMS的比值作為無量綱化的統計量Z[12],即:

選擇合適的飛機垂尾抖振載荷概率分布假設[13],即可建立合適的反映抖振載荷峰谷值特性的概率分布模型,且可通過概率分布參數的最大似然估計,確定相應假設下統計量Z超過某一給定臨界值ZcrB時的概率:

該概率值由下式得到:

其中,Pa為飛機設計中按要求給出的全壽命內可接受超過設定抖振載荷次數[1],P(ZcrB)(即PcrB)為某抖振飛行子狀態下抖振載荷超過給定值概率,PB為全壽命內該抖振飛行子狀態載荷總循環次數,fB和tB分別為通過飛行任務剖面分析給出的全壽命內該抖振飛行子狀態載荷循環頻率及其出現的總時間。
聯立式(12)和式(13),得:


其中,P-1表示函數P(Z)的反函數,YcrB為該抖振飛行子狀態對應的臨界抖振載荷絕對值。
2.3 抖振飛行子狀態臨界載荷確定
按照疊加原理合成各節點總載荷,即:

其中:{Y}為節點總載荷向量;{YM}為節點機動載荷向量;{YB}為節點抖振載荷向量;fsafe為安全系數,一般取fsafe=1.5。注意,此處的載荷既可以是內載荷(動響應,即位移、速度、加速度、應變和應力),又可以是外載荷(即外激勵載荷)。
為確定抖振極限載荷,將式(15)得到的各子狀態抖振臨界載荷向量代入式(16),得到穿越線上下臨界載荷為:

由于不同狀態下不同位置的機動載荷向量{YM}與臨界抖振載荷向量{YcrB}的相對大小及方向各不相同,因此,每個節點上可由式(17)計算得到兩個臨界載荷Ycr,該臨界載荷中,較大者為上臨界載荷,較小者為下臨界載荷。由此可得到各節點上抖振飛行子狀態穿越線上下臨界載荷。
2.4 抖振極限載荷確定
取第k個節點上所有抖振子狀態穿越線臨界載荷Ycr所組成的臨界載荷集合{Ycr}k中最小元素與最大元素,即:

則第k個節點抖振極限載荷Yultimate,k滿足:
第1步:根據組別T分層,分別對Y(成功與否)做Logistic回歸,得到兩個Logistic模型。即當T=1時得到模型A,當T=0時得到模型B。



考慮抖振影響的節點載荷Yk滿足:

其它節點的處理與此相同,不再贅述。
3 應用實例分析
某型飛機在給定抖振飛行子狀態下某節點抖振載荷(已無量綱化)時間歷程數據如圖3所示。
飛機垂尾抖振載荷概率分布假設選擇威布爾分布[13],為滿足此飛行狀態下該節點抖振載荷時程數據的處理要求,由參數的最大似然估計得統計量Z超過某一給定臨界值 ZcrB時的概率為[12-13]:
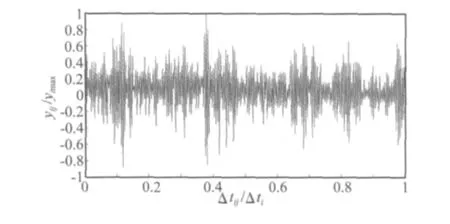
圖3 某型飛機在給定子狀態下某節點抖振載荷時間歷程Fig.3 Nodal load time history of buffet at a given subcase

則:
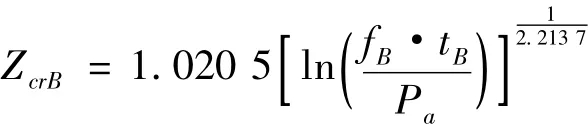
進而:

通常,飛機全壽命范圍內可接受的穿越次數取Pa=1 ×10-4次[1],載荷均方根為 RMS=0.3840,且 PB=fB·tB=165240次,則此飛行狀態下該節點的臨界抖振載荷YcrB=1.5579。機動載荷YM=21,則其穿越線上下臨界載荷為:

類似地,可得到所選臨界載荷狀態該節點的穿越線臨界載荷Ycr,如表1所示。
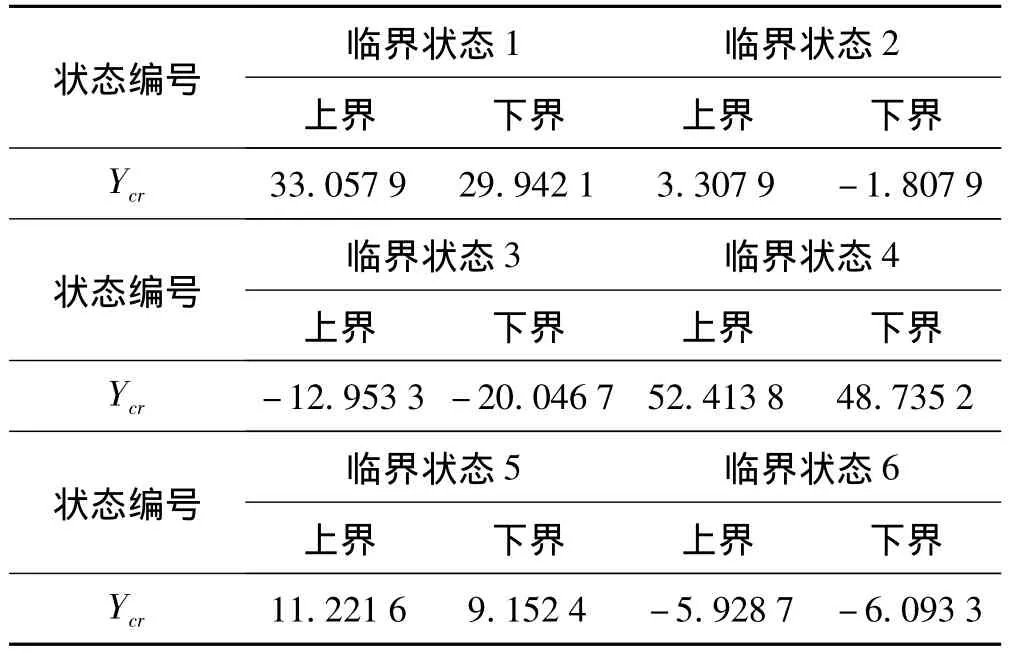
表1 某節點的抖振臨界載荷Tab.1 Critical buffet loads at a given node
因此,該節點上所有抖振飛行子狀態穿越線臨界載荷Ycr組成的臨界載荷集合{Ycr}k為:
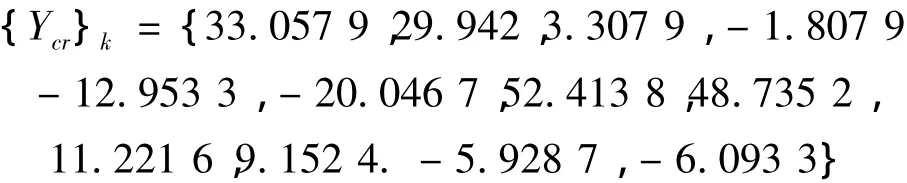
顯然,其極限載荷為:

抖振載荷作用時,第k個節點的載荷范圍滿足:

采用同樣的方法,可獲得不同節點上的極限載荷,進而為結構強度校核提供載荷依據。
4 結論
為滿足先進戰斗機高速、大機動飛行性能的要求,在飛機設計的強度估算與校核中必須考慮抖振載荷影響,以保證飛機結構在全包線飛行中具有足夠的結構強度,本文提出的飛機垂尾抖振極限載荷預測方法,具有如下特點:
(1)提出的抖振載荷重構方法,可有效地解決實際工程中抖振載荷的測點數目不足與載荷測試類型有限等問題,其重構載荷類型既可以是內載荷(動響應,即位移、速度、加速度、應變和應力),又可以是外載荷(即外激勵載荷),滿足了不同的應用需求。
(2)由于飛機垂尾的抖振載荷規律隨其飛行狀態的變化而改變,且各飛行狀態在全壽命中出現的比例不盡相同,因此在抖振飛行子狀態劃分后,對子狀態內數據統計規律的分析結果,便于結合飛行剖面分析而應用于后續的抖振疲勞壽命估算與疲勞載荷譜編制,便于建立抖振載荷數據庫中數據的存儲關系,有利于數據分類存儲與搜索定位。
(3)根據不同抖振飛行子狀態下相應機動載荷與抖振載荷疊加組合的最值情況(即兩者方向相同與相反的情況)篩選抖振極限載荷,既避免了由單純采用最大機動載荷與最大抖振載荷疊加所獲取的抖振極限載荷值過于保守的問題,又解決了忽略抖振載荷所確定的極限載荷值過于冒險的問題。
[1]Patel S R,Black C L,Anderson W A,et al.F/A -22 vertical tail buffet strength certification[C].AIAA- 2005-2292, 46th AIAA/ASME/ASCE/AHS/ASC Structures,StructuralDynamics & Materials Conference, Austin,Texas,2005.
[2]Patel S R,Black C L.Statistical modeling of F/A-22 flight test buffet data for probabilistic analysis[C].46th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics &Materials Conference,2005.
[3]Zimmerman N H,Ferman M A.Prediction of tail buffet loads for design application[J].Vols.I and II,Naval Air Development Center NADC-88043-60,1987.
[4]Ferman M A,Patel S R,Zimmerman N H,et al.A unified approach to buffet response of fighter aircraft empennage[R].Aircraft Dynamics Loads due to Flow Separation,AGARD Report CP- 483, North AtlanticTreatyOrganization,Sorrento,Italy,September,1990.
[5]Triplett W E.Pressure measurements on twin vertical tails in buffeting flows[R].AFWAL Report AFFDL TR-82-3015,1981.
[6]Shah G H,Grafton S B,Guynn M D,et al.Effect of vortex flow characteristics on tail buffet and high angle of attack aerodynamics of a twin tail fighter configuration[C].High Angle of Attack Technology Conference,1990.
[7]Lee B H K.Vertical tail buffeting of fighter aircraft[J].Progress in Aerospace Sciences,2000,36:193 -279.
[8]Sheta E F.Alleviation of vertical tail buffeting of F/A-18 aircraft[J].Journal of Aircraft,2004,41(2):322 - 330.
[9]Sheta E F,Huttsell L J.Numerical analysis of F/A -18 vertical Tail[C].AIAA 2001 - 1664.42nd AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics &Materials Conference Seattle,WA - April 16 -19,2001.
[10]Sheta E F,Moses R W,Huttsell L J,et al.Active control ofF/A-18 vertical tail buffeting using piezoelectric actuators[C].AIAA 2003-1887,44th AIAA/ASME/ASCE/AHS Structures,Structural Dynamics & Materials Conference,Norfolk,Virginia,2003.
[11]Roberts P,Yang B J,Hanagud S,et al.Adaptive control of F/A -18 vertical tail buffeting[C].AIAA 2006 -6345,AIAA Guidance,Navigation,and Control Conference and Exhibit,Keystone,Colorado,2006.
[12]陳 帥,楊智春,李 斌.飛機抖振響應數據處理與分析方法[J].振動與沖擊,2011,30(6):15-19.
[13]楊智春,陳 帥,李 斌.基于統計與粗糙集理論的飛機垂尾抖振載荷分布假設選擇與評價方法[J].振動與沖擊,2012,31(5):6-11.
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00