奇異值分解故障檢測法在捷聯慣導中的研究*
2012-06-07 01:50:28杜軍波
艦船電子工程 2012年1期
霍 庚 杜軍波
(92941部隊95分隊 葫蘆島 125001)
1 引言
捷聯慣導是一種自主式導航系統,它絕對保密且不受外界干擾,廣泛應用于航空、航天等領域[1]。陀螺儀是其核心元件,只要給定初始信息,便可根據陀螺儀測量的角速率、加速度計測量的比力等信息,通過計算機實時地計算出各種載體姿態參數[2]。故障檢測及隔離(FaultDetection and Isolation,簡稱FDI)[3]是保證系統正常工作的關鍵,只有有效地對系統故障進行診斷,然后進行故障處理,才能保證系統的正常工作。故障檢測及隔離(FDI)技術是一項專門的技術,在不同的應用領域,與不同的學科相結合產生了多種故障診斷方法。慣導系統測量單元級故障分為慣性器件硬故障檢測和軟故障檢測。對硬故障檢測通常采用直接比較法,構造余度慣性儀表,以增加儀表的故障容許次數。構成余度慣性組件的器件數目要在四個以上,按一定規律配置,按儀表測量值之間的線性相關性質,列出其所有的奇偶方程式。如果所有陀螺都正常工作,則全部奇偶方程式都能滿足。若出現陀螺故障,則相應的奇偶方程式便不成立。對慣性器件軟故障檢測采用廣義似然比檢測。對系統的故障作如下假設[4]:1)同一時刻僅發生一個故障;2)故障是常值型故障,即只是誤差的均值發生變化而其它統計特性不變。這兩點假設對大多數類型的故障是符合的。
2 SVD算法原理
對于慣性導航系統,陀螺儀和加速度計是其關鍵的測量元件[5],其可靠性是整個系統中最重要的指標。如何檢測慣性元器件是否發生故障?如何將檢測出的故障進行隔離?本文結合慣導系統的硬故障和軟故障,將采用SVD算法原理進行分析研究。
假定余度傳感器的配置有m個傳感器,其量測方程中僅含有噪聲干擾作用,即

式中X∈Rn是待測的導航狀態(加速度或角速率),Z∈Rm是m個傳感器的測量值,(m≥n),H是傳感器配置的幾何矩陣,ε是高斯白噪聲,由配置矩陣H∈Rm×n,且知rankH=r,可知對其進行奇異值分解有

其中UU*=U*U=Im,VV*=V*V=In,∑ =diag{λ1,λ2,…,λr},對 U 作 進 一 步 分 解 U =[U1U2],Λ=[∑ 0]TV=Im,當系統發生故障時,其量測方程為

式中bf為故障向量,其對應的故障傳感器的元不為零,其它的元均為零。
將上述分解的方程代入系統發生故障的量測方程中得

左端乘以U*得,U*Z=ΛU*X+U*bf+U*ε,
構造奇偶向量P=U2U*2Z=U2(bf+ε)
于是奇偶向量與狀態變量無關,當系統發生故障時,奇偶向量不僅是噪聲的函數[6],而且是故障的函數。正是奇偶向量在噪聲和無噪聲時表現不一樣,才使故障診斷得以實現。奇異值分解法即是由奇偶向量根據不同的原則構造了故障檢測和隔離函數,來實現不同情況下的故障檢測。該方法不僅能檢測出單個陀螺發生的故障,而且還能檢測出兩個陀螺同時發生故障的情況。具體算法如下:
1)由配置矩陣H計算U2;
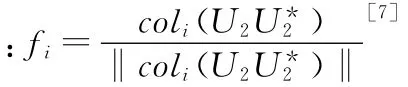
2)計算一個陀螺或兩個陀螺同時發生故障時的參考向量f1,f2,…,fi;
3)K=argmax(PTfi);
3 SVD算法在慣導系統中的應用
下面以6個單自由度光纖陀螺結構為例。易知6個單自由度光纖陀螺的配置矩陣[8]:
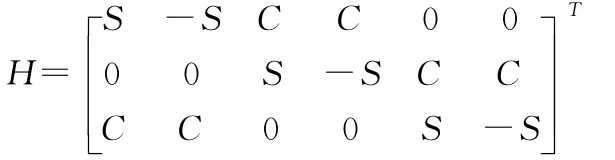
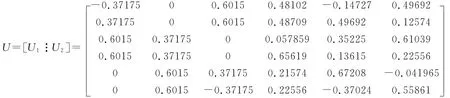
其中s=sinα,c=cosα,2α=63°26′5.8″,則

對H進行奇異值分解[9]后得到的U為
對于6個單自由度的光纖陀螺,列出一個和兩個陀螺同時發生故障時對應的故障參考向量,如表1所示。其中1表示1號陀螺,(1,2)表示1號陀螺和2號陀螺。
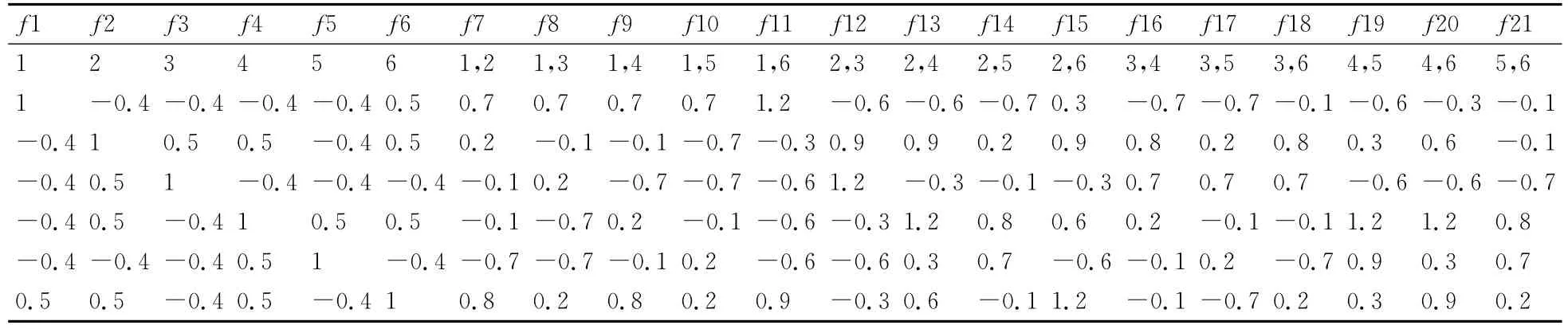
表1 陀螺儀故障參考向量
4 仿真試驗
4.1 一個陀螺故障檢測
由故障檢測函數服從自由度為6的x2分布[10],給定誤檢率為1%,可得門限Th=16.812。假設第一個陀螺第1000個采樣點(設陀螺采樣周期為10ms)時加上故障信號(假設故障信號為階躍信號):bf=5(°)/s。故障檢測函數圖如圖1所示,從圖中可以看出,在第1000個點時,故障檢測函數明顯超出了門限Th=16.812的值,并且一直持續,考慮到實際的導航數據采集存在一定的干擾,可以設定一時間值,若檢測函數超出門限的時間大于該時間值,則判斷為陀螺故障。
4.2 兩個陀螺故障檢測
兩個陀螺同時發生故障的概率很低,但仍然有可能發生,因此,針對兩個陀螺同時發生故障的情況,用SVD方法
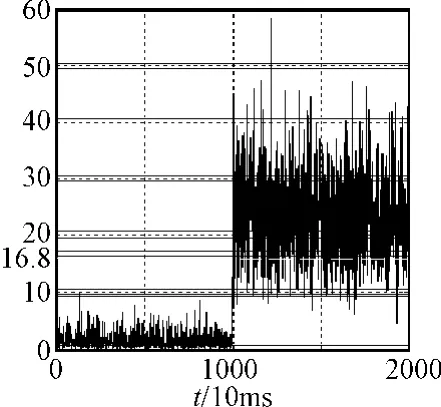
圖1 DFD1故障檢測函數圖
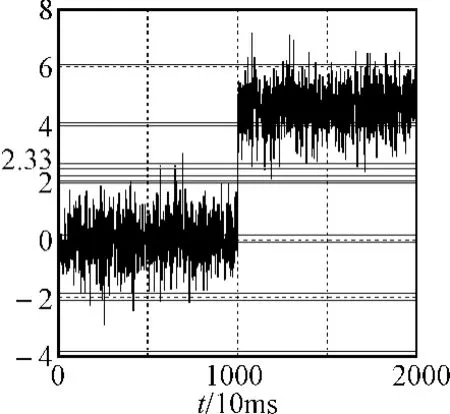
圖2 DFD7故障檢測函數圖
進行了仿真。給定誤警率a=1%,可得門限為Th=2.33。假設1號陀螺和2號陀螺同時在第1000個采樣點(設陀螺采樣周期為10ms)時發生故障,即在第1000個采樣點時加上故障信號(假設故障信號為階躍信號):bf=5(°)/s。對其第7個故障檢測函數DFD7進行判別,如圖2所示,從圖中可以看出,在第1000個點時,故障檢測函數DFD7明顯超出了門限值Th=2.33,并且一直持續,考慮到實際的導航數據采集存在一定的干擾,可以設定一時間值,若檢測函數超出門限的時間大于該時間值,則判斷為陀螺故障。由故障檢測函數DFD7是1號陀螺故障向量和2號陀螺故障向量的函數[12],可以判定要么1號陀螺或2號陀螺中一個發生故障,要么都發生故障。
采用列表法,列舉故障發生前后相臨的各個采樣點的值,如表2所示,其中橫坐標為采樣點數,縱坐標為故障陀螺的檢測函數。
從表2可知,故障發生后DFD7的值在第1000個采樣點后均超過了門限值Th=2.33,可以判斷1號陀螺或2號陀螺發生了故障。再判斷DFD1和DFD2,可知兩者的值在第1000個采樣點后也都超過了門限值。因此,可以肯定1號陀螺和2號陀螺均發生了故障。同時,觀察表2不難發現,1號陀螺和2號陀螺突變的時間點相同,故可以判定1號陀螺和2號陀螺是同時發生故障的。

表2 陀螺儀故障采樣判斷表
5 結語
本文首先深入研究了奇異值分解法的基本原理,針對硬故障和軟故障的不同特點,將奇異值分解法應用慣導系統中最重要的部件即陀螺儀的故障檢測中,通過仿真試驗獲得了較好的故障檢測效果。將SVD方法對慣性儀表進行有效的元件級故障檢測,能快速地進行故障隔離,增強了系統的可靠性,在實際的捷聯慣導系統檢測中具有更加廣泛的實用價值。
[1]L.Jetto,S.Longhi1,D.Vitali.Localization of a wheeled mobile robot by sensor data fusion based on a fuzzy logic adapted Kalman Filter[J].Control Engineering Practice 7,1999:763-771.
[2]J.Z.SASIADEK,Q.WANG,M.B.ZEREMBA.FUZZY ADAPTIVE KALMAN FILTERING FOR INS/GPS DATA FUSION[C]//Proceedings of the 15th IEEE International Symposium on Intelligent Control(ISIC 2000)Rio,Patras.GREECE,2000,7:17-19.
[3]吳太奇,鄧凱亮.一種改進的不適定問題奇異值分解法[J].武漢大學學報(信息科學版),2011(8):213-217.
[4]田曉東,韋錫華.小波分析在多傳感器組合導航故障檢測中的應用[J].青島大學學報,2002,17(4):66-68.
[5]龔瑞昆.離散小波變換在傳感器故障診斷中的應用[J].儀器儀表學報,2001,22(2):237-239.
[6]王仲生.一種基于知識的故障容錯控制系統[J].測控技術,1996(1):108-111.
[7]王德軍.故障診斷與容錯控制方法研究[D].長春:吉林大學,2005-01-31.
[8]錢華明.故障診斷與容錯技術及其在組合導航系統中的應用研究[D].哈爾濱:哈爾濱工程大學,2004,5.
[9]K.Qiu,J.Rong,X.Wu,et al.Robust Information Sharing Algorithm against Fault for Federated Filter[J].Chinese Journal of Sensor and actuators,2006,19(2):491-496.
[10]沈鵬,徐景碩,高揚.小波技術在組合導航系統故障診斷中的應用[J].飛行器測控學報.2008,6(15):220-225.
[11]戴邵武,馬長里,代海霞.北斗雙星/SINS組合導航中的捷聯慣導算法研究[J].計算機與數字工程,2010,38(10).
[12]王永超,黃智剛,孫國良.三種導航衛星故障識別方法的等價性研究[J].遙測遙控,2006,27(1):51-55.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21