基于DSP的開關磁阻電機調速系統研究與設計
2012-06-09 10:26:04陳運軍
電子設計工程 2012年19期
陳運軍
(四川信息職業技術學院 四川 廣元 628040)
開關磁阻電機是隨著現代電力電子技術、控制技術的發展而出現的一種新型電機,具有結構簡單、成本低廉、起動轉矩大及調速范圍寬等優點,具有很好的發展前景,已在工業生產中得到了廣泛的應用,被認為是在未來具有很強競爭力的一種調速電機。
開關磁阻電機的轉子與定子都是凸極結構,即雙凸極結構。轉子和定子鐵芯都由硅鋼片疊壓而成,轉子極上無繞組,定子極上安裝有集中繞組,轉子、定子極對數不相等。
開關磁阻電動機調速系統(SRD)主要由4部分組成,包括開關磁阻電機(SRM)、功率變換器、采樣反饋環節和控制器。SRM是實現機電能量轉換的部件,也是此系統區別于其他電動機調速系統的最主要標志[1]。
功率變換器提供開關磁阻電機運行所需要的能量,一般是由蓄電池或交流電經整流后得到的直流供電。采樣反饋環節包括電流檢測和位置檢測。控制器是整套調速系統的核心,處理反饋信號包括轉子位置和電流反饋信息,計算轉速,然后發出控制信號給功率變換器,實現功率變換器對開關磁阻電動機的驅動。
通過對以上4部分的控制,可很好的對開關磁阻電機調速進行控制,提高電機運行的穩定性和可靠性。
1 機電設備檢測終端系統硬件設計
整個系統采用TI公司的電機控制專用芯片TMS320LF 2812作為控制核心,系統的設計主要分為2大部分:上位機與下位機設計,本設計主要研究下位機部分設計,包括軟、硬件部分。系統的軟件設計基于DSP專用調試軟件CCS平臺用C語言編程,以完成開關磁阻電機各種控制算法。硬件設計部分包括:主電路功率變換器拓撲結構的選擇和吸收電路的設計、電流采樣部分的設計、位置檢測環節的設計、功率開關器件驅動電路的設計以及保護電路部分的設計等。
1.1 系統總體設計
圖1所示是本設計的開關磁阻電機調速系統的總體框架圖。主要包括上位機、SRM本體、功率變換、控制系統以及信號采樣部分五個環節;軟件主要實現位置計算、速度估算、PI控制等功能。虛線框內表示系統使用到的DSP芯片的模塊和軟件中所需要實現的功能。系統總體設計方案如下:上位機PC與下位機通過RS232串行接口進行通訊;功率變換系統主要包括不對稱橋式電路和橋式電路,采用IGBT作為功率開關器件,IGBT模塊內部自帶的二極管作為續流二極管,用EXB841作為IGBT的驅動芯片;控制器核心采用TI公司的電機控制專用芯片TMS320LF2812。系統的主電路電源采用三相交流電通過三相不控制整流獲得直流電源,系統的控制電源部分采用5 V、±15 V和24 V開關電源供電。
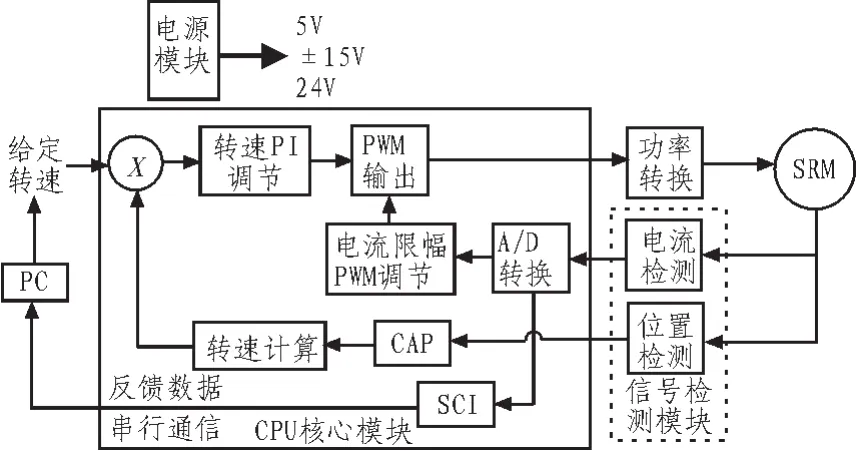
圖1 系統總體結構圖Fig.1 Structure diagram of the power control unit test system
主控制系統是將TMS320F2812核心系統、電流速度反饋系統、IGBT驅動系統、觸摸液晶屏等連接構成一個完整的系統并根據需要留有擴展接口以滿足日后對系統的升級和更新。電源芯片采用TI公司的雙路輸出低壓降穩壓器TPS767D301,可以輸出3.3 V和1.8 V電壓供給TMS320F2812使用,每個通道均可輸出高達1 A的電流。同時具有1.8 V同核延時200 ms供電的能力,是為TMS320F2812芯片設計的專用電源芯片。
1.2 IGBT驅動系統設計
驅動系統需要實現將TMS320F2812輸出的PWM信號進行隔離、放大并最終驅動IGBT工作;其次需要根據電流、速度反饋信號輸出的過流信號對IGBT驅動信號進行封鎖;最后可以根據IGBT集電極與射極之間的電壓檢測IGBT過流情況并將故障信號反饋給DSP。根據這一設計思路,首先選擇IGBT的驅動芯片EXB841,該芯片可以將低電平0 V的信號放大為0.5 V,將高電平5 V的信號放大為15 V。芯片內部集成有光耦隔離電路,可以將PWM信號與強電進行隔離。驅動信號頻率可以達到40~50 kHz,采用單電源供電,內部可以產生一個-5 V反偏壓。本系統SRM為三相電機,所以需要4個隔離電源對EXB841進行供電,3個上橋臂分別使用3個獨立的隔離電源進行供電,3個下橋臂使用一個獨立的隔離電源進行供電。由于TMS320F2812的通用I/O引腳的帶負載能力較小,因而在系統設計中需要對TMS320F2812輸出的PWM信號進行緩沖。本設計中為了在故障時可以封鎖DSP產生的PWM信號,將PWM信號與故障信號與后作為EXB841的輸入信號,同時將7路故障信號相與,送到延時電路進行處理,最后送給DSP。
1.3 功率變換電路設計
系統的功率變換系統包括不對稱功率電路和橋式電路。三相380 V交流電經過不控整流得到直流電作為功率變換器主電路供電電源,選用富士公司生產的6R1100G-160(100 A/1 600 V)不控整流模塊;功率變換系統的功率開關器件選用富士公司生產的2MBl25L.120模塊(兩相模塊25 A/1 200 V);IGBT模塊內部自帶的二極管作為各相繞組關斷時的續流二極管;供電電源上二并二串4個穩壓濾波電容(3 300 μF/400 VDC),在每個電容上并聯一個 30 kΩ 的水泥電阻,用來保證每個電容上電壓的相等。
開關磁阻電動機調速系統運行在額定工作條件下,其主開關元件IGBT需要在高電壓、大電流的環境下不斷切換,因此是整個系統最脆弱的環節之一。所以為保證整個系統正常運行,保護主開關器件,要使用緩沖電路保護每個主開關器件[2]。這里采用最常用的一種Snubber電路,它由一個電阻與一個二極管并聯,再與一個高壓電容串聯,如圖2所示。IGBT與Snubber電路并聯構成成最簡單的IGBT保護吸收電路,在這個電路中并聯電容Cs。將降低IGBT關斷時的損耗,并改善其在反偏壓工作條件下關斷時的伏安特性;電阻Rs為漏感儲能的釋放電阻;VD可以避免IGBT開通時電容的突然放電,以減小開通時的負擔。
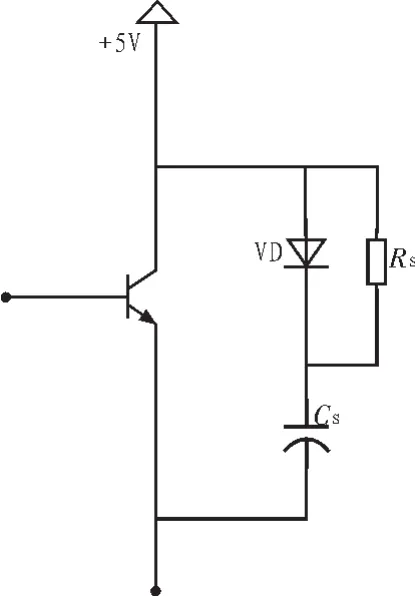
圖2 Snubber吸收緩沖電路Fig.2 Snubber absorption buffer circuit
1.4 電流與位置檢測電路設計
系統中的電流采樣環節通過霍爾電流傳感器實現,使用萊姆公司生產的LA58.P。系統中需要3個霍爾電流傳感器分別檢測三路相電流。位置信號的反饋電路設計將強電與DSP之間的電源進行隔離,本設計中應用TLPl81將強電與弱電電源進行隔離[4]。
過流保護電路:為了在故障時盡快切斷驅動信號,電路中設計了過流保護電路。該電路首先通過將三相電流信號線與然后進入比較器,比較值可以通過電位器進行調節。當有一相電流值大于所設的比較值后,比較器將產生一個過流信號。這個過流信號送到故障鎖存電路,最后通知DSP。
2 系統軟件設計
如圖3所示,系統采用TMS320F2812 DSP控制開關磁阻電機的軟件整體程序結構。
在程序的最高層上,包括初始化程序和主程序。初始化程序包括DSP設置、EVM初始化、控制算法參數初始化和開啟中斷服務程序。初始化結束后,主程序開始運行。主程序是一個無限循環程序,在主程序中主要進行轉速的計算和電流轉速等參數的發送[5]。
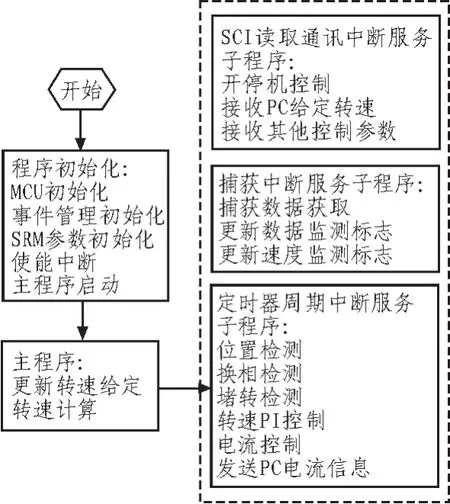
圖3 系統控制整體結構Fig.3 Overall structure of system control
電機控制過程中重要的相關時間量都是經過定時器中斷程序來完成的。采用定時器3周期中斷程序,定時器周期頻率為5 kHz。SRM在時間中斷程序運用的控制算法包括轉子位置計算、堵轉判斷、換相判斷、轉速PI控制、電流 PWM控制等。每一次定時器周期中斷啟動,首先進行一次轉子位置計算并完成一次堵轉判斷,即執行更新轉子位置和判斷堵轉的頻率都為5 kHz。而轉速PI控制、電流PWM控制和換相判斷,則以頻率5 kHz的五分頻運行,即每5次中斷這些控制控制各執行一次,其中換相判斷在第一次運行,速度PI控制于第三次執行,而電流PWM控制在第五次運行[3]。DSP3個捕獲單元CAPl23捕獲光電編碼器產生三路位置信號 (上升沿和者下降沿),每一次發生捕獲,程序就會進入捕獲中斷服務子程序中。在捕獲中斷服務子程序中,程序判斷哪一路發生了捕獲,讀取相應捕獲堆棧寄存器FIFO里的數據并儲存,等待位置和轉速的計算子程序調用參考。接下來中斷子程序更新位置標志位和轉速標志位,供其它子程序進行調用(轉速計算在主程序中實現,轉子位置計算在定時器周期中斷服務子程序中實現)。SCI接收中斷服務子程序主要負責接收上位機的指令。當收到上位機的指令,進入SCI接收中斷程序,根據接收的數據判斷是否開機,是否關機,是否為給定轉速。若為給定轉速,則繼續接收四位數據,即給定轉速的千、百、十、個四位數據[6]。
3 試驗結果分析
實驗系統結構框圖如圖4所示。
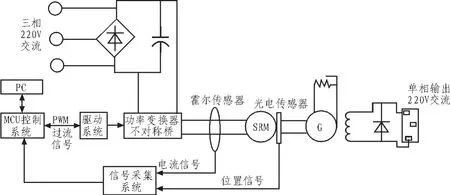
圖4 實驗系統結構框圖Fig.4 Experimental system structure diagram
針對不對稱功率電路控制系統的實驗包括給定轉速一定實驗,給定轉速變化實驗和負載改變實驗。當給定轉速為800 rpm時,電機啟動時,轉速很快達到給定轉速,并略有超調,然后基本達到穩定狀態。繞組電壓在導通時根據PWM通斷在母線電壓與0 V之間切換,當關斷時由于互感作用產生的感應電勢波動,繞組電流在導通時接近平頂波,峰值在4 A左右。電機啟動后在1.8 s左右達到給定轉速并基本穩定。由于轉速加快,每一相相對導通周期變短,在導通周期有些相繞組電流未達到最大值即導通結束,基本成為三角波,電流峰值在7 A左右。當給定轉速變化時,實際轉速值均能迅速達到新的給定值,具有較快的動態響應,但超調量比較明顯,但很快穩定。當電機在26 s加載后,實際轉速略有下降,電流峰值上升到15 A左右,在39 s后卸載,實際轉速又上升回到給定轉速附近。
4 結束語
開關磁阻電機調速系統作為一種新型的調速系統[7-8],同時具有直流調速系統和普通交流調速系統的優點,顯示出強大的市場競爭力,正逐步應用于家用電器、一般工業、伺服與調速系統、牽引電動機、高速電動機以及汽車輔助設備等領域,在工業、農業以及國防等領域的應用越來越廣泛。
[1]吳紅星.開關磁阻電機系統理論與控制技術[M].北京:中國電力出版社,2010.
[2]曲兵妮,宋建成.開關磁阻電動機互感特性及其對轉矩的影響[J].電機與控制學報,2009(3):19-23.QU Bing-ni,SONG Jian-cheng.Mutual inductance of switched reluctance motor and its effect on torque[J].Electric Machines and Control,2009(3):19-23.
[3]劉迪吉.開關磁阻電機發展及應用[J].電氣技術,2006(7):22-25.LIU Qi-di.Development and application of switched reluctance motor[J].Electrical Technology,2006(7):22-25.
[4]李廣海,葉勇,蔣靜坪.開關磁阻電機無位置傳感器技術的分析[J].微特電機,2004(7):1-3.LI Guang-hai,YE Yong,JIANG jing-ping.Analysis of indirect rotor-position detecting technique of switched reluctance motor[J].Micro motor,2004(7):1-3.
[5]任潤柏.TMS320F28x源碼解讀[M].北京:機械工業出版社,2010.
[6]薛梅.開關磁阻電機非線性建模方法及智能控制策略研究[D].天津:天津大學,2008.
[7]馬祥,高林.改進的電動鉆機柴油發電機組調速系統研究[J].現代電子技術,2012(6):186-188.MA Xiang,GAO Lin.Research on improved diesel generator governor of electric rig[J].Modern Electronics Technique,2012(6):186-188.
[8]陸華穎,程光偉,陳凱.模糊PID雙閉環直流電機調速系統仿真[J].電子科技,2012(8):56-58.LU Hua-ying,CHENG Guang-wei,CHEN Kai.Simulation of fuzzy PID brushless DC motor double-loop speed control system[J].Science and Technology,2012(8):56-58.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16