環(huán)形交叉口入口道車輛跟馳行為研究
2012-06-11 03:35:24金勇劉巖
大連交通大學學報 2012年1期
關鍵詞:模型
金勇,劉巖
(1.大連市城市規(guī)劃設計研究院 城市交通規(guī)劃研究所,遼寧 大連 116011;2.大連交通大學 交通運輸工程學院,遼寧 大連 116028;3.吉林大學 交通學院,吉林 長春 130022)
0 引言
環(huán)形交叉口具有很明顯的主支路特征,當環(huán)內車流與進環(huán)車流相交時,環(huán)內車流有先行權,只有當環(huán)內的車流出現(xiàn)較大間隙時,進環(huán)的車輛才能進人交叉口.這也就意味著在環(huán)形交叉口入口道進入環(huán)形交叉口的車輛必須判斷是否有足夠的間隙插入.當車輛密度很大時,入口道的車輛必須減速,判斷并等待“間隙”的出現(xiàn).當前車的減速或制動行為影響到后車的運動狀態(tài)時就發(fā)生了車輛跟馳現(xiàn)象.
環(huán)形交叉口是一種比較特殊的交叉形式,環(huán)形交叉口的設置形式、幾何線形、交通組織方式和行人干擾等,都較其它形式交叉口特殊,因此環(huán)形交叉口入口道的跟馳行為應該不同于普通道路上的跟馳行為.本文通過基本的跟馳模型來研究環(huán)形交叉口入口道的車輛跟馳現(xiàn)象,從而探討環(huán)形交叉口入口道車輛跟馳特點和運行狀況等.
1 環(huán)形交叉口入口道跟馳模型研究
1.1 模型分析
目前,國內外已經建立了許多跟馳模型,比如線性模型,刺激—反應模型,安全距離模型,生理—心理模型,模糊推理模型,元胞自動機模型等[1].其中,線性模型具有非常簡便和對穩(wěn)定性分析很敏感的優(yōu)點,并且能夠比較直觀地反映車輛跟馳的一些特性,所以文章采用線性跟馳模型.
線性模型公式為[2]:

式(1)是在前后車間速度相等,制動距離相等,在反應時間內車輛的速度不變的三個假設條件下推導出來的.其中將λ認為是與駕駛員動作相關的系數(shù),單位是1/s.該式表明后車的反應與前車的刺激成正比.
1.2 交通調查[3]
本文以大連市中山廣場上海路入口道交通流為例,來分析環(huán)形交叉口入口道車輛跟馳狀態(tài).利用攝像法進行調查,沿車道橫向貼上間距已知的標志線,并記錄跟馳狀態(tài)下前車(車1)和后車(車2)壓到標志線的時刻,如圖1所示.
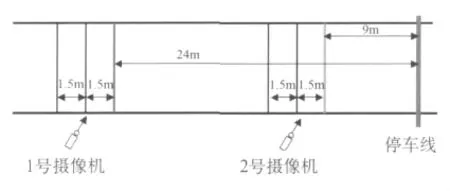
圖1 調查方案示意圖
研究車輛跟馳應該從車輛的基本運動狀態(tài)出發(fā),通過對車輛建立運動方程的方法來研究車輛的跟馳行為.因此,方案設計的目的也就是在于通過一系列的運動狀態(tài)來擬合出車輛跟馳時運動狀態(tài)的方程.本文以5 s作為判定跟馳行為的限界[4],在讀取數(shù)據(jù)時剔除掉車頭時距大于5 s的數(shù)據(jù),最終得到20組有效數(shù)據(jù).
調查采集到的數(shù)據(jù),首先得出散點圖,接著擬和出位移—時間關系式,最后利用位移-時間關系式就可以得出環(huán)形交叉口入口道車輛跟馳狀態(tài)模型,車輛時間—位移如圖2所示.
我并不想為呂布的行為辯解。單就史料上看,他的確為利所動,殺了丁原、董卓,沒什么好。只是,他真的比曹操、劉備等等,更惡嗎?去讀讀《三國演義》,滿目是狡詐、變節(jié)、陰謀、爭戰(zhàn)。所謂“老不看《三國》,少不讀《水滸》”,因為年紀大點,經些世故,就能覺出,劉備之仁厚近乎偽,關張則近乎僭。
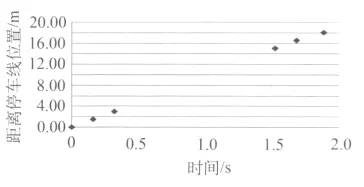
圖2 車輛運動狀態(tài)擬合圖
擬合方程如表1所示,由于篇幅所限盡列3組關系式.
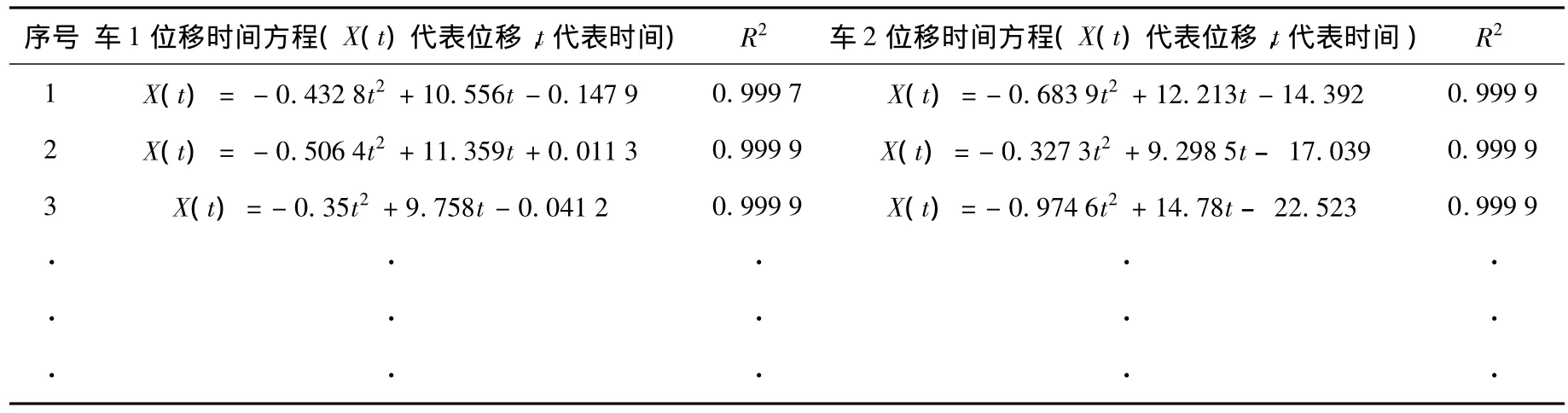
表1 車輛運動曲線擬合方程
2 參數(shù)標定
本節(jié)主要針對表1的擬合方程進行分析和處理.
根據(jù)運動學公式

式(2)對t求導,得到車輛的加速度與速度之間的關系方程.

對表1進行對t求導得到表2.
利用前車壓第一條線(即t=0時)的時刻來計算兩車的速度差,對表2中的式子對t進行求導得到后車的加速度,經過計算得到需要標定的λ的值,如表3所示.
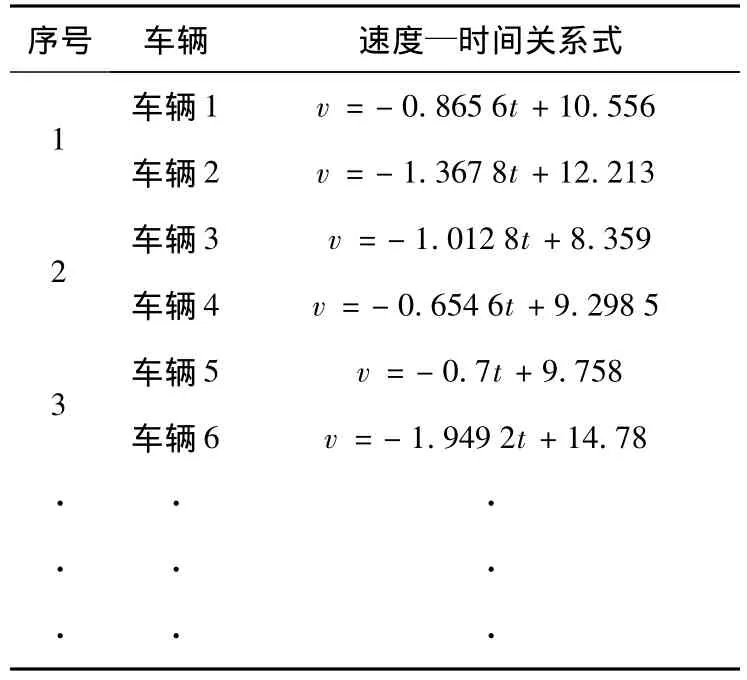
表2 車輛速度—時間關系式
表3 λ參數(shù)標定表(已經按n(t)-n+1(t)升序排序)
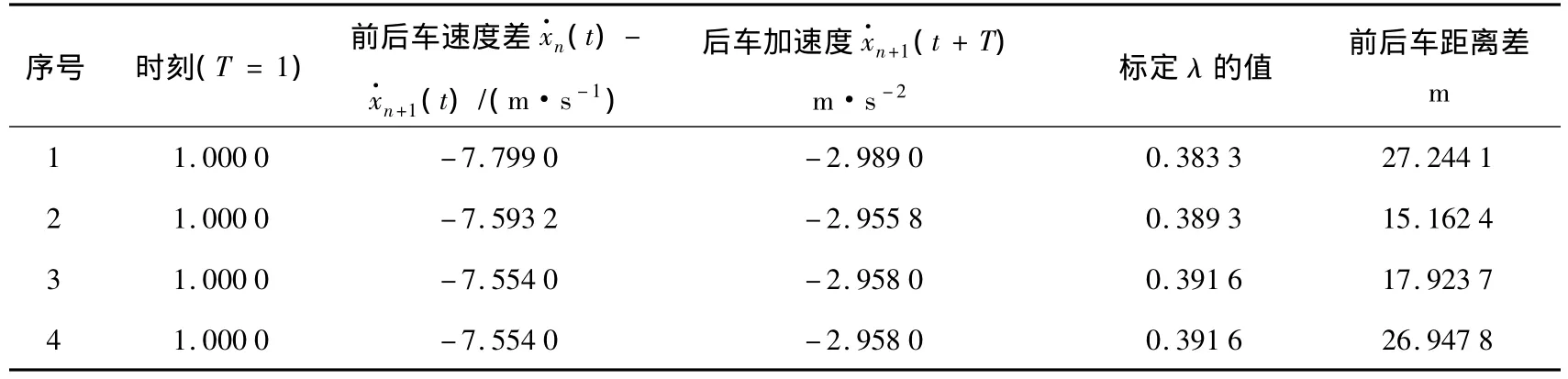
表3 λ參數(shù)標定表(已經按n(t)-n+1(t)升序排序)
序號時刻(T=1)前后車速度差x·n(t)-x·n+1(t)/(m·s-1)后車加速度x·n+1(t+T)m·s-2 標定λ的值 前后車距離差m 1 1.000 0 -7.799 0 -2.989 0 0.383 3 27.244 1 2 1.000 0 -7.593 2 -2.955 8 0.389 3 15.162 4 3 1.000 0 -7.554 0 -2.958 0 0.391 6 17.923 7 4 1.000 0 -7.554 0 -2.958 0 0.391 6 26.947 8
表3 λ參數(shù)標定表(已經按n(t)-n+1(t)升序排序)(續(xù)表)
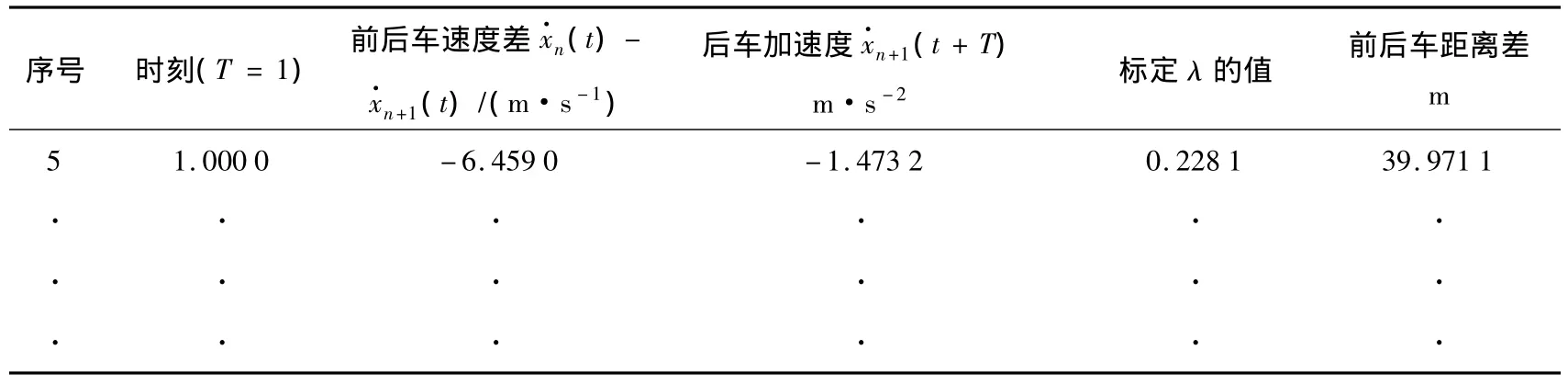
表3 λ參數(shù)標定表(已經按n(t)-n+1(t)升序排序)(續(xù)表)
序號時刻(T=1)前后車速度差x·n(t)-x·n+1(t)/(m·s-1)后車加速度x·n+1(t+T)m·s-2 標定λ的值 前后車距離差m 5 1.000 0 -6.459 0 -1.473 2 0.228 1 39.971 1··················
3 車輛跟馳行為分析
3.1 車輛跟馳行為分析
通過對表3中得到的數(shù)據(jù)進行處理分析得到λ的分布圖(圖3)和前后車速度差和后車加速度分布圖(圖4):
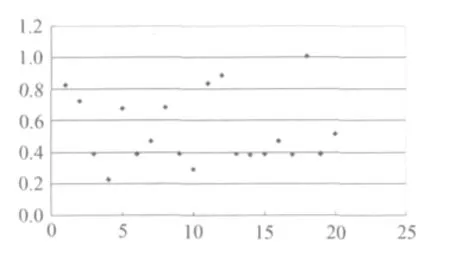
圖3 λ值分布圖
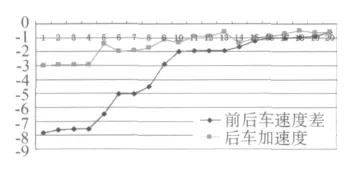
圖4 前后車速度差和后車加速度分布圖
(1)前后車速度差與后車的加速度有明顯的相同走向,說明前后車速度差與后車加速度之間存在線性關系;
(2)后車的減速度與兩車之間距離沒有明顯的關系;
(3)標定的參數(shù)λ的取值范圍在0.2~1 s之間,λ值分布在0.4附近的概率最大,根據(jù)20組試驗數(shù)據(jù)的統(tǒng)計分析,λ在數(shù)值0.39附近出現(xiàn)了8次,占了40%,因此推斷λ的值應該在0.39左右波動.
3.2 線形模型穩(wěn)定性的分析
在研究車輛跟馳時,車隊中車輛的穩(wěn)定性問題是很重要的.
所謂穩(wěn)定有兩層意思,一是指前后兩輛車的距離是否穩(wěn)定,例如車間距的擺動,若擺動大則不穩(wěn)定,擺動小則穩(wěn)定,這是局部穩(wěn)定性;另一種是前車向后面各車傳播速度的變化,如擴大其速度振幅則,則不穩(wěn)定,如果振幅衰減,則穩(wěn)定,稱為漸進穩(wěn)定性.
線形模型是一個復雜的二階微分方程,利用拉普拉斯變換求解該方程并得到如下關系式:

式中,C為表示車間距擺動特性數(shù)值,該值越大表示車間距擺動越大,該值越小表示車間距的擺動趨近于零;λ為值越大,表示反應過分強烈;T為反應時間,s.
(1)表4列出了各種C值時車間距的擺動情況.可以看出,隨C值的增加,車間距逐漸為不穩(wěn)定.這是因為對出現(xiàn)的時間,反應時間越長,反應太強烈,則在做出反應時,情況可能偏離實際的需要.
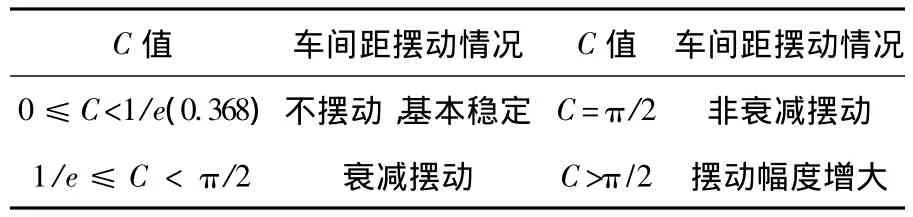
表4 線形跟馳模型車間距擺動情況(π=3.14)
由此可見C=1.57是線性模型中車頭間距從穩(wěn)定到非穩(wěn)定的臨界值.一般情況下,正常人的反應時間約為T=0.8 s,以及表3所標定的參數(shù)λ 中代入式(4),得到C 的值在0.182 48~0.806 27之間.根據(jù)表4判斷,在中山廣場環(huán)交入口道處車輛跟馳用線形模型分析時,車間距的擺動處于基本穩(wěn)定和衰減擺動兩種狀態(tài),這些表現(xiàn)是符合局部穩(wěn)定性的.
(2)漸進穩(wěn)定性.一列處于行駛狀態(tài)的車隊僅當C<0.5時,才是漸進穩(wěn)定的.與局部穩(wěn)定性相比較,這里C=0.5時,車頭間距的擺動衰減快.頭車運行中的擾動是以的速率沿車隊向后傳播.當C>0.5時,將以增大變動幅度傳播,增大了車間干擾,當干擾幅度增加到使車間距小于一個車長時,則發(fā)生追尾事故.
4 結論
綜上所述,可以看出車輛在環(huán)形交叉口入口道處表現(xiàn)出明顯的跟馳現(xiàn)象.利用線性跟馳模型對跟馳進行研究時,可以看出反應強度系數(shù)的值在0.2~1.0之間,環(huán)形交叉口入口道的跟馳行為特殊于普通道路上的跟馳行為.
通過對數(shù)據(jù)進行分析,發(fā)現(xiàn)車輛跟馳時,后車的減速度受車間速度差的影響比較明顯,但是受車間距的影響不明顯,這點符合線性模型的觀點.根據(jù)公式1計算出每個樣本點的λ值,這些值在一定的范圍內隨機出現(xiàn),其中λ值為0.38的值出現(xiàn)的概率比較大,占40%.
通過觀察可以得知,環(huán)形交叉口車流密集時,車輛之間保持一個最小的車頭時距t1,當車輛從入口道匯入環(huán)形交叉口時,前后跟馳車輛的車頭時距為t2,只有當環(huán)形車流車頭時距t>t1+t2時,車輛才能進入.因此,從入口道車流的情況可以看出環(huán)形交叉口的運行狀況.
[1]劉巖.車輛跟馳模型研究[D].大連:大連交通大學,2006.
[2]王殿海.交通流理論[M].北京:人民交通出版社,2002.
[3]劉巖,王殿海,韓萍.模擬彈簧車輛跟馳模型參數(shù)的標定[J].大連交通大學學報,2011,32(1):17-21.
[4]何民,榮建,任福田.判定跟馳狀態(tài)的研究[J].公路交通科技,2001,18(4):74-78.
[5]陳斌,魏朗.高速公路意外事件影響下的車輛跟馳模型[J].交通運輸工程學報,2006,6(3):103-108.
[6]周商吾.交通工程[M].上海:同濟大學出版社,1987.
[7]章三樂,肖秋生,任福田.車輛跟馳理論的實用研究[J].北京工業(yè)大學學報,1992,18(3):20-27.
[8]熊烈強,王富,李杰.考慮前后車速度關系的車輛跟馳模型[J].華中科技大學學報(自然科學版),2005,33(9):87-90.
[9]張智勇,榮建,任福田.跟車模型研究綜述[J].公路交通科技,2004,21(8):108-113.
[10]MARK BRACKSTONE,MIKE MCDONALD.Car-Following:A Historical Review[J].Transportation Research,1999,2F(4):36-47.
[11]GAZIS D C,HERMAN R,ROTHERS W.Nonlinear Follow-the-Leader Models of Traffic flow[J].Opns Res,1961,9:545-567.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
