銣原子頻標(biāo)遠(yuǎn)程在線校頻方案設(shè)計(jì)
2012-06-13 02:31:04劉陽琦潘紅芳趙景斐
電訊技術(shù) 2012年6期
杜 燕,劉陽琦,潘紅芳,趙景斐
(北京環(huán)球信息應(yīng)用開發(fā)中心,北京 100094)
銣原子頻標(biāo)遠(yuǎn)程在線校頻方案設(shè)計(jì)
杜 燕,劉陽琦,潘紅芳,趙景斐
(北京環(huán)球信息應(yīng)用開發(fā)中心,北京 100094)
依據(jù)銣頻標(biāo)檢定規(guī)程和衛(wèi)星導(dǎo)航定位系統(tǒng)地面監(jiān)測(cè)站技術(shù)指標(biāo)要求,設(shè)計(jì)了一套銣原子頻率標(biāo)準(zhǔn)在線校頻方案,解決了監(jiān)測(cè)站銣原子頻率標(biāo)準(zhǔn)每年到計(jì)量單位檢定的問題,從而確保各監(jiān)測(cè)站銣頻標(biāo)長(zhǎng)期正常工作。該方案對(duì)于銣原子頻率標(biāo)準(zhǔn)校頻具有通用性,可以推廣使用。
衛(wèi)星導(dǎo)航定位系統(tǒng);地面監(jiān)測(cè)站;銣原子頻率標(biāo)準(zhǔn);校頻;定時(shí)接收機(jī)
衛(wèi)星導(dǎo)航定位系統(tǒng)監(jiān)測(cè)站一般采用銣原子頻率標(biāo)準(zhǔn)(以下簡(jiǎn)稱銣頻標(biāo)),銣頻標(biāo)為監(jiān)測(cè)設(shè)備提供標(biāo)準(zhǔn)頻率信號(hào)。銣頻標(biāo)是一種被動(dòng)型原子頻標(biāo),系二級(jí)標(biāo)準(zhǔn)頻率源,需定期檢定[1]。傳統(tǒng)方法是將銣頻標(biāo)送到計(jì)量單位進(jìn)行檢定。一個(gè)導(dǎo)航定位系統(tǒng)有近百臺(tái)銣頻標(biāo),如果采用傳統(tǒng)方法,不僅周期長(zhǎng)、費(fèi)用高,而且影響系統(tǒng)的正常工作。本文依據(jù)銣頻標(biāo)檢定規(guī)程,充分利用衛(wèi)星導(dǎo)航系統(tǒng)的高精度授時(shí)功能[2-3],將主站的高精度頻率標(biāo)準(zhǔn)傳遞到監(jiān)測(cè)站,對(duì)銣頻標(biāo)進(jìn)行在線檢定,及時(shí)修正銣頻標(biāo)頻率偏差,保證監(jiān)測(cè)站的數(shù)據(jù)質(zhì)量。
1 系統(tǒng)要求
要實(shí)現(xiàn)對(duì)在線銣頻標(biāo)的頻率校準(zhǔn),首先應(yīng)對(duì)在線銣頻標(biāo)進(jìn)行精確測(cè)量。監(jiān)測(cè)站銣頻標(biāo)準(zhǔn)確度指標(biāo)要求為優(yōu)于5×10-11,要完成對(duì)其頻率校準(zhǔn),參考標(biāo)準(zhǔn)準(zhǔn)確度應(yīng)比被測(cè)銣頻標(biāo)高一個(gè)數(shù)量級(jí);為減少環(huán)境溫度對(duì)測(cè)量精度的影響,對(duì)測(cè)試環(huán)境也有一定要求。
1.1 測(cè)試環(huán)境要求
(1)溫度范圍:18℃~25℃范圍內(nèi)任一點(diǎn),測(cè)試過程中最大允許變化范圍±3℃。
(2)相對(duì)濕度:不大于80%。
(3)供電電源:電壓220±22 V,頻率50±1 Hz。
(4)負(fù)載:在測(cè)試過程中,負(fù)載應(yīng)固定不變。
1.2 測(cè)試設(shè)備要求
校準(zhǔn)所用儀器設(shè)備應(yīng)經(jīng)過計(jì)量技術(shù)機(jī)構(gòu)檢定(或校準(zhǔn)),滿足校準(zhǔn)使用要求,并在有效期內(nèi)。
(1)定時(shí)接收機(jī)要求:校頻頻率5 MHz、10 MHz,校頻準(zhǔn)確度1×10-12/day。
(2)時(shí)間間隔計(jì)數(shù)器要求:測(cè)量范圍10 Hz~100 MHz,有外接頻標(biāo)功能,有串口接口;測(cè)量準(zhǔn)確度±1 ns。
(3)計(jì)算機(jī)要求:CPU主頻2 GHz,內(nèi)存1G,硬盤160 G,兩個(gè)RS-232接口。
2 測(cè)試校準(zhǔn)方案
2.1 基本原理
采用接收比對(duì)方法,對(duì)銣頻標(biāo)準(zhǔn)確度進(jìn)行測(cè)量,根據(jù)測(cè)量結(jié)果對(duì)銣頻標(biāo)準(zhǔn)確度進(jìn)行校準(zhǔn)。定時(shí)接收機(jī)跟蹤鎖定相應(yīng)衛(wèi)星,接收時(shí)頻信息,輸出標(biāo)準(zhǔn)1 PPS秒信號(hào),作為參考標(biāo)準(zhǔn)。銣頻標(biāo)輸出1 PPS秒信號(hào),該信號(hào)為被測(cè)信號(hào)。時(shí)間間隔計(jì)數(shù)器測(cè)量被測(cè)信號(hào)與參考信號(hào)的時(shí)差值,利用時(shí)差在時(shí)間間隔內(nèi)的變化量,計(jì)算出被測(cè)銣頻標(biāo)的準(zhǔn)確度,根據(jù)對(duì)準(zhǔn)確度指標(biāo)要求,對(duì)銣頻標(biāo)進(jìn)行頻率調(diào)整。原理框圖如圖1所示。
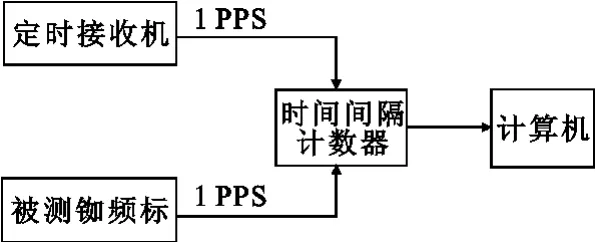
圖1 銣頻標(biāo)校頻設(shè)備連接圖Fig.1 Rb frequency calibration equipment connection diagram
2.2 軟件設(shè)計(jì)
該軟件為數(shù)據(jù)采集與處理軟件。采集被測(cè)銣頻標(biāo)與參考頻標(biāo)的時(shí)差比對(duì)數(shù)據(jù),完成數(shù)據(jù)的采集、預(yù)處理、發(fā)送及工況監(jiān)視等任務(wù),并實(shí)時(shí)計(jì)算被測(cè)頻標(biāo)的各項(xiàng)性能指標(biāo),將計(jì)算結(jié)果存儲(chǔ)至本地?cái)?shù)據(jù)庫。
該軟件具備如下功能:
(1)實(shí)時(shí)采集被測(cè)頻標(biāo)與參考頻標(biāo)的時(shí)差比對(duì)數(shù)據(jù);
(2)對(duì)時(shí)差數(shù)據(jù)的采集頻度能夠進(jìn)行靈活控制;
(3)對(duì)原始測(cè)量數(shù)據(jù)進(jìn)行粗差剔除、擬合等處理;
(4)實(shí)時(shí)計(jì)算顯示被測(cè)銣頻標(biāo)的頻率準(zhǔn)確度;
(5)計(jì)算結(jié)果存儲(chǔ)到本地?cái)?shù)據(jù)庫中,并提供事后查詢功能;
(6)計(jì)算結(jié)果以WORD格式文件輸出,并提供報(bào)表打印功能;
(7)實(shí)時(shí)監(jiān)測(cè)測(cè)量設(shè)備的工作狀態(tài),對(duì)工作異常進(jìn)行識(shí)別和報(bào)警。
2.2.1 設(shè)計(jì)說明
數(shù)據(jù)采集與處理軟件模塊結(jié)構(gòu)如圖2所示。
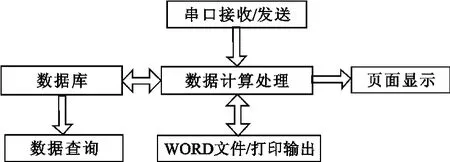
圖2 數(shù)據(jù)采集與處理軟件模塊結(jié)構(gòu)圖Fig.2 Structure of data collection and processing software module
串口數(shù)據(jù)接收與發(fā)送主要完成從RS-232接口接收測(cè)量時(shí)差數(shù)據(jù)包,并發(fā)送至數(shù)據(jù)預(yù)處理模塊進(jìn)行解析;從數(shù)據(jù)預(yù)處理模塊接收采集頻度控制指令,并通過RS-232接口完成數(shù)據(jù)的寫入。
數(shù)據(jù)計(jì)算處理是軟件的主體部分,根據(jù)鐘差測(cè)量結(jié)果,計(jì)算被測(cè)鐘的頻率準(zhǔn)確度,準(zhǔn)確度計(jì)算公式如下:
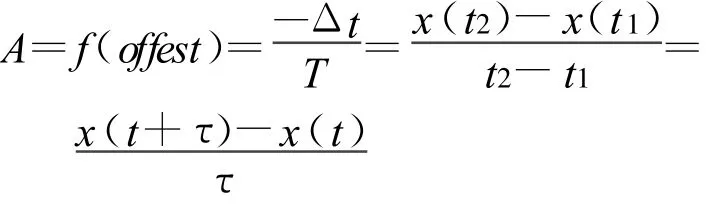
式中,x(t)為被測(cè)銣頻標(biāo)與參考頻標(biāo)的時(shí)差測(cè)量數(shù)據(jù)。
軟件執(zhí)行流程如圖3所示。
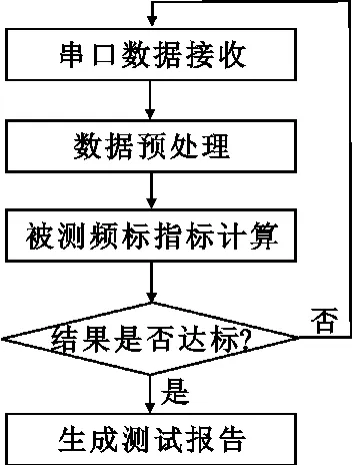
圖3 數(shù)據(jù)采集與處理軟件執(zhí)行流程Fig.3 Processing flowchart of data collection and processing software
2.2.2 運(yùn)行環(huán)境
數(shù)據(jù)采集與處理軟件運(yùn)行在數(shù)據(jù)處理計(jì)算機(jī)上,存在形式是“.exe”應(yīng)用程序,計(jì)算機(jī)要求為有串行接口。操作系統(tǒng)為Windows XP,開發(fā)軟件為Visual C++6.0,數(shù)據(jù)庫Micsoft Access 2007。
2.3 校頻操作步驟
2.3.1 測(cè)試步驟
將在線工作銣鐘輸出信號(hào)按連接圖接入測(cè)試系統(tǒng)。對(duì)需加電開機(jī)的銣鐘應(yīng)加電預(yù)熱一天進(jìn)行測(cè)試。
將定時(shí)接收機(jī)(“北斗”定時(shí)接收機(jī)/GPS定時(shí)接收機(jī))加電,按照定時(shí)接收機(jī)說明書的要求完成定時(shí)接收機(jī)設(shè)置,跟蹤鎖定相應(yīng)衛(wèi)星。接收機(jī)處于位置保持狀態(tài),輸出有效的參考時(shí)間。
設(shè)置時(shí)間間隔計(jì)數(shù)器。將計(jì)數(shù)器A、B通道負(fù)載設(shè)置為50 Ψ,直流耦合,觸發(fā)電平設(shè)置為0.7 V。
將采集處理計(jì)算機(jī)串口連接時(shí)間間隔計(jì)數(shù)器,并啟動(dòng)數(shù)據(jù)采集處理軟件。
按圖1連接設(shè)備,被測(cè)銣頻標(biāo)輸出1 PPS信號(hào)作為時(shí)間間隔計(jì)數(shù)器開門信號(hào),定時(shí)接收機(jī)輸出的1 PPS信號(hào)作為時(shí)間間隔計(jì)數(shù)器關(guān)門信號(hào)。每秒測(cè)試一次,測(cè)出兩個(gè)1 PPS信號(hào)的時(shí)差。
采集處理計(jì)算機(jī)采集時(shí)間間隔計(jì)數(shù)器數(shù)據(jù),并實(shí)時(shí)計(jì)算出銣頻標(biāo)準(zhǔn)確度,測(cè)試完成后,生成測(cè)試報(bào)告。
2.3.2 校準(zhǔn)步驟
當(dāng)被測(cè)銣頻標(biāo)準(zhǔn)確度低于技術(shù)指標(biāo)要求時(shí),應(yīng)對(duì)其進(jìn)行校頻。測(cè)量時(shí)觀察計(jì)數(shù)器時(shí)差值,每次調(diào)頻幅度不可太大,調(diào)整過程中可以參考1 h準(zhǔn)確度進(jìn)行微調(diào),記錄調(diào)整過程,調(diào)到準(zhǔn)確度指標(biāo)要求后,穩(wěn)定運(yùn)行一天,再次測(cè)試銣頻標(biāo)準(zhǔn)確度,滿足要求后,記錄銣頻標(biāo)校頻結(jié)果。
銣頻標(biāo)校頻流程如圖4所示。
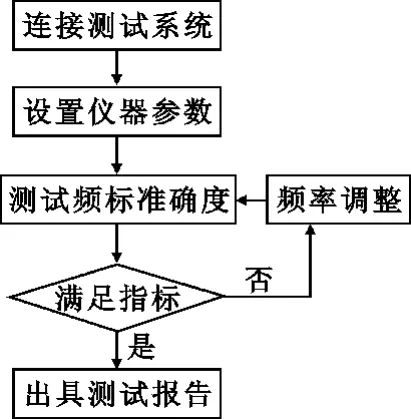
圖4 銣頻標(biāo)校頻流程圖Fig.4 Rb frequency calibration flowchart
3 校準(zhǔn)結(jié)果的處理和復(fù)校時(shí)間間隔
測(cè)試或調(diào)整后的頻率準(zhǔn)確度滿足技術(shù)指標(biāo)要求,記錄下本次校頻結(jié)果,出具測(cè)試報(bào)告。
依據(jù)銣頻標(biāo)檢定規(guī)程,頻率準(zhǔn)確度復(fù)校時(shí)間定為1年。
4 結(jié)束語
利用衛(wèi)星導(dǎo)航定位系統(tǒng)自身的授時(shí)功能進(jìn)行遠(yuǎn)程在線銣頻標(biāo)校頻,具有校頻精度高、設(shè)備量少、效率高、節(jié)約經(jīng)費(fèi)的優(yōu)點(diǎn),經(jīng)過實(shí)際使用,滿足導(dǎo)航系統(tǒng)監(jiān)測(cè)站對(duì)銣頻標(biāo)的精度要求。下一步監(jiān)測(cè)站裝備升級(jí)時(shí),可與該校準(zhǔn)系統(tǒng)一體化設(shè)計(jì),實(shí)現(xiàn)自動(dòng)化校準(zhǔn),效能將得到更好的發(fā)揮。
該方法對(duì)于銣原子頻率標(biāo)準(zhǔn)校頻具有通用性,可以推廣使用。
[1]JJG 292-1996,銣原子頻率標(biāo)準(zhǔn)檢定規(guī)程[S].JJG 292-1996,Rb Atomic Frequency Standards Verification Regulation[S].(in Chinese)
[2]郭信平.衛(wèi)星導(dǎo)航系統(tǒng)應(yīng)用大全[M].北京:電子工業(yè)出版社,2011.
GUO Xin-ping.FullApplication of SatellitesNavigation System[M].Beijing:Publishing House of Electronics Industry,2011.(in Chinese)
[3]譚述森.衛(wèi)星導(dǎo)航定位工程[M].北京:國(guó)防工業(yè)出版社,2007.
TAN Shu-sen.Engineering of satellites Navigation-positioning System[M].Beijing:National Defense Industry Press,2007.(in Chinese)
DU Yan was born in Shangqiu,Henan Province,in 1964.She is now a senior engineer.Her research concerns satellite navigation and time frequency.
Email:luckyzhaowenjun@163.com
劉陽琦(1979— ),男,江西九江人,工程師,主要研究方向?yàn)樾l(wèi)星導(dǎo)航和時(shí)間頻率技術(shù);
LIU Yang-qi was born in Jiujiang,Jiangxi Province,in 1979.He isnow anengineer.His research concerns satellite navigation and time frequency.
潘紅芳(1982— ),女,山東諸城人,助理工程師,主要研究方向?yàn)樾l(wèi)星導(dǎo)航和時(shí)間頻率技術(shù);
PAN Hong-fang was born inZhucheng,Shandong Province,in 1982.She is now an assistent engineer.Her research concerns satellite navigation and time frequency.
趙景斐(1979—),男,黑龍江哈爾濱人,工程師,主要研究方向?yàn)樾l(wèi)星導(dǎo)航和時(shí)間頻率技術(shù)。
ZHAO Jing-fei was born in Harbin,Heilongjiang Province,in 1979.He is now an engineer.Hisresearch concerns satellite navigation and time frequency.
Design of Remote Online Frequency Calibration for Rb Frequency Standards
DU Yan,LIU Yang-qi,PAN Hong-fang,ZHAO Jing-fei
(Beijing Global Information Center of Application and Exploitation,Beijing 100094,China)
According to the Rb frequency standard verification regulations and technical specification requirements for satellite navigation and positioning system ground stations,a set of solution to Rb atomic frequency standards online frequency calibration is designed and described in this paper.The set of solution can solve the problem of going to metrology branches to monitor Rb atomic frequency standard every year and ensure that Rb frequency standard can work normally long-term in all the monitoring stations.The solution can be widely applied in Rb frequency calibration.
satellite navigation and positioning system;ground monitoring station;Rb atomic frequency standards;frequency calibration;timing receiver
TN965;TM935
A
10.3969/j.issn.1001-893x.2012.06.046
1001-893X(2012)06-1051-03
2012-05-09;
2012-06-08
杜 燕(1964—),女,河南商丘人,高級(jí)工程師,主要研究方向?yàn)樾l(wèi)星導(dǎo)航和時(shí)間頻率技術(shù);