基于S3C2410和WinCE的光伏發電跟蹤控制系統
2012-06-19 09:10:40曹煜國
微特電機 2012年7期
向 平,袁 博,曹煜國
(西北工業大學,陜西西安710072)
0 引 言
為提高光伏發電系統的發電量,需要提高光伏陣列吸收太陽輻射能量的能力。通常工程中采用的方法是為光伏陣列安裝跟蹤裝置,而雙軸跟蹤方式是目前國內外比較流行的太陽跟蹤系統裝置。因此,本文從現有的研究基礎上,將設計采用視日軌跡跟蹤和雙軸跟蹤的方法,以ARM為控制核心,步進電動機為執行元件,通過對跟蹤裝置的水平和俯仰兩個方向的控制,實現對太陽的全天候跟蹤。該跟蹤控制系統不僅對于大型光伏發電具有現實的意義,并能對改善和推廣利用太陽能起到積極的推動作用。
1 S3C2410簡介
S3C2410的CPU內核采用的是ARM公司設計的16/32位ARM920T RISC處理器。ARM920T實現了MMU(內存管理單元)、AMBA(先進的微控制器總線體系結構)總線和Harvard高速緩存體系結構,該結構具有獨立的16 kB指令Cache和16 kB數據Cache,每個Cache都是由8個字長的行組成的。此外,S3C2410還集成了豐富的片上資源,開發者可以盡可能地減少外圍設備部件,從而大大減少了整個系統的成本,減少了開發周期。
2 系統的硬件構成
2.1 系統的構成原理圖
系統的構成原理框圖如圖1所示。根據天文太陽軌跡計算方法,微控制器MCU計算出太陽的高度角和方位角,轉換成步進電動機轉過相應角度所需的步數,通過I/O口進行脈沖和方向信號的發送至步進電動機的驅動器,驅動器進行一定的功率放大,驅動跟蹤裝置轉動,使光伏板時刻保持與太陽的光線垂直,完成實時跟蹤太陽的功能。
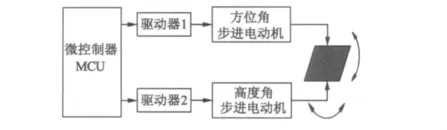
圖1 系統構成原理圖
2.2 系統硬件
系統的硬件設計方框圖如圖2所示。
(1)工作電壓及復位電路
系統的工作電壓有 1.8 V/2.0 V、5V 與 3.3 V三種。系統內核供電1.8 V/2.0 V,1.8 V 內核供時,最高工作頻率為200 MHz,本系統采用2.0 V內核供電,最高工作頻率可達266 MHz。獨立直流5V電源供USB接口、LCD等使用。存儲器和I/O口所需電壓為3.3 V,可由5 V電源經過降壓獲得。

圖2 系統硬件設計方框圖
系統復位采用專門的復位芯片MAX708構成復位電路,且帶有手動復位的引腳,穩定可靠。
(2)存儲模塊
系統采用了3種存儲器,即:NOR Flash、NAND Flash和SDRAM。NOR Flash存儲器具有速度快,數據不易丟失等特點,因此用于存放引導程序、操作系統和用戶程序。NAND Flash價格低廉、數據不易丟失,考慮到用戶不可對其直接操作的特點,將其作為文件存儲器,用于存放系統運行時所使用的程序代碼、堆棧和數據,以提高系統的運行速度。SDRAM為系統內存,主要用于執行主程序。
(3)人機交互模塊
液晶顯示器(LCD)、觸摸屏、矩陣鍵盤構成了系統的人機交互模塊,液晶顯示和觸摸屏部分用于顯示系統的狀態信息,鍵盤用于進行手動校正或系統的復位。S3C2410集成了256K色的TFT LCD(薄膜場效應晶體管)控制器,系統采用分辨率為320*240,3.5英寸TFT液晶屏,帶有觸摸屏功能。鍵盤選用4*5矩陣小鍵盤與控制器的I/O口相連。
(4)通用I/O口
S3C2410具有24通道外部中斷源和117個通用輸入輸出口(GPIO)引腳,分為8組,即 PORTA(GPA)~PORTH(GPH)。8組I/O口按照其位數不同,可分為:1個23位輸出口(PORTA),2個11位I/O口(PORTB和 PORTH)),4個16位 I/O口(PORTC、PORTD、PORTE、PORTG),1 個8位 I/O 口(PORTF)。為滿足不同系統設計的需要,可以很容易地通過軟件對這些I/O口進行配置。本系統選用端口PORTF(GPF),包括管腳GPF0~GPF7,由于只需四個端口即可完成系統的功能,因此選用GPF0~GPF3作為控制信號。
(5)其它
本系統選用了一個USB1.1 HOST接口和一個USB1.1 Device接口,USBDevice口與PC機相連,可與PC機進行通信。在燒寫Flash的時候,可通過USB下載,速度要比串口快得多。應注意的是在采用USB下載時,需保證USB連接好,如不能下載需將USB重新插拔。
2.3 步進電機驅動電路設計
本系統選用的步進電機為兩相四線型的永磁感應式,其型號為 130BYG系列,配套驅動器為SH20822M,工作電壓為市電220 V,其連接采用共陰極接法(CP接 CP+,DIR接 DIR+,FREE接FREE+,共陰端分別接 CP-、DIR -、FREE-),如圖3所示。步進電機單步走角為1.8°。
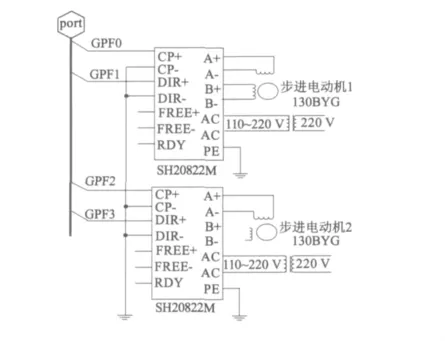
圖3 步進電動機與驅動器連接
通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。方向電平信號DIR由端口GPF1和GPF3來控制步進電動機的旋轉方向;脈沖個數CP由端口GPF0和GPF2給出;脫機電平信號FREE,本系統不需要此信號功能,所以此端不接,懸空。此外,由于S3C2410的I/O輸出高電平為3.3 V,而SH20822M驅動電壓為5 V,兩者電平無法兼容,因此設計了3.3 V轉5 V電平轉換電路,保證控制器驅動電機正常工作。其實現電路如圖4所示。
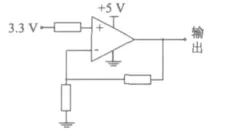
圖4 電平轉化電路
3 系統的軟件構成
基于WinCE 6.0的嵌入式系統采用4層體系結構,具有層次性強、可移植性好、組件可裁剪、強調編程接口和支持上層應用等特點。光伏發電跟蹤控制系統從下而上可分為4層:硬件平臺、驅動程序、WinCE 6.0操作系統和應用程序。具體系統架構如圖5所示。軟件部分主要分為操作系統內核的定制、應用程序的開發。
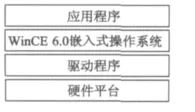
圖5 系統架構
WinCE 6.0是微軟開發的、可升級的32位嵌入式操作系統,具有模塊化、結構化和基于Win32應用程序接口以及與處理器無關等特點。Visual Studio2005專業版作為WinCE 6.0的一部分一并被推出,而Visual Studio 2005專業版包括一個被稱為Platform Builder的功能強大的插件,可作為嵌入式平臺的“集成開發環境(IDE)”。本文就是選用WinCE 6.0+VS2005為開發環境,兩者的結合可滿足控制跟蹤系統的實時性、穩定性的要求。
3.1 WinCE 6.0 內核的定制與移植
本系統所需的操作系統是通過對WinCE 6.0系統結構進行配置與裁剪后安裝運行在ARM9硬件平臺上的,其定制與移植過程大致簡述如下。
首先,確保PC機上已安裝好WinCE 6.0開發環境,利用其生成的開發工具Platform Builder進行操作系統IDE的定制,且附帶有基于WinCE 6.0平臺的所有創建、設計、編譯、測試和調試等一體的其它開發工具。
其次,創建板級支持包(BSP)即OAL層、Boot Loader和驅動程序的開發。再者,下載官方的EBOOT(在開發的過程中使用EBOOT,可以提高開發效率),加載 BOOTLOADER的 Startup函數,EBOOT依次調用函數 OEMDebugInit()、OEMPlatformInit()、OEMPreDownload()、OEMLaunch()完成內核的初始化工作。最后,加載系統所需的驅動程序,如系統終端和系統時鐘驅動、實時時鐘驅動、USB驅動、液晶(LCD)驅動和觸摸屏驅動等。
WinCE 6.0內核的定制與移植以及相應驅動程序詳細過程這里不再贅述,應用程序的開發是在Platform Builder導出的軟件開發工具包(SDK)上進行的,采用C/C++語言編寫。
3.2 應用程序開發
系統應用軟件方框圖如圖6所示。包括系統初始化模塊、高度角和方位角計算模塊、步進電動機驅動模塊以及人機界面模塊等。采用面向對象方法,按照模塊化結構進行系統應用程序的設計與開發。

圖6 應用軟件方框圖
(1)系統初始化模塊
該模塊的主要作用是確定機械裝置的基準位置以及控制機械裝置的行程和限位保護。將精密限位開關安裝在系統高度角和方位角方向的零點位置,當機械運動到基準位置的時候,通過觸發開關向控制器端口發送切斷信號,控制器接收到信號后,立即終止脈沖信號的發送。這種模式主要是針對系統工作異常和復位自動返回基準零點位置而設置的,此外,也可以同時減小因機械結構加工和步進電動機傳動所產生的誤差累計。
(2)高度角和方位角計算模塊
該模塊根據太陽運行軌跡的算法,由當地的地理位置和標準時間來確定太陽每時每刻的位置,且由相應的公式可得出。在實際應用中,手動輸入當地地理緯度,當地時間則由高精度控制器的時鐘模塊來提供,以保證系統的準確定位和跟蹤。
(3)步進電機驅動模塊
步進電機是一種用電脈沖信號進行控制,并將電脈沖信號轉換成相應角位移的控制元件。驅動模塊是控制器與步進電動機的接口,三者共同作用實現雙軸的轉向、轉角和轉速的控制。對于本系統的驅動器而言,轉向取決于控制器送出的方向電平的高或低,轉角取決于控制器送出的步進脈沖的個數,而轉速則取決于控制器發出的步進脈沖之間的時間間隔。
本系統的主程序完成實時太陽高度角和方位角的計算,并對高度角和方位角按照每累計1.8°發出一次脈沖信號,這樣既可以滿足步進電動機參數,又不會累計誤差。并且對于水平方向進行20細分,俯仰方向進行10細分,使步進電動機的控制精度進一步提高,又能降低電機低頻振蕩。控制器端口按照步進電動機穩定工作的脈沖頻率200 Hz發出脈沖信號,同時發送方向電平來控制跟蹤裝置的運動方向,送至SH2088M驅動步進電動機按照控制策略運動。其控制程序主流程圖如圖7所示。
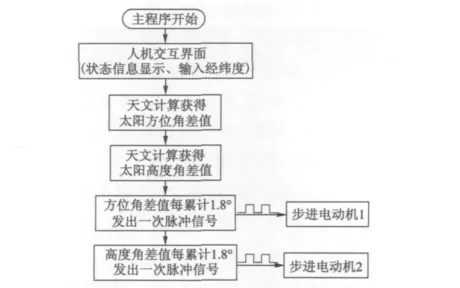
圖7 控制程序主流程圖
(4)人機交互界面
系統的人機交互界面是在WinCE 6.0提供的圖形界面服務下開發的,由圖形化窗口與事件子系統(GWES.EXE)實現。可在此界面通過設置相應的參數進行手動校正和異常復位,還可以顯示太陽的高度角和方位角及時間等狀態信息。其顯示界面如圖8所示。
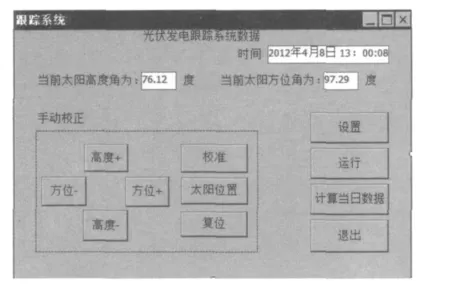
圖8 系統顯示界面
4 結 語
本文以S3C2410與WinCE 6.0為硬軟件平臺,以步進電動機為執行元件,完成了光伏發電跟蹤控制系統的整體功能設計,整個系統能滿足系統微型化、高性能和實時性的要求,而且還可以對光伏發電系統其它功能進行擴展,具有很好的推廣性。
[1]Stine W B,Harrigan R W.Solar energy fundamentals and design[M].New York:John Wiley,1985.
[2]饒鵬.兩緯程控太陽跟蹤器控制系統的研制[J].控制工程,2004,11(6):542 -545.
[3]竇偉.跟蹤式光伏發電系統研究 [J].太陽能學報,2007,28(2):169-173.
[4]尤金正.太陽自動跟蹤系統的設計[J].現代電子技術,2009(19):139-142.
[5]Cucumo M,Kaliakatsos D,Marinelli V.General calculation methods for solar trajectories[J].Renewable Energy,1997,30(3):223-234.
[6]何宗建.Windows CE嵌入式系統[M].北京:北京航空航天大學出版社,2006.
[7]周立功.ARM & WinCE實驗與實踐 - 基于 S3C2410[M].北京:北京航空航天大學出版社,2007.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25