一種隱式廣義預測自校正控制算法及其仿真研究
2012-06-20 03:18:16符曉玲
電氣傳動自動化 2012年1期
關鍵詞:系統
符曉玲
(昌吉學院物理系,新疆昌吉831100)
1 引言
在眾多的預測控制算法中,近年來研究最活躍的,同時成果也最多的是D.W.Clarke等人于1987年提出的廣義預測控制(Generalized Predictive Control,GPC)算法[1-3]。廣義預測控制作為一種新型的遠程預測控制方法,集多種算法的優點于一體,具有較好的性能。現有多種修正算法,大體上可分為顯式算法和隱式算法兩種。顯示算法是先辨識對象模型參數,然后利用Diophantine方程作中間運算,最后得到控制律參數,由于要作多步預測,就必須多次求解Diophantine方程,因要經過繁瑣的中間運算,故計算工作量較大,占線時間較長。隱式算法不辨識對象模型參數,而是根據輸入/輸出數據直接辨識求取最優控制律中的參數,因而避免了在線求解Diophantine方程所帶來的大量中間運算,減少了計算工作量,節省了時間[4-6]。
為了驗證隱式算法的可行性和優越性,本文將對其算法進行介紹,并進行仿真研究,分析仿真結果,總結參數變化對整個系統性能的影響。
2 單輸入單輸出系統的隱式廣義預測自校正控制算法
2.1 并列預測器
GPC的最優化控制律

要求ΔU必須知矩陣G和開環預測向量f,原因是控制量加權因子λ和經柔化后的設定值向量W均屬已知量。隱式自校正方法就是利用輸入/輸出數據,根據預測方程直接辨識G和f。
以前根據預測理論,為了預測超前輸出,引入Diophantine方程得到的最優輸出預測值為:

根據式(2)可得n個并列預測器為:

分析式(3)可知,矩陣 G 中所有元素 g0,g1,…,gn-1都在最后一個方程中出現,因此僅對式(3)的最后一個方程辨識,即可求得矩陣G。
2.2 矩陣的求取
在式(3)的最后一個方程中,令

則式(3)的最后一個方程可寫為:

輸出預測值為 y(k+n/k)=X(k)θ(k)或
本課中,按照學生的認知規律,教師把對食物網的探究進行梯度設計,首先請學生閱讀《有趣的“貓和牛”》,學習達爾文研究食物網的方法和角度。學生發現數量變化后,也領悟到了尋找生物間的關系是蘊含在其中的方法。教師再請學生結合一日三餐,思考:人是否屬于食物鏈(網)中的一員?我們從食物中獲得了什么?能量主要儲存在哪里?引導學生從數量、物質、能量三個角度進行探究。為了提升探究的有效性,教師進一步組織如下活動:

若在時刻 k,X(k-n)元素已知,Enξ(k+n)為白噪聲,就能用普通最小二乘法估計參數向量θ(k),然而通常Enξ(k+n)不是白噪聲,因此采用將控制策略與參數估計相結合的方法,即用輔助輸出預測的估計值來代替輸出預測值 y(k/k-n),且認為與實際值 y(k)之差為白噪聲 ε(k)。

θ(k)可用以下遞推最小二乘公式估計為:

式中:λ1為遺忘因子,0<λ1<1。
k時刻n步估計值可由下式算出,即

2.3 預測向量f的求取
根據GPC與動態矩陣控制(DMC)控制規律的等價性,GPC中的f向量相當于DMC中的Y0向量,可得到下一時刻的預測向量f為

在G和f求得后,就可利用式(1)計算控制量,在計算的每一步,都能得到此步至以后n步各點上的n個控制序列。為及時利用反饋信息決定控制量,每次僅將序列中的第一個控制量作用于系統,其后的n-1個控制量不直接作用于系統,而只用于^的計算。
2.4 控制律的簡化
在自校正方案中,可從式(1)看出,每次計算必須在線求解一次 n×n 維逆陣(GTG+λI)-1,在這里與基本的GPC一樣,也引入控制時域長度,m(m≤n)當 j>m 時,有 Δu(k+j-i)=0,從而矩陣 G 變成 n×m維,矩陣(GTG+λI)則變成了 m×m 方陣,降低了維數,減少了計算工作量。對階數較低較易控制的簡單系統,可取 m=1,這時(GTG+λI)將由矩陣變成一個標量數值,而整個運算過程將不會有矩陣運算。
2.5 GPC控制算法中的主要參數
對GPC來說,影響其性能的主要參數主要有以下幾個。
(1)采樣周期T
采樣周期T直接影響到g0,g1,…,gn-1和gT矩陣。采樣周期T的選擇,原則上應使采樣頻率滿足香農定理的要求,即應大于2倍截止頻率。T大有利于控制穩定,但不利于抑制擾動。T太長,將會丟失一些有用的高頻信息,無法重構出連續時間信號,且使模型不準,控制質量下降;T也不能太短,否則機器計算不過來,且有可能出現離散非最小相位零點,影響閉環系統的穩定。
(2)預測長度n
預測長度n對系統的穩定性有重要的影響。若控制長度m很小,控制加權系數λ=0,即在控制增量不受壓制的情況下,增大n總可以得到穩定控制;若m為任意,通過加大λ,當∑gi>0時,可得到穩定控制。
n對系統的動態特性也有影響。當n較小時,系統動態性能較差,增加n,可明顯改善動態性能,增強系統的魯棒性。但n過大,對進一步改善系統的動態性能作用不大,反而會增加計算時間,一般取 n=5-15。
(3)控制長度m
控制長度m對系統的性能影響較大。較小的m,對控制起到一定的約束作用,使輸出變化平緩,有利于控制系統穩定;而偏大的m,表示有較多步的控制增量變化,增大了系統的靈活性和快速性,但往往產生振蕩和超調,引起系統的不穩定。因此,m的選擇應兼顧快速性與穩定性,一般取m=1-3。
(4)控制加權系數λ
增加λ,控制量減少,輸出響應速度減慢,有益于增強系統的穩定性;但過大的λ會使控制量的變化極為緩慢,系統得不到及時的調節,反而會使動態特性變壞,一般取 0<λ<1。λ=0 時,對控制量無約束。
(5)柔化系數α
柔化系數α對系統的魯棒性有重要的影響。若α小,跟蹤的快速性好,魯棒性差;增加α,系統的快速性變差,而魯棒性提高,故α的選擇必須在動態品質與魯棒性之間折中考慮,一般取0<α<1。
3 單輸入單輸出系統的仿真研究
為驗證該控制策略的有效性,對非最小相位系統進行仿真。考慮系統模型為:

將這個非最小相位系統與非線性環節構成非線性控制系統,如圖1所示。
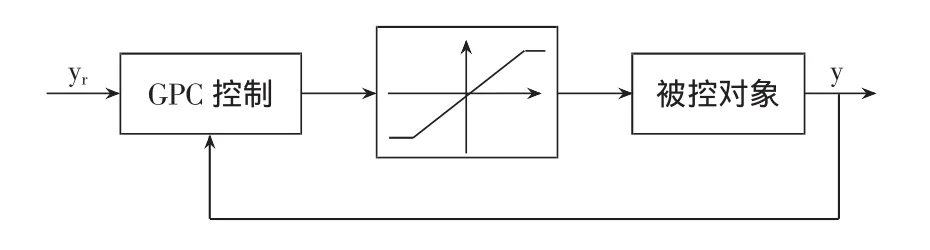
圖1 具有非線性特性的非最小相位控制系統
取參數:p=n=6,m=2,λ=0.8,α=0.3,λ1=1;RLS參數初值:gn-1=1,f(k+n)=1,Po=105I,其余為零;ξ(k)為[-0.2,0.2]均勻分布的白噪聲,可得如圖 2 所示特性曲線。

圖2 跟蹤給定值特性曲線(m=2,λ=0.8,α=0.3)
為了比較參數變化對系統特性的影響,再取一組參數:p=n=6,m=2,λ=0.6,α=0.3,λ1=1;RLS 參數初值:gn-1=1,f(k+n)=1,Po=105I,其余為零;ξ(k)為[-0.2,0.2]均勻分布的白噪聲,可得如圖 3 所示特性曲線。
由圖2和圖3可以看出,按照前面的方法來選擇參數,系統能夠較好的工作。而λ的引入是為了抑制過于劇烈的控制增量,以防止系統發生劇烈振蕩。比較圖2和圖3,當λ從0.6變為0.8時,控制量減少,輸出響應速度減慢,但穩定性增強了。因此,增加λ,輸出響應速度減慢,有益于增強系統的穩定性。

圖3 跟蹤給定值特性曲線(m=2,λ=0.6,α=0.3)
4 結束語
本文通過對廣義預測控制進行改進,介紹了隱式廣義預測自校正控制算法,并進行了仿真研究。通過仿真結果驗證了該算法的優越性和可行性,并分析了參數變化對整個系統性能的影響,從而為廣義預測控制在工業生產中的應用提供一定的依據。
[1]錢積新,趙均,徐祖華.預測控制[M].北京:化學工業出版社,2007.
[2]Clarke D W,Mohtadi C,Tuffs P S.Generalized Predictive Control,Part Ⅰ :The Basic Algorithm [J].Automatica,1987,23(2):137-148.
[3]Clarke D W,Mohtadi C,Tuffs P S.Generalized Predictive Control,Part Ⅱ:Extensions and Interpretations[J].Automati-ca,1987,23(2):149-160.
[4]劉麗麗.基于廣義預測控制的中頻感應加熱系統溫度控制[J].科學技術與工程,2009,9(2):415-418.
[5]陳希平,朱秋琴,王彩霞.廣義預測控制算法的研究[J].控制工程,2005(5):35-37.
[6]王東風.基于CARMA模型的廣義預測控制解耦設計[J].自動化技術與應用,2001,20(6):5.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
