一種改進的混合高斯模型運動目標檢測算法
2012-06-29 01:37:24任克強余啟明羅會蘭
電視技術 2012年23期
任克強,余啟明,羅會蘭
(江西理工大學信息工程學院,江西 贛州 341000)
責任編輯:魏雨博
運動目標檢測是計算機視覺領域中的一個重要內容,其檢測效果將會對目標跟蹤與識別造成一定的影響[1]。目前較為常用的運動目標檢測方法有光流法[2]、幀間差分法[3]和背景減法[4]。目前,常見的背景建模方法有均值濾波、線性預測、W4方法、高斯模型法[5-6]及核密度估計法[7]等。
Stauffer和 Grimson[5]提出的混合高斯建模(Gaussian Mixture Model,GMM)是在戶外運動目標檢測中應用較多的背景建模方法。劉鑫等[8]將GMM與幀間差分相結合來更新高斯模型的學習速率,增強混合高斯模型處理運動干擾和多層背景的能力。馬義德等[9]提出均值與方差采用不同的學習率,其中均值更新采用自適應的學習速率,方差的學習率取固定值的方法,以解決GMM方法中均值和方差自適應性慢等缺點,但對背景更新過慢造成的“拖影”問題處理并不理想。本文對GMM方法進行了改進,將背景建模分為背景初始和背景穩固兩個階段,分別采用不同的自適應策略來更新學習速率,并在HSV空間進行陰影檢測和抑制。
1 混合高斯模型
混合高斯模型使用K個高斯模型來表征圖像中各個像素點的特征,在獲得一幀新的圖像后,更新混合高斯模型,采用匹配的方法來判斷某像素點是否是背景點。混合高斯模型進行運動目標檢測主要包括以下幾個步驟:背景建模、參數更新、背景模型的生成以及運動目標的提取。
1.1 背景建模
對視頻圖像中的每一個像素,用K個高斯模型表示某一像素點在某個時間的狀態,假設Xt為t時刻的像素點,則其概率函數為

式中:K為混合高斯模型的個數,一般取3~5;wi,t為第i個高斯模型在 t時刻的權值; η(Xt,ui,t,Σi,t)為概率密度函數;ui,t為 t時刻第 i個高斯模型的均值向量; Σi,t為模型的協方差矩陣,i=1,2,…,K。
1.2 參數更新
將當前幀各點的像素值I(x,y)與K個高斯分布進行匹配,若滿足式(3),則I(x,y)與高斯分布匹配,否則為不匹配。

式中:D為置信參數,一般取2.5;ui,t-1為第i個高斯分布在t-1時刻的均值;σi,t-1為第i個高斯分布在t-1時刻的標準差。
1)如果匹配成功,則對與之相匹配的高斯分布的參數進行更新
式中: α 為學習速率,取 0.005; ρ= α × η(Xt,ui,t,Σi,t) 。
2)如果匹配不成功,則建立一個新的高斯模型,同時去掉最不可能是背景模型的高斯分布。其他高斯分布均值和方差不變,但權值按式(7)更新

1.3 背景模型的生成及運動目標的提取
每個像素建立混合高斯模型時,只有一個或者幾個高斯分布代表背景,其他的代表前景。由于背景出現的時間一般較長,權重較大,所以高斯混合模型中代表背景的高斯分布是那些權重較大的分布。因此,選擇代表背景模型的高斯分布時,先將高斯分布按w/μ的值降序排列,最有可能成為高斯背景的排列在前,然后取前B個分布作為高斯分布的背景模型

式中:T是一個全局的先驗概率,它表示出現在像素范圍內屬于背景像素的概率。
在實際應用中,T的值需要預先設定。如果T取值過小,則背景模型就變成單模態,這時僅僅使用了最有可能的單個高斯分布作為背景。隨著T取值增大,背景模型會包含更多的高斯分布,產生一種透明的效果,允許背景模型接受兩個或兩個以上的色彩值,但是隨著高斯分布數量的增加,計算量劇增,故T的取值不能過大,一般取0.8。
選取B個高斯模型后,將當前幀的像素值I(x,y)與已經選取的背景分別進行匹配。如果I(x,y)與背景模型不匹配,則判定此像素點為前景點(即運動目標),否則為背景點。
2 算法改進
傳統混合高斯模型在初始化過程中,由于背景建模初期的數據很少,會導致一些非背景模型像素的權重過大,從而不能很好地反應像素的真實分布;背景形成以后,由于學習速率較小,某些像素一旦被判為背景需要很長時間才能從背景中脫離現來;如果目標運動較慢,還會出現“拖影”,影響運動目標的檢測。因此,本文采用動態更新學習速率的方法來生成背景模型,從而削減“拖影”,并利用HSV色彩空間中陰影的色彩和亮度比背景暗,飽和度幾乎一樣這一特性來消除陰影。
2.1 學習速率的改進
學習速率α的選取十分重要,α取值過小,適應環境的變化需要較長時間,這樣會把某些已經不是前景的物體誤判成運動目標;α取值過大,雖然適應環境變化的能力增強了,但容易使目標溶入背景。
本文將背景建模分為背景初始和背景穩固兩個階段,分別采用不同的自適應策略來更新學習速率。
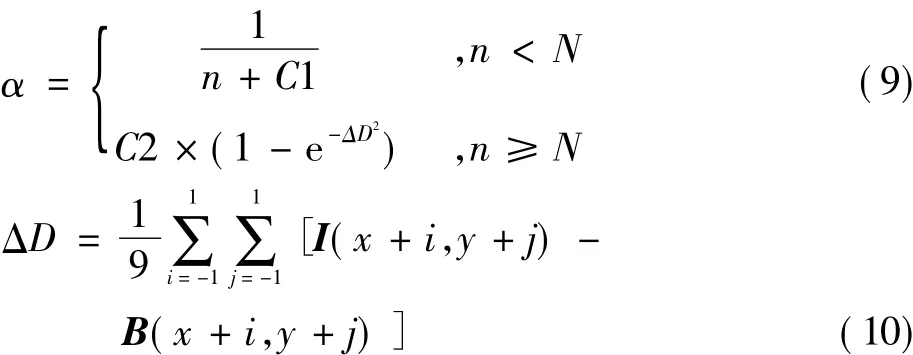
式中:n為當前視頻流過的幀數;N為視頻的前N幀;C1,C2均為常數,C1用于消除學習速率α在初始幾幀變化過快所帶來的目標溶入背景的現象,C2為背景穩固階段的最大學習速率;ΔD為當前幀I(x,y)的前景與背景鄰近8個像素值之差;i,j均為整數。
1)背景初始階段(n<N):在視頻開始的若干幀,由于背景尚未形成,故采用較大的學習速率以加快初始背景建模的速率;隨著背景的逐漸形成,學習速率逐步減小。
2)背景穩固階段(n≥N):形成背景以后,方差已經收斂,其學習速率應小于背景初始階段的學習速率,以穩住背景。學習速率由前景和背景鄰近像素值的差動態更新,以解決背景模型更新造成的“拖影”現象。其基本思想是:當ΔD較大時,說明前景像素運動較快,應適當加大學習速率來穩住背景;當ΔD較小時,說明前景像素運動較慢,則適當減小學習速率來穩住背景。
高斯分布是通過對大量灰度值統計提出的,當N太小時,統計的灰度值太少,初始背景模型不能達到穩定的高斯分布,導致后續背景模型很難達到穩定的高斯分布;同時,背景初始階段的學習速率應該大于或等于背景穩固后的最大學習速率C2,故N也不能過大。N的取值一般為120≤N≤250。
2.2 陰影的抑制
視頻序列中的運動陰影帶有運動目標位置、形狀等信息,容易被誤判為運動目標,從而使得運動目標變形,甚至使目標丟失。因此,陰影抑制在運動目標檢測中十分重要。與RGB色彩空間相比,HSV色彩空間更接近于人眼視覺模型,能直接反映色彩的亮度信息,從而可以更準確地區別陰影和運動目標[10]。
設IH(x,y) ,IS(x,y),IV(x,y) 分別為當前像素值的H,S和V 分量;BH(x,y) ,BS(x,y) ,BV(x,y)分別為背景像素值的H,S和V分量,則滿足式(11)的像素值為陰影。
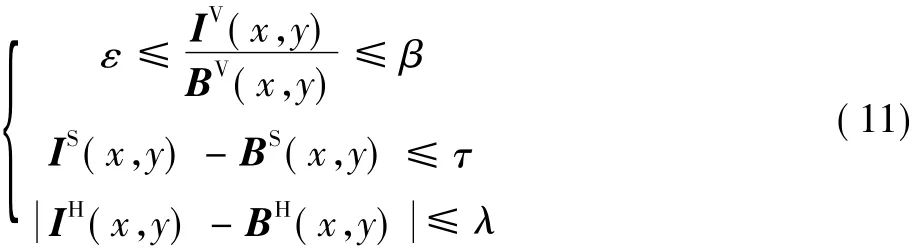
式中:ε,β,τ和λ為常數,0<ε<β<1;ε的取值主要考慮陰影的強度,陰影較強時,ε取較小值;β用來增強對噪聲的穩健性;τ,λ用來增強陰影檢測的抗噪聲性能,一般選取較小的值。
3 實驗結果與分析
為了驗證本算法的性能,在VC++和OpenCV平臺下,對GMM方法和本文方法進行了運動目標檢測比較實驗,測試序列為 HighwayⅡ(500幀,320×240),Campus(1179幀,352×288)和 Intelligent room(300幀,320×240),實驗參數為:K=3,T=0.8,C1=20,C2=0.005,N=180,ε =0.4,β=0.95,τ=0,λ =50。
圖1為測試序列HighwayⅡ第7幀的運動目標檢測結果,主要比較兩種方法背景建模初始階段的檢測效果。由于GMM方法的學習速率為固定值,導致背景并未完全更新,仍有部分運動車輛的殘留,故會出現一些孤立的非運動目標。本文方法為在視頻開始的若干幀采用較大的學習速率加快初始背景的建模,使得模型在初始階段能更快地適應背景變化,從而提取的運動目標更接近于真實情況。
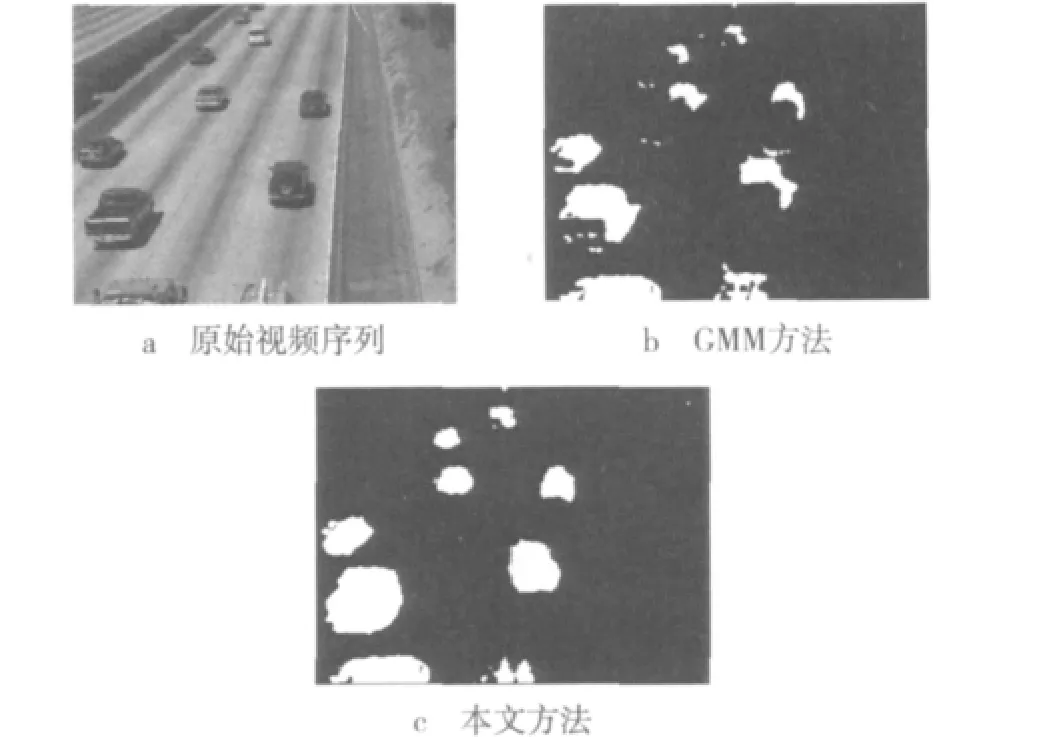
圖1 HighwayⅡ序列的檢測結果
圖2為測試序列Campus第353幀的運動目標檢測結果,主要比較兩種方法背景建模穩固階段的檢測效果。GMM方法提取運動目標時,道閘被誤判為運動目標,但道閘在第300幀時已經關閉,并處于靜止狀態。其原因是GMM方法的固定學習速率不能很好地適應場景的變化,一旦道閘被判定為前景,就需要較長的時間從前景中消失。本文方法采用自適應的學習速率調整策略,根據背景的變化動態調整學習速率,從而能夠及時更新背景,準確地檢測運動目標。

圖2 Campus序列的檢測結果
圖3為測試序列Intelligent room第285幀的運動目標檢測結果,主要比較兩種方法對緩慢運動目標的檢測效果。GMM方法在背景更新過程中,沒有考慮目標運動速度的快慢,當目標運動過慢時,檢測結果出現了不合理的“拖影”。本文方法采用前景和背景鄰近像素值的差動態更新學習速率,根據目標運動的快慢自適應地調整學習速率,較好地解決了“拖影”問題。
此外,本文方法在HSV空間進行了陰影檢測和抑制,消除了陰影的干擾,取得了較好的效果。
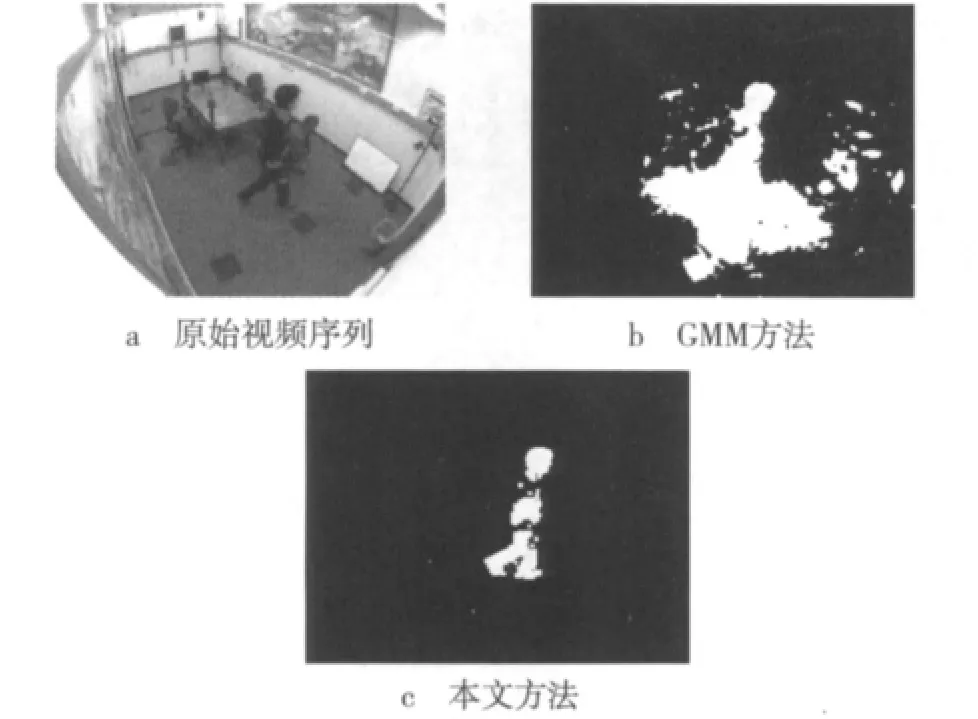
圖3 Intelligent room序列的檢測結果
4 結束語
學習速率是基于GMM的運動目標檢測算法中的一個重要參數,對運動目標的檢測效果有著重要的影響,自適應的學習速率調整策略是提高運動目標檢測質量的有效途徑。本文根據背景建模不同階段的特點,分別采用不同的自適應調整策略動態更新學習速率,較好地解決了傳統GMM方法采用固定學習速率所帶來的問題,取得了較好的運動目標檢測效果。
[1]張水發,丁歡,張文生.雙模型背景建模與目標檢測研究[J].計算機研究與發展,2008,48(11):1983-1990.
[2]羅寰,王芳,陳中起,等.基于對稱差分和光流估計的紅外弱小目標檢測[J].光學學報,2010,30(6):1715-1720.
[3]王平,陳素華,董福洲.運動目標檢測技術在智能監控系統中的應用[J].電視技術,2007,31(10):81-83.
[4]BENEZETH Y,JODOIN P M,EMILE B,et al.Comparative study of background subtraction algorithms[J].Electronic.Imaging,2010,19(3):301-312.
[5]STAUFFER C,GRIMSON W E L.Adaptive background mixture models for real-time tracking[C]//Proc.IEEE International Conference on Computer Vision and Pattern Recognition,1999.Fort Collins:IEEE Press,1999:246-252.
[6]江登表,程小輝.基于高斯運動模型的車輛檢測[J].電視技術,2009,33(8):103-106.
[7]孫志海,張樺,武二永,等.非參數核密度估計視頻目標空域定位技術研究[J].光電工程,2010,37(8):12-18.
[8]劉鑫,劉輝,強振平,等.混合高斯模型和幀間差分相融合的自適應背景模型[J].中國圖象圖形學報,2008,13(4):729-734.
[9]馬義德,朱望飛,安世霞,等.改進的基于高斯混合模型的運動目標檢測方法[J].計算機應用,2007,27(10):2544-2546.
[10]CUCCHIARA R.,GRANA C.,PICCARDI M,et al.Improving shadow suppression in moving object detection with HSV color information[C]//Proc.IEEE 2001 Conference on Intelligent Transportation Systems,2001.Oakland:IEEE Press,2001:334-339.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
當代陜西(2020年14期)2021-01-08 09:30:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
光學精密工程(2016年6期)2016-11-07 09:07:19