安防領(lǐng)域中運(yùn)動(dòng)目標(biāo)自動(dòng)跟蹤算法的設(shè)計(jì)
2012-07-02 01:15:25陳暑生謝巍黃旭東鄺穎怡
自動(dòng)化與信息工程 2012年4期
陳暑生 謝巍 黃旭東 鄺穎怡
(華南理工大學(xué)自動(dòng)化科學(xué)與工程學(xué)院)
安防領(lǐng)域中運(yùn)動(dòng)目標(biāo)自動(dòng)跟蹤算法的設(shè)計(jì)
陳暑生 謝巍 黃旭東 鄺穎怡
(華南理工大學(xué)自動(dòng)化科學(xué)與工程學(xué)院)
本文闡述了一種安防領(lǐng)域中運(yùn)動(dòng)目標(biāo)自動(dòng)跟蹤算法的實(shí)現(xiàn),該系統(tǒng)用于控制攝像機(jī)捕捉移動(dòng)目標(biāo),主要由超聲波傳感器、舵機(jī)云臺(tái)、攝像頭、上位機(jī)監(jiān)控界面等組成。由兩組超聲波傳感器對(duì)運(yùn)動(dòng)目標(biāo)進(jìn)行綜合定位,通過(guò)數(shù)學(xué)運(yùn)算的方式,得出物體較精確的二維坐標(biāo),處理得到云臺(tái)的控制量,控制攝像機(jī)跟蹤目標(biāo),并在上位機(jī)上顯示狀態(tài)。
運(yùn)動(dòng)目標(biāo);自動(dòng)跟蹤;超聲波;檢測(cè)
0 引言
運(yùn)動(dòng)目標(biāo)跟蹤系統(tǒng)由超聲波傳感器、舵機(jī)云臺(tái)、攝像頭、上位機(jī)監(jiān)控界面等組成。在上位機(jī)界面上可以看到運(yùn)動(dòng)目標(biāo)的位置,同時(shí)也可以在手動(dòng)模式下通過(guò)按鈕操作攝像頭。系統(tǒng)整體架構(gòu)圖如圖1所示。

圖1 運(yùn)動(dòng)目標(biāo)自動(dòng)跟蹤系統(tǒng)整體架構(gòu)圖
超聲波傳感器是本系統(tǒng)的重要組成部分,利用了超聲波碰到障礙物產(chǎn)生反射的原理來(lái)測(cè)量區(qū)域內(nèi)運(yùn)動(dòng)目標(biāo)的距離。計(jì)算距離的公式采用:速度×?xí)r間=距離,其中時(shí)間用單片機(jī)的定時(shí)器可以精確地測(cè)量[1]。由多個(gè)超聲波檢測(cè)到的距離信號(hào)只有經(jīng)過(guò)四通道數(shù)字控制模擬開(kāi)關(guān)CD4052篩選后送入單片機(jī),才能只占有一個(gè)單片機(jī)發(fā)射口、一個(gè)外中斷接收,完成多路超聲波的測(cè)量。
舵機(jī)云臺(tái)是本系統(tǒng)的執(zhí)行部分。通過(guò)處理超聲波測(cè)得的距離,得到物體的二維坐標(biāo),再經(jīng)坐標(biāo)變換得到舵機(jī)的控制量。攝像頭則固定于云臺(tái)之上,云臺(tái)動(dòng)作時(shí)調(diào)整攝像頭的朝向。
1 硬件設(shè)計(jì)
1.1 系統(tǒng)硬件結(jié)構(gòu)
本系統(tǒng)以ATMEGA32芯片為控制核心,系統(tǒng)硬件框圖如圖2所示[1]。電源模塊起穩(wěn)壓作用,為硬件系統(tǒng)提供5V的直流電壓。

圖2 運(yùn)動(dòng)目標(biāo)自動(dòng)跟蹤系統(tǒng)硬件架構(gòu)圖
單片機(jī)控制切換超聲波測(cè)量通道,測(cè)出多組距離,并運(yùn)算處理得到物體的二維坐標(biāo)。單片機(jī)與每個(gè)舵機(jī)只需一個(gè)I/O口的信號(hào)線進(jìn)行控制,通過(guò)調(diào)節(jié)不同占空比調(diào)整轉(zhuǎn)角,最終使攝像頭跟蹤物體。同時(shí),單片機(jī)與上位機(jī)通過(guò)串口連接。將物體的二維坐標(biāo)分幾個(gè)字節(jié)發(fā)送給上位機(jī),在上位機(jī)上顯示物體位置。
1.2 超聲波測(cè)距模塊設(shè)計(jì)
超聲波的發(fā)射采用74LS04非門(mén)構(gòu)成的簡(jiǎn)單推挽式驅(qū)動(dòng),將單片機(jī)控制發(fā)出40 kHz的調(diào)制信號(hào)輸入到74LS04。超聲波發(fā)射電路圖如圖3所示。

圖3 超聲波發(fā)射電路圖
接收芯片采用CX20106,它是一款廣泛應(yīng)用于紅外線檢波接收的專用芯片,具有功能強(qiáng)、性能優(yōu)越、外圍接口簡(jiǎn)單、成本低等優(yōu)點(diǎn)。由于紅外遙控常用的CX20106芯片的接收頻率38 kHz與超聲波頻率40 kHz比較接近,故采用CX20106芯片實(shí)現(xiàn)接收電路。當(dāng)接收到與CX20106濾波器中心頻率相符的回波信號(hào)時(shí),輸出端7腳輸出低電平,且7腳直接接到ATMEGA32的INT0引腳上,以觸發(fā)中斷[1]。若頻率有誤差,可調(diào)節(jié)芯片引腳5的外接電阻R42,將濾波器的中心頻率設(shè)置在40 kHz,就可達(dá)到理想的效果。經(jīng)過(guò)上述處理,調(diào)制后的40 kHz超聲波信號(hào)的接收也就變成了穩(wěn)定電平的檢測(cè),非常方便快捷。超聲波接收電路圖見(jiàn)圖4。
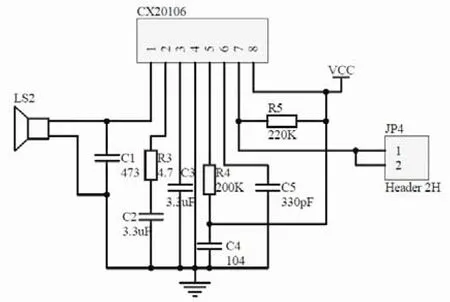
圖4 超聲波接收電路圖
1.3 舵機(jī)控制模塊設(shè)計(jì)
攝像機(jī)的朝向控制實(shí)際上是云臺(tái)舵機(jī)的控制。云臺(tái)控制電路主要為兩個(gè)舵機(jī)提供5 V的工作電源和公共線,單片機(jī)輸出控制PWM信號(hào),周期為20 ms,占空比的變化為2.5%到12.5%,對(duì)應(yīng)舵機(jī)的轉(zhuǎn)角變化為0°到180°。除了穩(wěn)定的電源之外,本模塊不需要附加的驅(qū)動(dòng)電路。
1.4 串口模塊設(shè)計(jì)
串口模塊負(fù)責(zé)ATMEGA32和上位機(jī)的通信,是單片機(jī)系統(tǒng)和計(jì)算機(jī)的溝通橋梁。ATMEGA32具有一個(gè)全雙工的串行通訊口,所以單片機(jī)和電腦之間可以方便地進(jìn)行串口通訊。電腦的串口是RS232電平,而ATMEGA32的串口是CMOS電平,兩者之間必須有一個(gè)電平轉(zhuǎn)換電路,本文采用了專用芯片MAX232進(jìn)行轉(zhuǎn)換,其工作電壓是5V[2]。
1.5 單片機(jī)模塊設(shè)計(jì)
ATMEGA32是低功耗、高驅(qū)動(dòng)能力的單片機(jī),屬于AVR單片機(jī)系列。ATMEGA32自帶32 kB Flash和2 kB RAM,還有其他強(qiáng)大的特性,如PWM、TWI、SPI等功能[3],能夠滿足不同系統(tǒng)設(shè)計(jì)需求。
2 軟件設(shè)計(jì)
2.1 系統(tǒng)整體軟件設(shè)計(jì)
整機(jī)工作流程圖如圖5所示。

圖5 整機(jī)工作流程圖
本系統(tǒng)用到兩組超聲波,每組由兩個(gè)超聲波檢測(cè)裝置組成,這兩個(gè)超聲波配合起來(lái)可以對(duì)90度夾角范圍內(nèi)的目標(biāo)進(jìn)行檢測(cè)。綜合兩組超聲波檢測(cè)裝置得到的物體距離信息,結(jié)合區(qū)域?qū)挾龋梢缘玫轿矬w的二維坐標(biāo)(x,y)。通過(guò)幾何計(jì)算可以得到攝像頭所需的俯仰角度和水平轉(zhuǎn)動(dòng)角度(視攝像頭的具體安裝位置而定),即兩個(gè)舵機(jī)的轉(zhuǎn)角控制量。為提高運(yùn)行速度,可以預(yù)先計(jì)算得到由物體的二維坐標(biāo)(x,y)到舵機(jī)控制量的映射表,運(yùn)行時(shí)通過(guò)查表來(lái)得到舵機(jī)控制量,控制舵機(jī)運(yùn)動(dòng),帶動(dòng)云臺(tái)上的攝像頭運(yùn)動(dòng),實(shí)現(xiàn)攝像頭自動(dòng)跟蹤。
2.2 超聲波測(cè)距軟件設(shè)計(jì)
超聲波利用聲音傳播的距離=聲速×反射時(shí)間/2的原理。通過(guò)上述介紹的超聲波換能器及接收芯片電路,可以將超聲波信號(hào)轉(zhuǎn)換成簡(jiǎn)單的電平信號(hào)。軟件程序上通過(guò)單片機(jī)定時(shí)器測(cè)量超聲波從發(fā)出到接收的時(shí)間,再經(jīng)上述公式簡(jiǎn)單運(yùn)算即得距離。
2.3 物體坐標(biāo)計(jì)算軟件設(shè)計(jì)
超聲波檢測(cè)軟件流程圖如圖6所示。

圖6 超聲波檢測(cè)軟件流程圖
四個(gè)超聲波檢測(cè)裝置依靠CD4052實(shí)現(xiàn)輪流測(cè)量,每?jī)蓚€(gè)為一組,這兩個(gè)超聲波可以對(duì)90度夾角范圍內(nèi)的目標(biāo)進(jìn)行檢測(cè)。若兩個(gè)超聲波裝置均檢測(cè)到物體,則距離取平均值;若僅有一個(gè)超聲波裝置檢測(cè)到物體,則以該結(jié)果作為距離值。由此得到兩組超聲波到物體的距離分別為R1、R2,結(jié)合區(qū)域?qū)挾龋捎嘞叶ɡ砜傻梦矬w的二維坐標(biāo)(x,y)。軟件上超聲波測(cè)距函數(shù)完全不需改動(dòng),每次調(diào)用不同的超聲波檢測(cè)裝置只需改變CD4052的地址腳即可。
2.4 舵機(jī)控制軟件設(shè)計(jì)
舵機(jī)控制采用一定占空比的方波控制信號(hào)。單片機(jī)輸出控制PWM信號(hào),周期為20 ms,占空比變化為2.5%~12.5%,對(duì)應(yīng)舵機(jī)的轉(zhuǎn)角變化為0°到180°。對(duì)于AVR單片機(jī),只需配置相關(guān)的寄存器值,就可以由一個(gè)定時(shí)器來(lái)控制兩路PWM信號(hào),即同時(shí)控制兩個(gè)舵機(jī)。
2.5 串口通信協(xié)議設(shè)計(jì)
系統(tǒng)得到運(yùn)動(dòng)物體的坐標(biāo)后,通過(guò)串口發(fā)送給上位機(jī)顯示。由于數(shù)據(jù)量小,串口速率采用9600 b/s。串口發(fā)送的格式為一位起始碼、3位x坐標(biāo)的BCD碼、3位y坐標(biāo)的BCD碼、一位結(jié)束碼,數(shù)據(jù)位為低位在前。上位機(jī)接收到起始位時(shí),將長(zhǎng)度清零,拋棄之前接收的數(shù)據(jù)[4];當(dāng)接到一位數(shù)據(jù)碼后,緩存長(zhǎng)度加1,直到收到結(jié)束碼且長(zhǎng)度正確時(shí),將其進(jìn)行處理,還原成位置顯示出來(lái)。
3 結(jié)束語(yǔ)
本系統(tǒng)由超聲波傳感器、舵機(jī)云臺(tái)、攝像頭、上位機(jī)監(jiān)控界面等組成。由兩組超聲波傳感器(一組有多個(gè)傳感器)對(duì)運(yùn)動(dòng)目標(biāo)進(jìn)行綜合定位,通過(guò)數(shù)學(xué)運(yùn)算的方式,得出物體較精確的二維坐標(biāo),處理得到云臺(tái)的控制量,并在上位機(jī)上顯示狀態(tài)。相對(duì)于圖像處理跟蹤目標(biāo)或動(dòng)態(tài)掃描檢測(cè)的方式,本方案具有實(shí)施簡(jiǎn)單方便、操作數(shù)據(jù)量少且反應(yīng)迅速的特點(diǎn)。
[1] 溫正,何嘉揚(yáng),趙志鵬.AVR單片機(jī)開(kāi)發(fā)從入門(mén)到精通[M].北京:中國(guó)電力出版社,2009.
[2] 求是科學(xué).單片機(jī)典型模塊設(shè)計(jì)實(shí)例導(dǎo)航[M].北京:人民郵電出版社,2004.
[3] 胡漢才.單片機(jī)原理及其接口技術(shù)(第2版)[M].北京:清華大學(xué)出版社,2006.
[4] 蔡志明,盧傳富,李立夏,等.精通Qt4編程[M].北京:電子工業(yè)出版社,2008.
Algorithm Design of Moving Object Automatic Tracking in the Security Application
Chen Shusheng Xie Wei Huang Xudong Kuang Yingyi
(College of Automation Science and Engineering, South China University of Technology)
This paper describes an algorithm of tracking moving object in the field of security automatically. The system consists of ultrasonic sensors, PTZ, camera, PC control interface and other components. Through two sets of ultrasonic sensors (a group of more than one sensor) getting the position of moving target, and an accurate two-dimensional coordinates of objects is obtained by the way of math, volume of PTZ can be controlled, and the status can be displayed in the PC. The program has characteristics such as simple and easy to implement and manipulate, and less responsive.
Moving Target; Automatic Tracking; Ultrasonic; Detection
陳暑生,男,1991年生,研究生,研究方向:自動(dòng)化與信息系統(tǒng)工程。E-mail: eesschen@qq.com。
謝巍,男,教授,博士,研究方向:魯棒控制,自適應(yīng)控制。
黃旭東,男,1988年生,研究生,研究方向:自動(dòng)化與信息系統(tǒng)工程。
鄺穎怡,女,1989年生,本科生,研究方向:自動(dòng)化與信息系統(tǒng)工程。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45