高壓變頻矢量控制系統的仿真
2012-07-02 03:27:08王英朱麗媛
大連交通大學學報 2012年3期
關鍵詞:變頻器
王英,朱麗媛
(大連交通大學 電氣信息學院,遼寧 大連 116028)*
0 引言
隨著電氣傳動技術,尤其是變頻調速技術的發展,高壓變頻技術得到了廣泛應用.高壓變頻器有多種拓撲結構,其中單元串聯型拓撲結構是應用最普遍且最有發展前景的一種拓撲結構.單元串聯型高壓變頻技術的應用使得變頻器有完美無諧波的電壓輸出;其高質量的波形輸出使電機不需要降額使用;其多重化技術可使電網功率因數保持在0.95以上,不需要任何的功率補償裝置,這遠遠優于其它類型的變頻調速系統[1].
單元串聯型高壓變頻系統采用矢量控制策略進行控制,可以提供更好的調速性能,本文根據載波移相SPWM控制和矢量控制的基本原理,對基于矢量控制的單元串聯型高壓變頻系統進行了分析研究,利用MATLAB建立了高壓變頻矢量控制系統仿真模型,并對此進行了仿真分析.仿真結果表明,基于矢量控制的單元串聯型高壓變頻系統具有良好的動態特性,可以滿足工業領域對高品質的交流調速系統的要求.
1 單元串聯型高壓變頻矢量控制系統
1.1 系統結構
高壓變頻矢量控制系統主要由移相變壓器、功率單元和矢量控制器組成,圖1為6單元串聯高壓變頻矢量控制系統的簡單結構圖.其中輸入側采用多重化技術,可有效消除對電網的諧波污染;輸出側功率單元采用載波移相SPWM技術,能夠提高輸出電壓的等效開關頻率.功率單元串聯這種拓撲結構的一個顯著特點是,當其中一個功率單元出現故障時,可自動退出系統,而其余的功率單元可繼續保持電機的運行,減少停機時造成的損失[2].
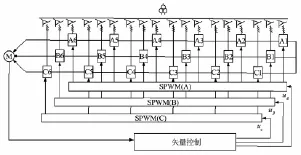
圖1 高壓變頻矢量控制系統的簡單結構圖
1.2 系統的矢量控制
本系統采用的是基于轉差頻率的矢量控制策略..轉差頻率矢量控制不需要進行復雜的磁通檢測和繁瑣的坐標變換,只要在保證轉子磁鏈大小不變的前提下,通過檢測定子電流和轉子角速度,經過數學模型的運算就能實現間接的磁場定向控制,其控制的基本方程式如下[3]:

式中,ism為定子電流的勵磁分量;ist為定子電流的轉矩分量;Tr為轉子時間常數;p為微分算子.若保持磁通不變,則Trp=0,由上述矢量控制方程(1)~(3)計算可以得到:

圖2為基于轉差頻率控制的異步電機矢量控制調速系統原理框圖,異步電機轉速ω與給定轉速ω*比較,通過轉速調節器得到定子轉矩電流.由于單元串聯型高壓變頻系統采用電壓型變頻器,故需要相應的將電流控制轉換為電壓控制,其變換關系為:


圖2 轉差頻率控制的矢量控制系統原理框圖
2 單元串聯型高壓變頻矢量控制系統的建模與仿真
2.1 矢量控制系統建模
根據前述單元串聯型高壓變頻器的矢量控制原理,建立基于Simulink的高壓變頻矢量控制系統仿真模型,如圖3所示.
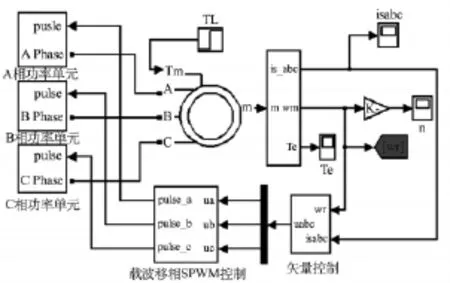
圖3 高壓變頻矢量控制系統仿真模型
功率單元模塊采用單元串聯型的結構,獨立直流電源供電,相子模塊內部結構如圖4所示.每個功率單元的SPWM信號由載波移相SPWM方法生成.
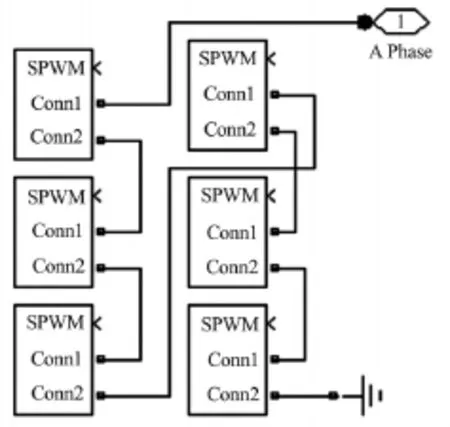
圖4 相子模塊內部示意圖
矢量控制模塊采用轉差頻率矢量控制,由給定、PI調節器、函數運算和坐標變換組成,利用異步電動機的矢量控制方程式:式(1)~(3)搭建出Simulink仿真模型如圖5所示.其中ASR采用的是帶輸出限幅的PI調節器如圖6所示.

圖5 矢量控制子模塊

圖6 PI調節器
載波移相SPWM控制模塊的功能是是將矢量控制中經2r/3s變換所得到的三相正弦電壓參考信號作為調制波,分別與N對相位差為π/N的三角載波相比較,從而得到SPWM脈沖信號,得到的N路SPWM脈沖分別控制單相N個功率單元,把得到的輸出電壓進行串聯疊加,從而產生2N+1個電平的輸出相電壓.圖7為單個功率單元SPWM脈沖發生模型.

圖7 兩三角波與調制波比較SPWM脈沖發生模型
2.2 仿真分析
利用MATLAB對如圖3所示的單元串聯型變頻系統進行仿真.變頻器采用6單元串聯型結構,結構如圖1所示.電機采用380 V普通電機,功率單元直流電源采用36 V.電機參數設為:線電壓 U=380 V,頻率 f=50 Hz,極對數 np=2,定子電阻 RS=0.435 Ω,定子電感 Ls=0.002 H,轉子電阻 Rr=0.816 Ω,轉子電感 Lr=0.002 H,轉動慣量 J=0.19 kg·m2,定轉子互感 Lm=0.069 H.仿真給定轉速為1 400 r/min時的空載起動過程,在啟動0.5 s后加TL=60 N·m的負載轉矩.設置仿真時間為0.8 s.圖8為變頻器調制波波形及輸出電壓波形,其中圖8(a)為變頻器A相載波移相SPWM調制波,圖8(b)為變頻器A相輸出電壓,圖8(c)為0.64~0.68 s變頻器A相輸出電壓放大圖.圖9為電機的輸出特性,其中圖9(a)為異步電機定子A相電流波形,圖9(b)為電機轉速波形,圖9(c)電機轉矩波形.

圖8 變頻器調制波及輸出電壓波形
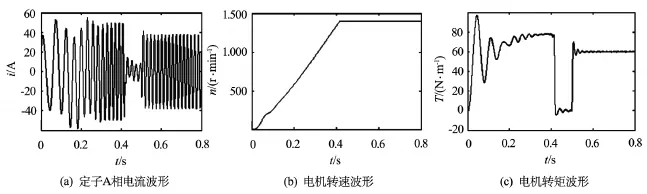
圖9 電機輸出特性波形
根據仿真結果可以看出,三相異步電動機在矢量控制、載波移相SPWM以及六個功率單元串聯驅動的條件下,電機繞組相電壓波形如圖8(c)所示為13電平,符合電平數與級聯單元數之間表達式的2N+1關系,其波形更加接近正弦波;隨時間變化,轉速逐漸上升,在0.42 s時,轉速稍微有超調后穩定在1 400 r/min;啟動電流為50 A左右,之后電流下降為空載電流.在異步電機加載后電流迅速上升,電動機的轉矩也隨之增加,轉速在略微調整后恢復不變.
由仿真結果可以得到,異步電機在單元串聯型變頻矢量控制系統驅動下,不但其電壓、電流波形諧波含量少,而且其調速特性有很大的提高.
3 結論
單元串聯型高壓變頻器是目前應用最為成熟的一種拓撲結構,是在高壓變頻調速領域占絕對優勢的一種技術;而單元串聯型高壓變頻矢量控制系統,能夠很好的提高電網質量,減少輸出諧波并有效防止電機的轉矩脈動.因此,本文對基于矢量控制的單元串聯型高壓變頻系統進行了研究分析,并對其進行了建模仿真,仿真結果表明此高壓變頻矢量控制系統具有良好的控制性能,能夠滿足工業生產對高壓電機調速控制的要求.
[1]郭建平,歐陽紅林.高壓變頻器的級聯移相控制[J].防爆電機,2008,43(5):17-19.
[2]趙文承.單元串聯多電平高壓變頻器技術分析[J].山東冶金,2004(6):23-25.
[3]洪乃剛.電力電子、電機控制系統的建模和仿真[M].北京:機械工業出版社,2011.
[4]吳國祥,江友華.級聯型多電平高壓變頻器研究[J].電機與控制應用,2007,34(1):34-38.
[5]南永輝,羅仁俊,伍海林,等.基于級聯型多電平高壓變頻器的異步電機控制策略[J].變流技術與電力牽引,2008(5):11-15.
[6]張皓,續明進,楊梅.高壓大功率交流變頻調速技術[M].北京:機械工業出版社,2007.
猜你喜歡
消費電子(2022年6期)2022-08-25 09:47:16
鍛壓裝備與制造技術(2021年3期)2021-08-13 08:39:56
防爆電機(2020年3期)2020-11-06 09:07:42
活力(2019年22期)2019-03-16 12:47:40
測控技術(2018年5期)2018-12-09 09:04:50
四川冶金(2017年6期)2017-09-21 00:52:30
電子制作(2017年7期)2017-06-05 09:36:13
電子測試(2017年23期)2017-04-04 05:07:32
自動化博覽(2014年12期)2014-02-28 22:34:39
自動化博覽(2014年10期)2014-02-28 22:33:52
