基于數控機床(CNC)機群的工業移動機器人設計
2012-07-04 09:43:00段宏君
制造業自動化 2012年14期
王 晉,段宏君
(安陽師范學院 物電學院,安陽 455002)
0 引言
在經濟發展中,數控機床已成為制造業領域的基本設備。目前,中國的數控機床越來越多,但產品自動化水平卻相當低[1,2]。經濟數控機床的質量在提高,改進數控機床的質量也在提高,智能移動機器人服務的數控機床組由不少于兩臺的數控機床組成,這為移動智能機器人的發展提供了機遇。
大多數國內公司和研究部門側重于研究服務單臺數控機床的自動換刀裝置及鉗位操作器,它強調智能、高速及高精度,對經濟成本和實用性的考慮較少。但是對國內中小型制造企業來說,控制經濟成本及實用性才是最重要的。有些研究更關注機器人的配置和靈活性,對數控機床和機器人之間的通信協同操作處理較少[3,4]。目前中國還沒有關于智能移動機器人服務數控機床組及完成多個任務這方面的報道。國內中小型制造企業對這類機器人需求越來越多[5~7]。本文提出了設計服務數控機床組的智能機器人的新理論。為使很多中小型制造企業節省費用,機器人與數控機床組的實時通信技術由標準件和簡單的機械結構組成。除此之外,通過軟件集成,實現了機器人的可靠性和穩定性。
1 機器人結構設計
機器人包括執行機構和運動平臺。執行機構采用雙四桿機構聯動和柔性夾持器,可實現無運動盲區。執行機構如圖1所示。
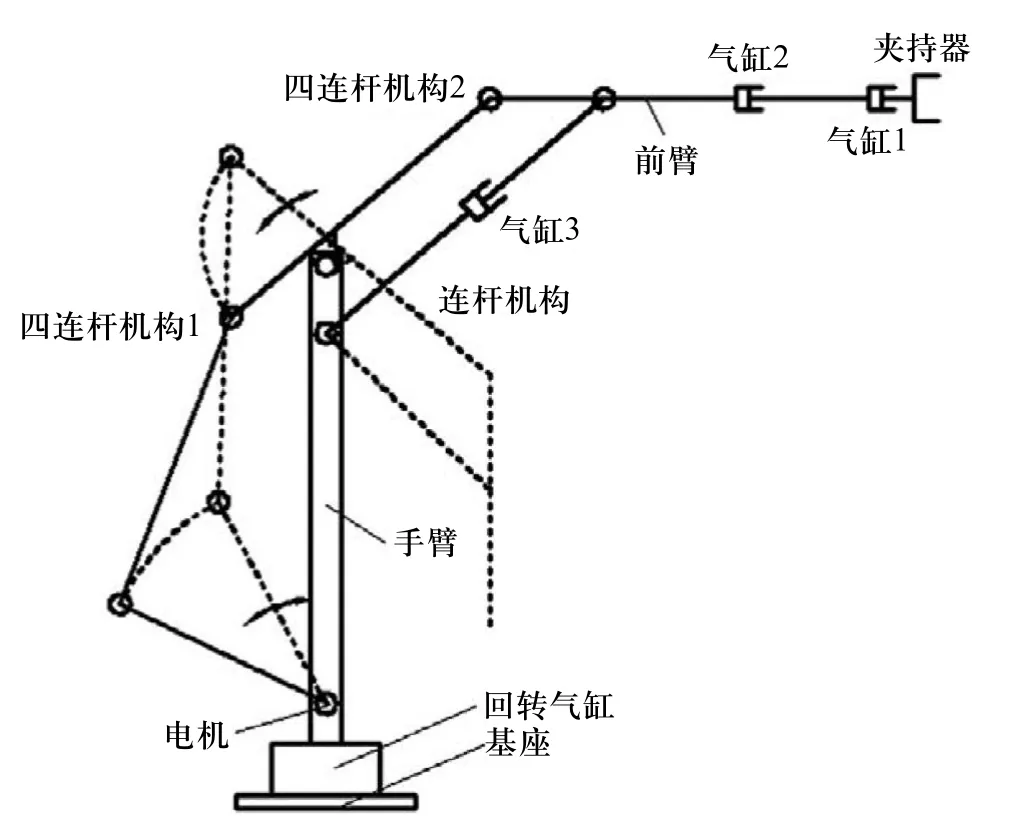
圖1 執行機構
機器人機構由手臂、前臂、夾持器和基礎組成。手臂和前臂由雙四桿機構聯系起來,可以完成動力傳輸。為前臂提供動力的電機靠近基礎安裝,因此執行機構重心較低。這樣可以最大程度上使機器保持平衡。四連桿機構2用于調整氣缸3的連桿機構長度,所以在垂直平面具有旋轉角。這種機構能最大程度上拓寬夾具的作業范圍。回轉式氣缸可以使執行機構在水平面內旋轉,所以夾持器可實現無盲區運動。夾持器能夠利用靈活機制,采取多種形式的工件和刀具,改進機器人的性能,擴大應用領域。
運動平臺做往復直線運動,如圖2所示。平臺包括車體、導軌、車輪、旋轉編碼器、電機、電氣控制系統、驅動控制器和副定位器。車體安放在導軌上,由框架結構組成。當車體在軌道上高速運行時,軌道外側的輪緣可防止車體脫軌。行星齒輪電力馬達安裝在主傳動軸上。車輪和傳動軸采用活套張緊輥連接,位于旋轉編碼器上。活套張緊輥必須安裝在低速輪上。驅動控制器和電氣控制系統安裝在車體內,由鋼絲繩連接。
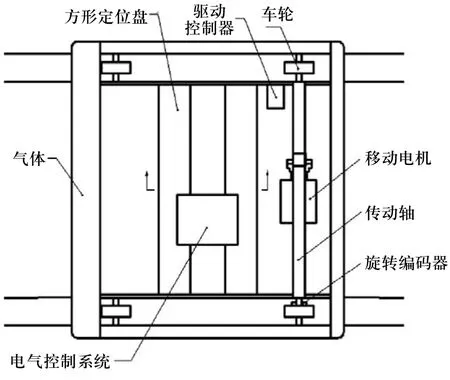
圖2 往復運動裝置
2 基于ZIGBEE、GPRS和3G模塊的通信技術
機器人與數控機床間的無線通訊采用Zigbee。拓撲結構如圖3所示。
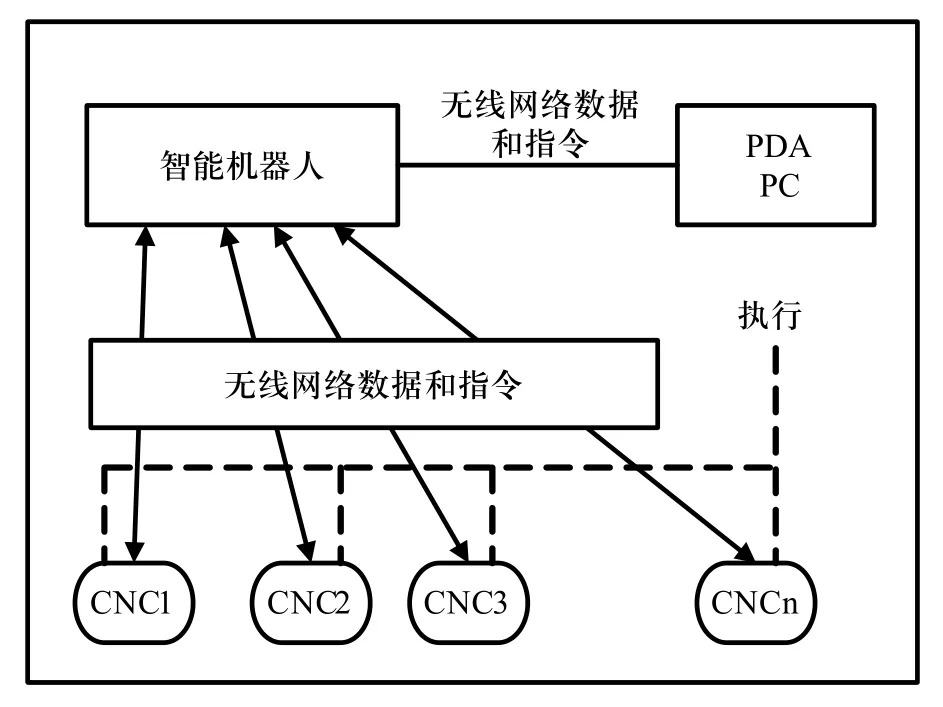
圖3 機器人—數控機床網絡的拓撲結構
ZigBee(IEEE 802.15.4標準)是一種新興的無線網絡技術,它具有短源距、低復雜性、低功耗、低數據率和低成本的特點。因為ZigBee技術的抗干擾能力強,本文首先將其引入機器人和數控機床之間的通訊中。利用GPRS和3G模塊可實現工作空間中的無線通信。中部節點采用ARM處理器和存儲器,具有強大的處理能力和存儲空間,以便需要的時候提供給數控機床的程序。機器人將數控程序傳輸給數控機床,對程序進行調試。當調試結束,調試結果會由機器人,而不是數控機床直接傳輸給監控器(個人電腦或個人數字設備)。該系統采用星型拓撲結構。數控機床組和監控電腦或個人數字設備是外圍節點,機器人為中部節點。具體框架如圖4所示。
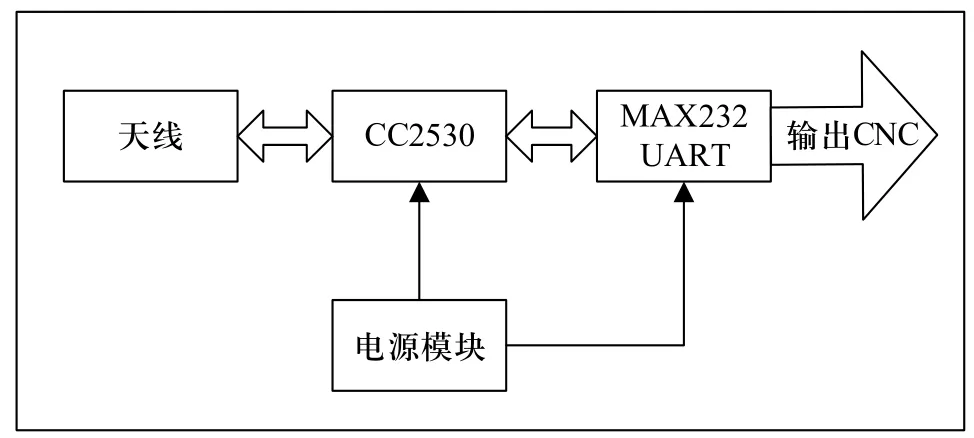
圖4 節點結構
3 機器人視覺系統的智能控制技術
機器人視覺系統采用先進的無線傳感器模塊、無線通信模塊、無線ccd相機。機器人利用無線ccd相機和無線傳感器分析夾具作業姿態及數控機床狀態,然后將這些視頻信號傳輸給無線傳感器。接收這些處理過的視頻信號后,無線傳感器將其傳送給ARM處理器。ARM處理器將根據這些信號作出決策,并通過無線通信模塊將決策傳輸給機器人。閉環控制系統將按上文所述創建,確保機器人在運動中的精確定位和導航。該系統結構如圖5所示。
該技術具有以下優點:
1)應用嵌入技術和視覺技術使控制系統成為融合系統;
2)視覺系統實現精確定位和導航(公差小于0.05 毫米 );
3)視覺系統智能判斷數控機床的狀況。
4 結論
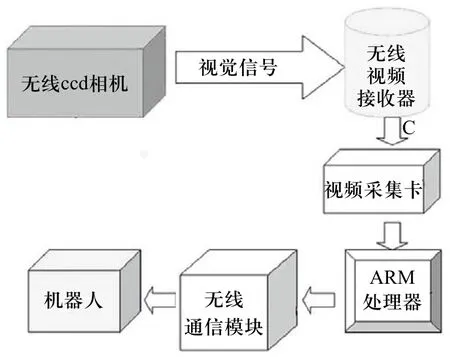
圖5 機器人控制系統結構
智能移動機器人可以完成數控機床的多種任務,這與中國制造企業的現狀相一致。機器人是成功的自動換刀裝置,也是高效鉗位機械手。更重要的是,它能夠服務不少于三臺數控機床的數控機床組,而不僅僅是一臺機床。機器人實現了中國制造企業的自動化。應用結果表明,機器人——數控機床系統能夠為企業帶來如提高生產率,降低人力成本,降低產品成本等的諸多效益。因此,機器人系統的應用能給企業帶來眾多的經濟效益。該技術理論在現代化制造中具有十分重要的現實意義和廣闊的應用前景。
[1] Jean-Marc Frayret, Sophie D.Amours.A strategic framework for networked manufacturing.Benoit Montreuil[J].Computers in Industry, 2000, 42: 229-317.
[2] 高春生, 紀永剛.AmigoBot移動機器人上位控制系統的設計[J].工礦自動化, 2012, 37(4): 104-108.
[3] Jee Haeseong, Campbell R Ian.Internet-based design visualization for layered manufacturing[J].Concurrent Engineering Research and Applications, v11, n 2, June,2003:151-158.
[4] Liu Fei, Regional Networked Manufacturing System[J],Chinese Journal of Mechanical Engineering, 2000(13)(Supplement): 97-103.
[5] 吳培良, 孔令富.一種普適機器人系統同時定位、標定與建圖方法[J].自動化學報, 2012, 38(4): 618-630.
[6] Brown Simon M, Wright Paul K.Progress report on the manufacturing analysis service, an Internet-based reference tool[J].Journal of Manufacturing Systems, v 17, n 5, 1998:389-398.
[7] Guying Zhao, Pietikainen M.Local Binary Pattern Descriptors for Dynamic Texture Recognition; Pattern Recognition,2006.ICPR 2006.18th International Conference on Volume2, Page(s): 211-214.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
制造技術與機床(2017年3期)2017-06-23 08:11:21
